Hkiil
Изобретение относится к подъемно- транспортной технике, в частности к грузозахватным устройствам.
Цель изобретения - расширение эксплуатационных возможностей путем обеспечения сохранности груза при разгрузке.
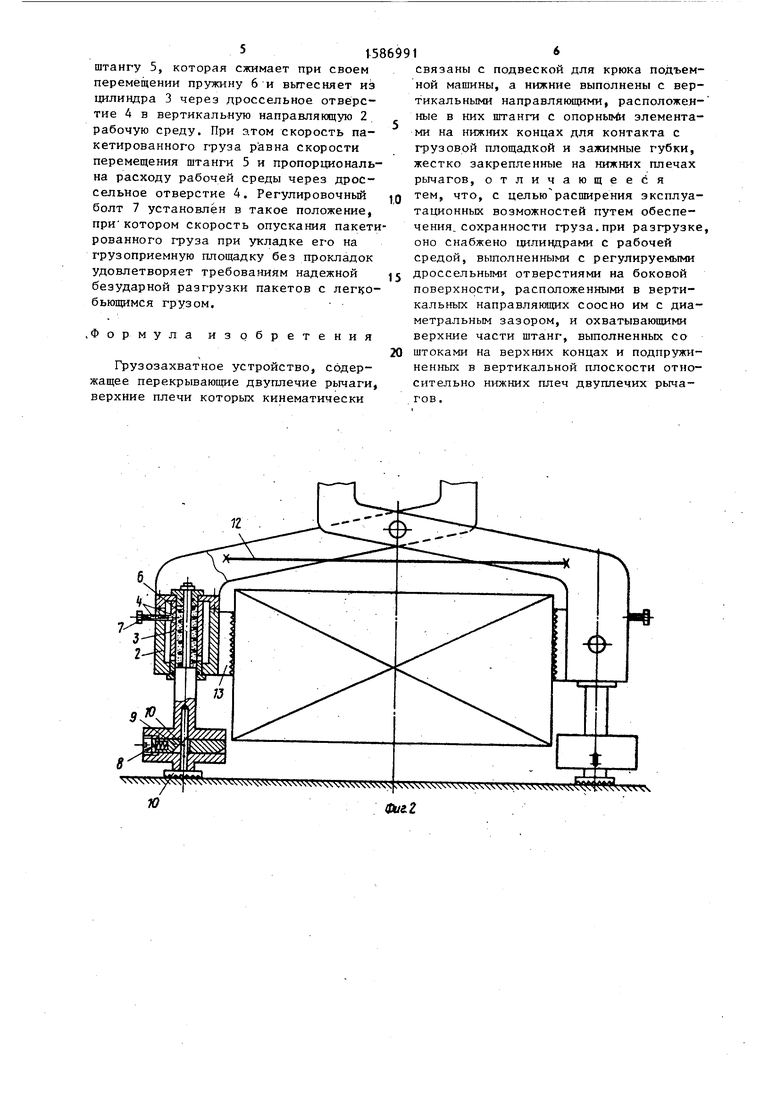
На фиг.1 изображено грузозахватное устройство в стадии захвата, общий вид; на фиг.2 - захват в промежуточной стадии укладки пакетирования груза; на фиг.З - устройство в момент окончательной укладки пакетированного груза; на фиг.4 - конструкция фикси- рУющей штанги грузозахватного устрой- с т ва.
Грузозахватное устройство содер:1кит шарнирно соединенные между собой двуплечие рычаги 1, кинематически свя- занные с подъемной машиной, в нижних частях которых выполнены вертикальные направляющие 2. В направляющих 2 расположены с зазорами цилиндры 3 с рабочей средой внутри, выполненные с регулируемьп ет -дроссельными отверстиями 4, В цилиндрах 3 установлены штанги 5, подпружиненные пружиной 6. Дроссельные отверстия 4 частично пе-. рекрыты регулировочными болтами 7. В нижней части штанги 5 установлен подпружиненный пружиной 8 фиксатор 9, который находится в постоянном контакте с подвижной пятой 10. На верхних частях штанг 7 закреплены штоки J1 . Для удержания двуплечих рьиагов 1 в рабочем положении при транспортировке и укладке груза служит фиксирующая планка 12, предотвращая самопроизвольное расхождение двуплечих рычагов 1. Устройство рифлеными, губками 13 и фиксаторами 9 контактирует с пакетированным грузом.
Фиксиру слцая планка 12 через одно из установочных отверстий 14 посредством соединительного пальца 15 шар- нирно связана с одним из двуплечих рычагов 1, выступающая часть планки 12 проходит через паз 16 второго захватного рычага 1. На выступающей части планки 12 шарнирно закреплен эксцентриковый зажимной сектор 17 с рукояткой 18.
Цилиндры 3 (фиг.5) выполнены с боковыми от верстиям я 19.
Устройство работает следующим образом.
В стадии захвата и транспортировки двуплечие рычаги 1 заведены по обе
стороны пакетированного груза и контактируют с ним при помощи рифленых губок 13, которые самоустанавливаются на цапфах относительно груз.а. Шток 11, подвижная пята 10 и фиксатор 9 под действием соответствующих пружин 6 и.8 находятся в крайнем вьщвинутом положении, при этом фиксатор 9 на определенную величину заходит под нижнюю кромку пакетированного груза, предотвращая самопроизвольное смещение его относительно рифленых губок 13 при транспортировке ив начальный момент контакта захвата с приемной площадкой, кроме-того, в этом крайнем нижнем положении штанги 5 рабочая среда из полости вертикальных направляющих 2 возвращается во внутреннюю через боковые отверстия .19, которые открыты только в этом крайнем положении штанги 5...
При захвате пакета предварительно определяется положение соединительного пальца 15 относительно установочных отверстий 14 планки 12. Эксцентриковый зажимной сектор 17 отводится в сторону от двуплечего рычага 1 на величину, обеспечивающую поворот двуплечих рычагов 1 на угол, требуемый для захвата пакета. После сведения двуплечих рычагов 1 эксцентриковый зажимной сектор 17 поворачивается и посредством рукоятки 18 производит зажим двуплечих рычагов 1 с пакетом, возможная связь рукоятки 18 с грузом обеспечивает самозаклинивание эксцентрикового зажимного сектора 17 от веса пакета. Если при транспортировке груза произойдет обрыв одной из строп, связывающих двуплечие рычаги 1 с подъемной машиной, груз не.упадет.
В начальный момент контакта с приемной площадкой под действием веса и силы инерции пакетированного груза подвижная пята 10 вдвинется до упора в штангу 5, воздействуя при этом на фиксатор 9, который также вдвинется в в штангу 5, сжав пружину 8, а пружина 6 во время сжатия пружины 8 остается в первоначальном положении, поскольку имеет большую жесткость и сопротивление перемещению штанги 5 из-за наличия рабочей среды намного больше сопротивления перемещению подвижной пяты 10. Когда подвижная пята 10 упрется в штангу 5 усилие от веса пакетированного груза заставит перемещаться
5158
штангу 5, которая сжимает при своем перемещении пружину 6 и вытесняет из цилиндра 3 через дроссельное отверстие А в вертикальную направляющую 2 рабочую среду. При атом скорость па- кетированного груза равна скорости перемещения штанги 5 и пропорциональна расходу рабочей среды через дроссельное отверстие 4. Регулировочньй болт 7 установлен в такое положение, при котором скорость опускания пакетированного груза при укладке его на грузоприемную площадку без прокладок удовлетворяет требованиям надежной безударной разгрузки пакетов с легкобьющимся грузом.
.Формула изобретения
Грузозахватное устройство, содержащее перекрывающие двуплечие рычаги, верхние плечи которых кинематически
5
,0
0
16
связаны с подвеской для крюка подъемной машины, а нижние выполнены с вертикальными направляющими, расположен- ные в них штанги с опорными элементами на нижних концах для контакта с грузовой площадкой и зажимные губки, жестко закрепленные на нижних плечах рычагов, отличающееся тем, что, с целью расширения эксплуатационных возможностей путем обеспечения, сохранности груза.при разгрузке, оно снабжено цилиндрами с рабочей средой, выполненными с регулируемыми дроссельными отверстиями на боковой поверхности, расположенными в вертикальных направляющих соосно им с диаметральным зазором, и охватывающими верхние части штанг, выполненных со штоками на верхних концах и подпружиненных в вертикальной плоскости относительно нижних плеч двуплечих рычагов.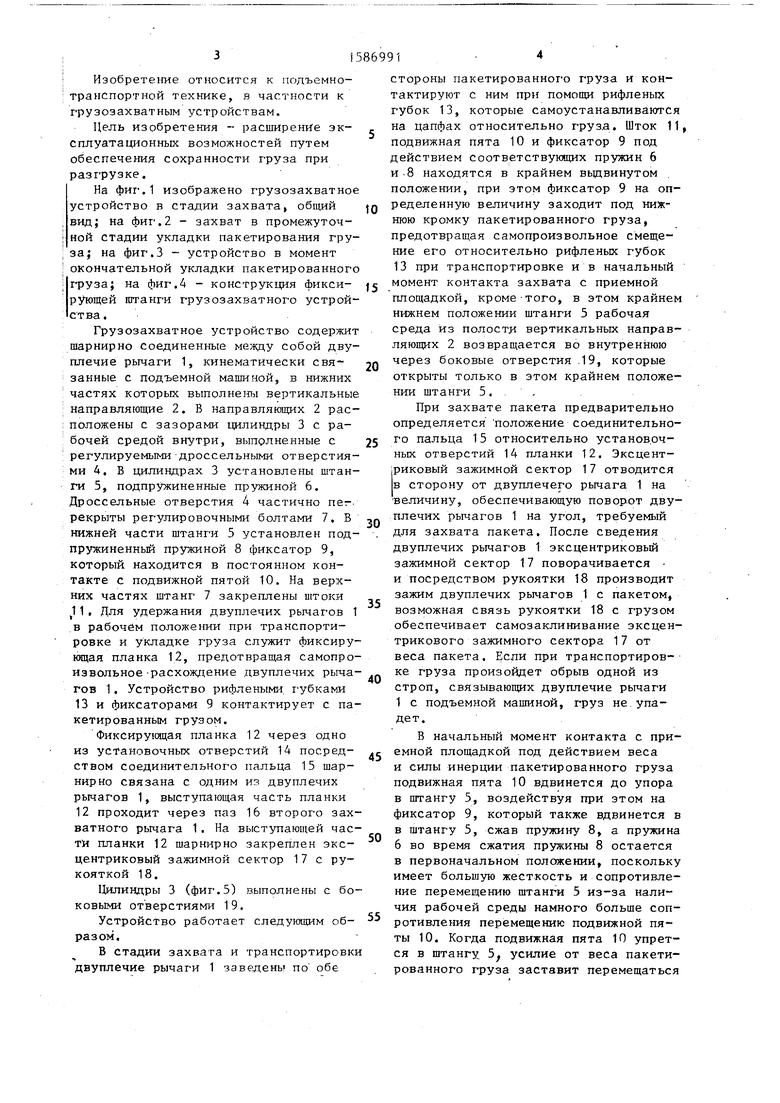
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1982 |
|
SU1066931A1 |
| Пакетодержатель кирпича | 1989 |
|
SU1673462A2 |
| Вилочный захват для пакетированных грузов | 1983 |
|
SU1152914A1 |
| Захват для пакетированных грузов с отверстиями | 1988 |
|
SU1728117A1 |
| Грузозахватное устройство | 1986 |
|
SU1399251A1 |
| Грузозахватное устройство | 1990 |
|
SU1787924A1 |
| Автоматический захват | 1971 |
|
SU537020A1 |
| Захват-кантователь | 1988 |
|
SU1588689A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2011 |
|
RU2463239C1 |
| ВИЛОЧНЫЙ ЗАХВАТ ДЛЯ ПАКЕТИРОВАННЫХ ГРУЗОВ | 1969 |
|
SU233858A1 |
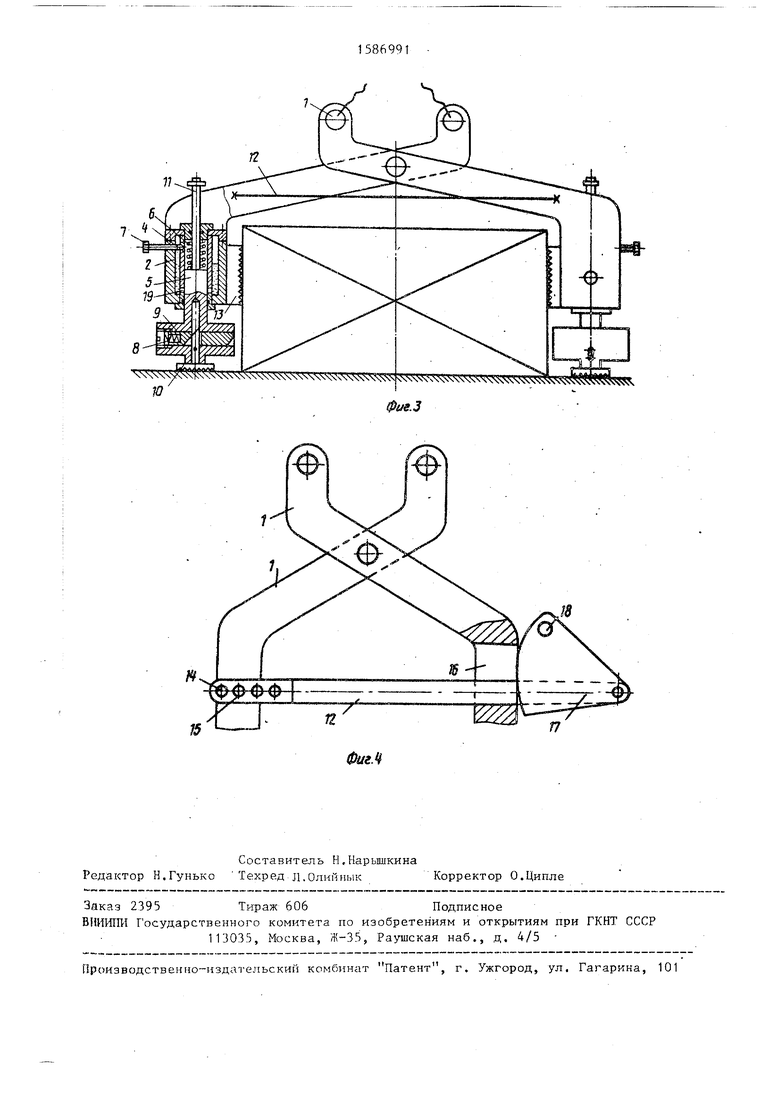
Изобретение относится к подъемно-транспортному оборудованию, в частности к грузозахватный устройствам. Целью изобретения является расширение эксплуатационных возможностей путем обеспечения сохранности груза при разгрузке. Грузозахватное устройство содержит двуплечие рычаги 1 с зажимными губками 13 и вертикальными направляющими 2, в которых с зазором установлены цилиндры с рабочей средой, соединенные с полостями вертикальных направляющих дроссельными отверстиями 4. В цилиндрах 3 установлены штанги 5 с опорными пятами 10 и фиксаторами 9. 4 ил.
72
Фиг г
| Захват-кантователь | 1975 |
|
SU534411A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
