допустимое значение величины устэ - лостных повреждений передаточного механизма, определяют текущую величи ну работы электропривода и постоянно сравнивают ее с заранее заданной величиной, определяют величину усталосных повреждений передаточного механизма за интервал времени, в течение которого текущее значение работы электропривода становится равным заранее заданной величине, и если в момент времени, когда текущее значение работы становится равным заранее заданной величине, накопленные усталостные повреждения передаточного механизма не превышают допустимой величины, значение величины уставки тока отсечки увеличивают, а если накопленные усталостные повреждения превышают допустимую величину, значение уставки тока отсечки уменьща- ют.
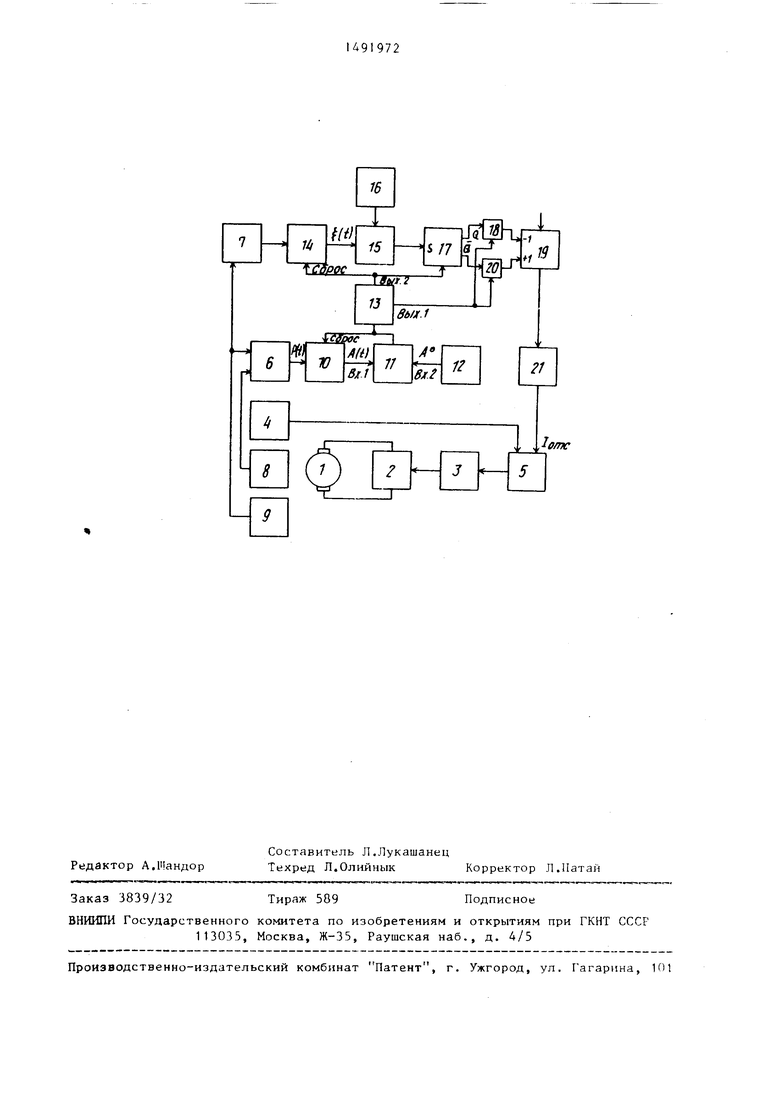
Устройство, реализующее предлагаемый способ, содержит приводной электродвигатель 1 постоянного тока, преобразователь 2 с системой 3 управления, датчик 4 тока, звено 5 ограничения тока, блок 6 умножения, блок 7 измерения усталостного повреждения передаточного механизма, датчик 8 скорости, датчик 9 момента, интегратор 10, первый компаратор 11, источник 12 опорного напряжения, формирователь 13 импульсов, сумматор 14, второй компаратор 15, источник 16 опорного сигнала, триггер 17, первый ключ 18, реверсивный счетчик 19, второй ключ 20, цифроаналоговый преобразователь 21.
Электродвигатель 1 подключен к преобразователю 2, снабженному системой 3 управления, соединенной с датчиком 4 тока через звено 5 ограни- чения. Выход датчика момента 9 соединен с входом блока 7 измерения усталостного повреждения передаточного механизма и с первым входом блока 6 умножения, к второму входу которого подключен датчик В скорости Вход блока 6 умножения соединен с входом интегратора 10, выход которого подключен к первому входу первого компаратора 11, а второй вход соединен с источником 12 опорного напряжения. Выход первого компаратора соединен со сбросом интегратора 10 и входом формирователя 13 импульсов. Выход блока 7 измерения усталостного
5
0
5
0
5
0
5
0
5
повреждения соединен с входом сумма-ч тора 14, выходом подключенного к первому входу второго компаратора 15, всорой вход которого подключен к источнику 16 опорного сигнала. Выход компаратора 15 подключен к S-входу триггера 17, а второй выход формирователя импульсов 13 - к R-выходу триггера 17 и к сбросу сумматора 14, при этом прямой выход тригтера 17 через nepBbDi ключ 18 соединен с вычитающим входом счетчика 19, а инверсный выход через второй ключ 20 - с суммирующим входом счетчика 19. Управляющие входы ключей 18 и 20 подключены к первому выходу формирователя 13 импульсов. Цифроаналоговьй преобразователь 21, подключенный пиф- ровым входом к выходу счетчика 19, соединен с управляющим входом звенп 5 ограничения.
На структурной схеме обозначено;
А - заданная работа;
- допустимое усталостное повреждение;
т М
ijj-r начальное значение установки тока отсечки;
P(t) - текущее значение мощности приводного двигателя;
A(t) - текущее значение работы, совершаемой приводом;
Q - прямой выход триггера;
О - инверсный выход триггера;
Устройство, реализующее способ, работает следующим образом.
При включении устройства на счетчике 19 устанавливается начальное значение установки тока отсечки IOTC « которое преобразуется в аналого вый сигнал с помощью ЦАП 21 и подается на управляющий вход звена 5 ограничения тока. По сигналам датчиков скорости 8 и момента 9 в блоках 6 умножения и измерения усталостного повреждения 7 осуществляется определение мощности P(t), развиваемой приводным двигателем 1, и интенсивности усталостного повреждения передаточного механизма.
Текущее значение мощности P(t) интегрируется интегратором 10, и значение работы A(t), соверщаемой приводом, сравнивается в первом компараторе I1 с заданным с помощью источника 12 опорного напряжения значением работы А° . При условии A(t)«: А на выходе компаратора формируется импульс напряжения, которым значение
51
p;j6oii.i A(t:) на выходе интегратора 10 сбрасынлется до О, а по фронту и cpeiy этого импульса соответственно на первом и втором выходах формирователя 13 формируются два напряже- НИН. Текущие значения усталостного повреждения элементов привода, определяемые в блоке 7, аккумулируются в сумматоре 14, и их сумма сравнива- ется во втором компараторе 15 с допустимым при выполнении работы А уровнем усталостного повреждения механизма. В случае, если за время выполне-
о
ния приводом работы А накопленное значение повреждения (t) не превысило f , сигнал на выходе второго компаратора 15 не формируется, триггер I7 остается в исходном положении (выходы () О, Q 1) и при появлении на первом выходе формирователя 13 импульсов импульса напряжения, открывающего ключи 18 и 20, значение
-г и
уставки тока отсечки Ip-fc установленное в счетчике 19, увеличивается на единицу младшего разряда. Импульсом напряжения с второго выхода формирователя 13 импульсов (сформиро- ванным по срезу сигнала первого компаратора 11) осуществляется сброс значения усталостного повреждения f(t), накопленного в сумматоре 14, и установка триггера 17 в исходное состояние (Q О, О 1). Если за . время выполнения работы А° механические элементы привода получали повреждение (t) , в этом случае на выходе второго компаратора 15 появляется сигнал, перебрасывающий триггер 17 в состояние (Q 1, Q О) и при открывании ключей 18 и 20. Значение уставки тока отсечки, хранящееся в счетчике 19, уменьшается на единицу младшего двоичного разряда.
Таким образом, при тяжелых режимах работы, когда пороговое значение величины усталостного повреждения элементов привода (t), определяемое на интервалах времени, необходимых для совершения приводом заданной механической работы А , превышает допустимую величину ° , происходит пошаговое уменьшение значения уставки тока отсечки IOTC . Это приводит к снижению механических перегрузок
привода, а следовательно, и вели
Q
g о
5 о
5
5
726
чины (t) до тех ), .ь . i е чиа- чение не станет меньше и {(t) и не изменит лплк. При режи мах функционирования экскаг.атора, когда за время выполненчя прпьодим работы Л повреждение (t) меньше допустимого °, происходит увеличение уставки тока отсечки, что ведет к увеличению его загрузки, росту мощности P(t), развиваемой приводным двигателем.
Использование изобретения позволит поддерживать расход ресурса уллов передаточного механизма экскаватора пропорционально совершаемой им работе в различных режимах функционирования, сократить время простоя в ремонтах и увеличить производительность экскаватора в целом.
формула изобретения
Сп1К:об управления элек гроприводом постоянного тока , заключающийся в измерении частоты вращения,момента электро- двигателя и его мощности, определении величины усталостных повреждений передаточного механизма и изменении величины уставки тока отсечки, о т - личающийс я тем, что, с целью повышения тс чности управления за счет учета реальной нагруженности электропривода, задают допустимое значение величины усталостных повреждений передаточного механизма, определяют текущую величину работы электропривода и постоян}1О сравнивают ее с заранее заданной величиной, определяют неличину усталостных повреждений передаточного механизма за интервал времени, в течение которого текущее значение работы электропривода становится равным заранее заданной величине, и если в момент времени, когда текущее значение работы становится равным заранее заданной величине, а накопленные усталостные повреждения передаточного механизма не превьш1ают допустимой величины, то значение уставки тока отсечки увеличивают, а если накопленные усталостные повреждения превышают допустимую величину, то значение уставки тока отсечки уменьшают.
Редактор АЛМандор
Составитель Л.Лукашанец
Техред Л.Олийнык Корректор Л.Патан
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1987 |
|
SU1413697A1 |
| СПОСОБ ИМПУЛЬСНОГО РЕГУЛИРОВАНИЯ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2003 |
|
RU2256286C1 |
| Частотно-регулируемый асинхронный электропривод | 1985 |
|
SU1309247A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТА ДОСТИЖЕНИЯ МЕХАНИЧЕСКОГО УПОРА ЭЛЕКТРОПРИВОДОМ С БИПОЛЯРНЫМ ШАГОВЫМ ДВИГАТЕЛЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2713224C1 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
| СПОСОБ ИМПУЛЬСНОГО РЕГУЛИРОВАНИЯ ЭЛЕКТРОДВИГАТЕЛЕЙ ПОСТОЯННОГО И ПЕРЕМЕННОГО ТОКА | 2009 |
|
RU2430462C1 |
| Система адаптивного управления металлорежущим станком | 1981 |
|
SU996997A1 |
| Способ стабилизации толщины изоляции кабеля и устройство для его реализации | 1982 |
|
SU1302248A1 |
| Устройство для релейно-импульсного регулирования тока тягового электродвигателя транспортного средства | 1988 |
|
SU1572849A1 |
| Непосредственный преобразователь частоты с широтно-импульсным регулированием выходного напряжения | 1983 |
|
SU1107249A1 |
Изобретение относится к управлению электроприводами постоянного тока, а именно к управлению приводами экскаваторов, и может быть использовано в других промышленных механизмах (М) с нестационарными случайными нагрузками. Цель изобретения - повышение точности управления за счет учета реальной нагруженности электропривода. При управлении электроприводом, содержащим электродвигатель (ЭД) и передаточный М, измеряют частоту вращения ЭД, его момент и мощность. Задают допустимое значение величины усталостных повреждений передаточного М, определяют величину работы, совершаемую ЭД, и постоянно сравнивают ее с заранее заданной величиной. Определяют величину усталостных повреждений М редуктора за интервал времени, в течение которого текущее значение работы ЭД становится равным заранее заданной величине. В момент равенства этих величин сравнивают величину накопленных усталостных повреждений с заранее заданной допустимой величиной. Если при этом величина накопленных усталостных повреждений не превышает допустимой величины, то значение уставки тока отсечки ЭД увеличивают. Если накопленная величина превышает допустимую, то значение уставки тока отсечки уменьшают. 1 ил.
Заказ 3839/32
Тираж 589
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина, 101
Подписное
| 0 |
|
SU84615A1 | |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ управления копающим механизмом экскаватора и устройство для его осуществления | 1980 |
|
SU901417A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
