Изобретение относится к подъемно- тр экспортной технике, в частности к захват- ньм устройствам.
Известно захватное устройство г,/ы гру- зоз с отборт овкой, на раме которого шар- HV рно закреплены захватные рычаги, веэхние плечи которых связаны посредством тяг с элементами навески на крок грузоподъемной машины, кроме того на раме подвижно установлен ползун механизма фиксации захватных рычагов в раскрытом положении,
I Однако, данное устройство имеет сложную конструкцию, большое число взаимно перемещающихся элементов и узлов.
Наиболее близким по технической сущ- но;сти является захват для цилиндрических грузов, включающий корпус с монтажной петлей и поворотными крюками, центрирующие пластины и перемещающийся по корпусу фиксатор, взаимодействующий с ра бочей гранью крюка, пневматическое оборудование для перемещения фиксатора.
Недостатками устройства являются повышение затрат на технический уход, сложность конструкции, недостаточная надежность и сезонность работы за счет использования пневматического оборудования; невозможность использования захвата для грузов с различными типоразмерами захватываемой части цилиндрических грузов из-за жесткого крепления пластин центратора на наружной поверхности фиксатора; высокое усилие. раскрытия крюков - за счет формы и взаимного расположения крюков и фиксатора.
Цель изобретения - повышение надежности работы устройства.
Указанная цель достигается тем, что в захватном устройстве, содержащем цилиндрический корпус с монтажной петлей на верхнем торце и с шарнирно закрепленными и радиально размещенными на нижнем конце Корпуса двуплечими рычагами, выполненными с рабочими подхватными выступами на Нижних плечах на внутренней по
ел С
X О Ю О О СО
отношению к вертикальной оси симметрии корпуса стороне, и фиксирующее устройство двуплечих рычагов, включающее центрирующий элемент, кольцо и обойму, установленную на корпусе с возможностью перемещения относительно него и связанную с кольцом, установленным с возможностью взаимодействия с верхними плечами двуплечих рычагов, снабжено закрепленным на верхнем конце корпуса блоками, связанными посредством тросов с обоймой, при этом центрирующий элемент представляет собой наконечник, прикрепленный к нижнему торцу корпуса и регулируемый гуэ высоте относительно рабочих подхватных выступов двуплечих рычагов, верхние плечи которых наклонены к вертикальной оси симметрии корпуса, а концы нижних плеч - от вертикальной оси симмет0ии корпуса с возможностью взаимодействия с кольцом.
Сопоставительный анализ с прототипом, показывает, что заявляемое захватное устройство отличается тем, что оно снабжено закрепленными на верхнем конце корпуса блоками, связанными посредством тросов с обоймой, при этом центрирующий элемент представляет собой наконечник, прикрепленный к нижнему торцу корпуса и регулируемый по высоте относительно рабочих подхватных выступов двуплечих ры- чаггв, верхние плечи которых наклонены к вертикальной оси симметрии корпуса, а концы нижних плеч - от вертикальной оси
симметрии корпуса с возможностью взаимодействия с кольцом.
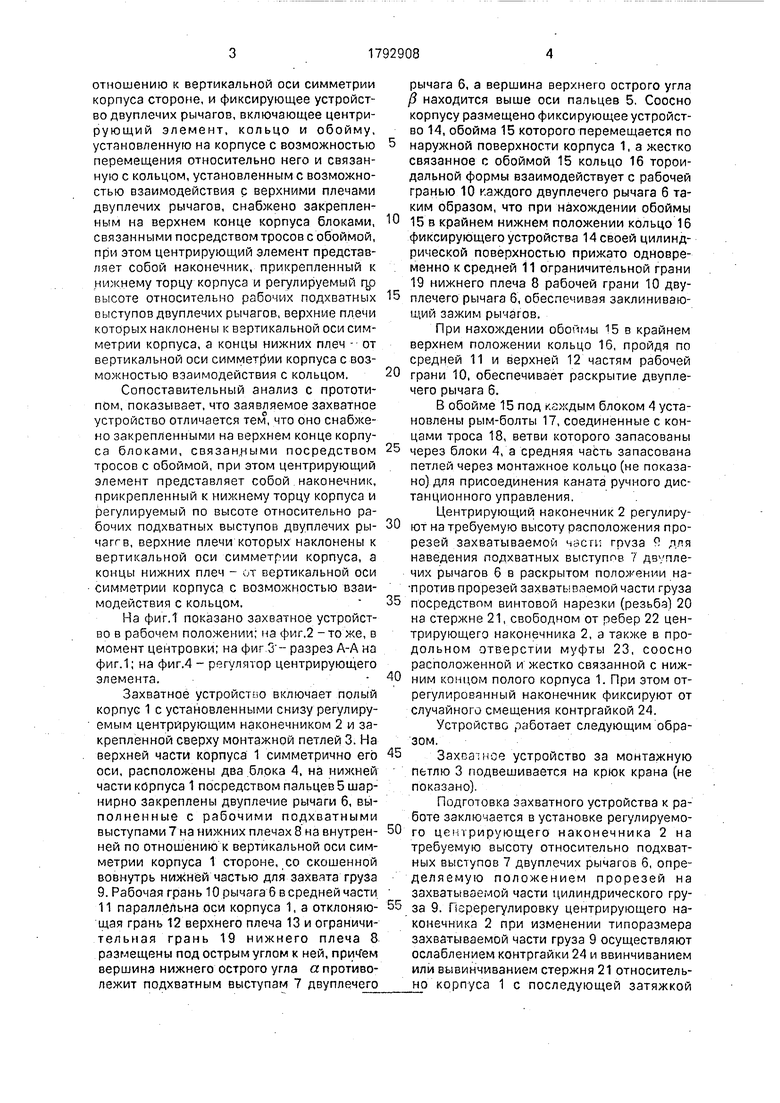
На фиг.1 показано захватное устройство в рабочем положении; на фиг.2 -тоже, в момент центровки; на фиг.З - разрез А-А на фиг.1; на фиг.4 - регулятор центрирующего элемента.
Захватное устройство включает полый корпус 1 с установленными снизу регулиру емым центрирующим наконечником 2 и закрепленной сверху монтажной петлей 3. На верхней части корпуса 1 симметрично его оси, расположены два блока 4, на нижней части корпуса 1 посредством пальцев 5 шар- нирно закреплены двуплечие рычаги 6, выполненные с рабочими подхватными выступами 7 на нижних плечах 8 на внутренней по отношению к вертикальной оси симметрии корпуса 1 стороне, со скошенной вовнутрь нижней частью для захвата груза 9. Рабочая грань 10 рычага б в средней части 11 параллельна оси корпуса 1, а отклоняющая грань 12 верхнего плеча 13 и ограничительная грань 19 нижнего плеча 8 размещены под острым углом к ней, примем вершина нижнего острого угла а противолежит подхватным выступам 7 двуплечего
рычага 6, а вершина верхнего острого угла / находится выше оси пальцев 5. Соосно корпусу размещено фиксирующее устройство 14, обойма 15 которого перемещается по
наружной поверхности корпуса 1, а жестко связанное с обоймой 15 кольцо 16 тороидальной формы взаимодействует с рабочей гранью 10 каждого двуплечего рычага б таким образом, что при нахождении обоймы
15 в крайнем нижнем положении кольцо 16 фиксирующего устройства 14 своей цилиндрической поверхностью прижато одновременно к средней 11 ограничительной грани 19 нижнего плеча 8 рабочей грани 10 дву5 плечего рычага 6, обеспечивая заклинивающий зажим рычагов.
При нахождении обоймы 15 в крайнем верхнем положении кольцо 16, пройдя по средней 11 и верхней 12 частям рабочей
0 грани 10, обеспечивает раскрытие двуплечего рычага 6.
В обойме 15 под каждым блоком 4 установлены рым-болты 17, соединенные с концами троса 18, ветви которого запасованы
5 через блоки 4, а средняя часть запасована петлей через монтажное кольцо (не показано) для присоединения каната ручного дистанционного управления.
Центрирующий наконечник 2 регулиру0 ют на требуемую высоту расположения прорезей захватываемой чзсги груза Ч для наведения подхватных выступов 7 двуплечих рычагов 6 в раскрытом положении на- противпрорезей захватываемой части груза
5 посредством винтовой нарезки (резьба) 20 на стержне 21, свободном от ребер 22 центрирующего наконечника 2, а также в продольном отверстии муфты 23, соосно расположенной и жестко связанной с ниж0 ним концом полого корпуса 1. При этом отрегулированный наконечник фиксируют от случайного смещения контргайкой 24.
Устройство работает следующим образом.
5 Захватное устройство за монтажную петлю 3 подвешивается на крюк крана (не показано).
Подготовка захватного устройства к работе заключается в установке регулируемо0 го центрирующего наконечника 2 на требуемую высоту относительно подхватных выступов 7 двуплечих рычагов 6, определяемую положением прорезей на захватываемой части цилиндрического гру5 за 9. Перерегулировку центрирующего наконечника 2 при изменении типоразмера захватываемой части груза 9 осуществляют ослаблением контргайки 24 и ввинчиванием или вывинчиванием стержня 21 относительно корпуса 1 с последующей затяжкой
контргайки 24. При этом изменение типоразмера захватываемой части груза У допускается только по высоте без изменения размеров ее поперечных сечений для каж- о конкретного захватного устройства, Затем усилием, передаваемым на трос 18 через монтажное кольцо для присоединения каната ручного дистанционного управления (не показано), за счет вращения пары блоков 4 производят подъем обоймы
до
15 ус
концами троса 18.
При подъеме обойма 15 перемещается
фиксирующего устройства 14, в которой ановлены рым-болты 17, соединенные с
наружной поверхности корпуса 1, а жес- i связанное с обоймой кольцо 16 тороипотк
дапьной формы перемещается по рабочей гр ши двуплечего рычага 6. Пройдя среднюю часть 11 рабочей грани 10, кольцо 16
чинает взаимодействовать с отклоняю- щей гранью 12 верхнего плеча 13. При достижении обоймой 15 крайнего верхнего положения на корпусе 1 кольцо 16 взаимодействует с отклоняющей гранью 12 верхне- го.плеча 13, обеспечивая полное раскрытие дв/плечих рычагов 6. За счет расположения вечиины острого угла /Зеыше оси пальца 5, посредством которого двуплечий рычаг б кр злится в корпусе 1, снижается усилие рас- крзгтия двуплечего рычага 6 по мере подъ- ема фиксирующего устройства 14. Устройство готово к работе. При опускании устройства, укрепленного за монтажную петлю 3 на крюке.крана (не показано), раскрытые двуплечие рычаги 6 со скошенной вовнутрь нижней частью пред- ваэительно устанавливают на захватываемую- часть груза 9, центрирующий на онечник 2 ориентируется и точно устазливается на. центральное отверстие за- хв ггываемой части груза 9, При этом за счет
пр
НУ
едварительного регулирования наконечника 2 по высоте подхватиые выступы 7 дв/плечего рычага 6 в раскрытом положел располагаются напротив прорезей за-
хв.атываемой части груза 9.
При снятии усилия, передаваемого поcp
здством троса 18 на обойму 15, фиксируюцее устройство 14 начинает пе эемещаться по корпусу 1 вниз под дейст- ви зм собственного веса. При этом кольцо 16 перемещается по отклоняющей грани 12
0
5
0 5 0 5
0
5
0
верхнего плеча 13. Пройдя линию сопряжения верхнего плеча 13 и средней 11 части рабочей грани 10, противолежащую верхнему острому углу р, кольцо 16 обеспечивает плавный поворот двуплечего рычага 6 относительно пальца 5 и полный заход подхват- ного выступа 7 в прорезь захватываемой части груза 9.
Перемещение обоймы 15 по корпусу 1 при достижении крайнего нижнего положения заканчивается, когда кольцо 16 устанавливается на линии сопряжения средней части рабочей грани 10 и ограничительной грани нижнего рычага 19. При этом кольцо 16 своей цилиндрической поверхностью плотно прижимается к рабочей грани 10, а вершина острого угла а находится в одной плоскости с подхватными выступами 7 двуплечих рычагов 6 и кольцом 16 фиксирующего устройства 14, что обеспечивает рабочее заклинивание двуплечих рычагов 6 и надежную фиксацию груза.
После подъема и перемещения груза производят ручное дистанционное отсоединение захватного устройства за счет повто- рения операций, соответствующих подготовке захватного устройства к работе,
Далез цикл работы повторяется.
При изменении типоразмера захватываемой части груза осуществляют перерегулировку центрирующего наконечника 2.
Использование трособлочной системы для автоматического соединения с грузом и ручного дистанционного отсоединен;п при исключении пневматического оборудования обеспечивает удешевление и упрощение устройства и его технического обслуживания; выполнение рычагов со скошенной вовнутрь нижней частью обеспечивает быстрое предварительное улавливание захватываемой части груза, что сокращает .также время окончательного ориентирования центрирующего наконечника для точной установки захватного устройства - все это позволяет повысить надежность работы.. . , .
Конструктивное выполнение и взаимное расположение элементов устройства в соответствии с признаками изобретения также обеспечивает повышение надежности работы.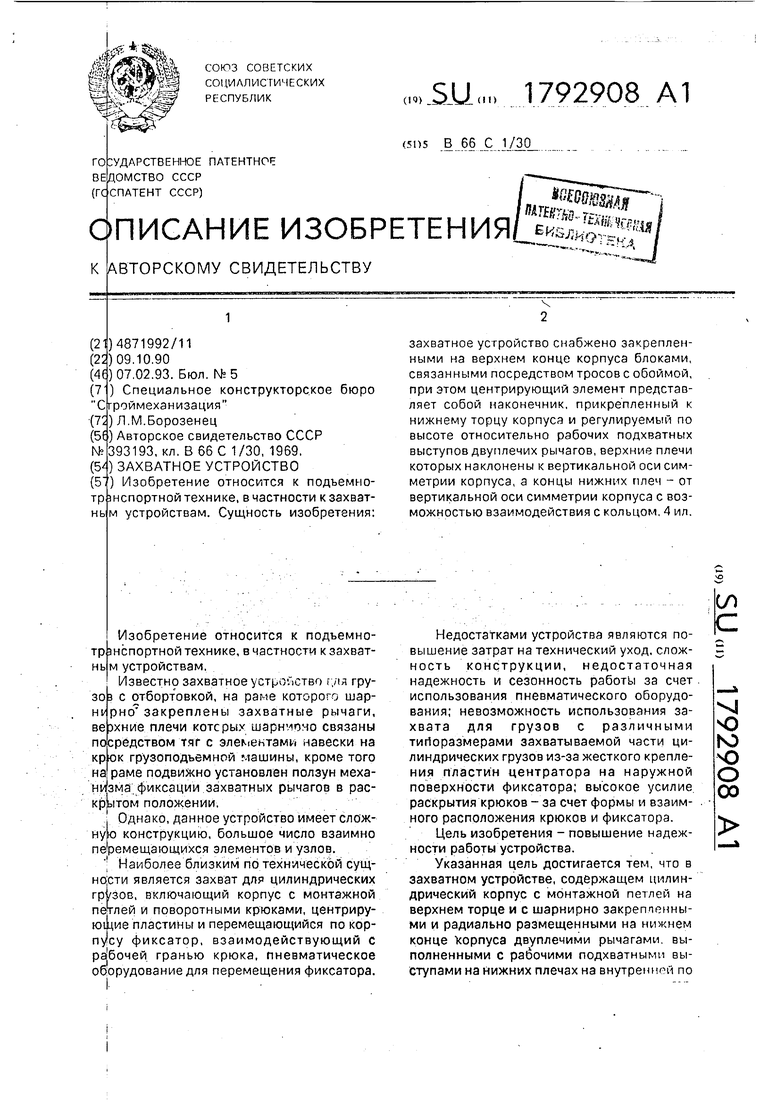

| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для вертикально расположенных грузов | 1983 |
|
SU1129169A1 |
| Захватное устройство для штучных грузов | 1989 |
|
SU1765096A1 |
| Захватное устройство | 1982 |
|
SU1055721A1 |
| ЗАХВАТ-КАНТОВАТЕЛЬ ДЛЯ ГРУЗОВ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ С ЦЕНТРАЛЬНЫМ ОТВЕРСТИЕМ | 1994 |
|
RU2116239C1 |
| ТРАВЕРСА ДЛЯ ЗАХВАТА ПАКЕТА ШПАЛ | 2008 |
|
RU2376235C1 |
| Захватное устройство для изделий с центральным отверстием | 1988 |
|
SU1557059A2 |
| Устройство для захвата труб | 1985 |
|
SU1393764A1 |
| АВТОМАТИЗИРОВАННОЕ ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2004 |
|
RU2268229C1 |
| Захватное устройство для грузов с монтажными петлями | 1988 |
|
SU1533982A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ГРУЗОВ | 1993 |
|
RU2072958C1 |
Формула изобретения
Захватное устройство, содержащее корпус с монтажной петлей на верхнем конце, шг рнирно закрепленные и радиально раз-
мещенные на нижнем конце корпуса дву-. плечие рычаги, выполненные с рабочими подхватными выступами на нижних плечах на внутренней по отношению к вертикальной оси симметрии корпуса стороне, и фиксирующее устройство двуплечих рычагов, включающее обойму, установленную на корпусе с возможностью перемещения относительно него, центрирующий элемент и кольцо, установленные с возможностью взаимодействия с верхними плечами двуплечих рычагов, отличающееся тем, что, с целью повышения надежности, оно снабжено закрепленными на верхнем конце корпуса блоками, связанными посредством
тросов с обоймой, при этом центрирующий элемент представляет собой наконечник, прикрепленные к нижнему торцу корпуса и регулируемый по высоте относительно рабочих п одхватных выступов двуплечих рычагов, верхние плечи которых наклонены к вертикальной оси симметрии корпуса, а концы нижних плеч - от вертикальной оси симметрии корпуса с возможностью взаимодействия с кольцом.
