1
Изобретение относится к управлению горной техникой, а именно к управлению механизмами одноковшовых экскаваторов, оснащенных электроприводами постоянного тока и может быть также использовано в других промышленных механизмах с нестационарными случайными нагрузками, например в камнерезных машинах, дробилках и мельницах, сельскохозяйственных машинах.
Известен способ управления копающим механизмом экскаватора, заключающийся в том, что измеряют якорный ток приводного двигателя, сравнивают его с заданной величиной тока отсечки в случае, когда якорный ток превосходит значение тока отсечки, уменьшают скорость вращения двигателя пропорционально указанному превышению 1 .
Недостатком известного способа управления является то, что он явля ется малоэффективным при управлении
механизмами с нестационарными случайными нагрузками, например, при управлении копающим механизмом экскаватора в известном способе управления заданная величина тока отсечки является постоянной и определяется при проектирований для расчетного режима работы механизма. Однако условия эксплуатации экскаваторов отличаются большим разнообразием, что
10 главным образом связано с неоднородностью разрабатываемого грунта, сменой технологических операций и различием в приемах управления у разных машинистов. Поэтому в отдельные
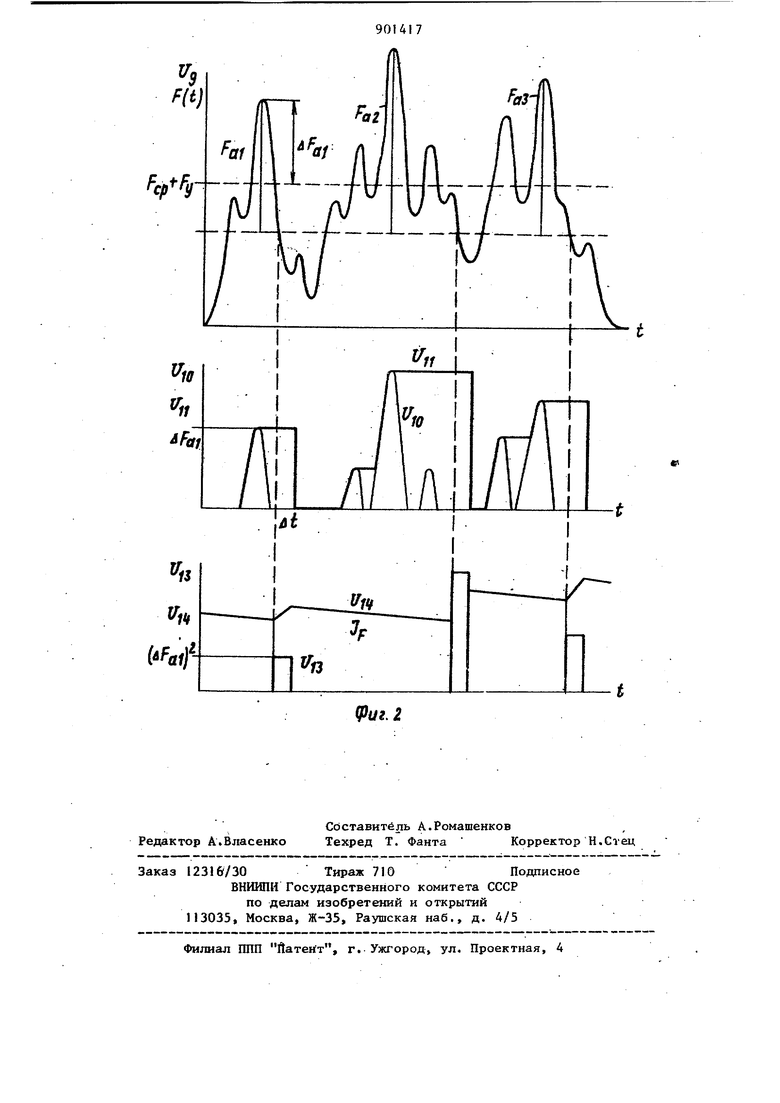
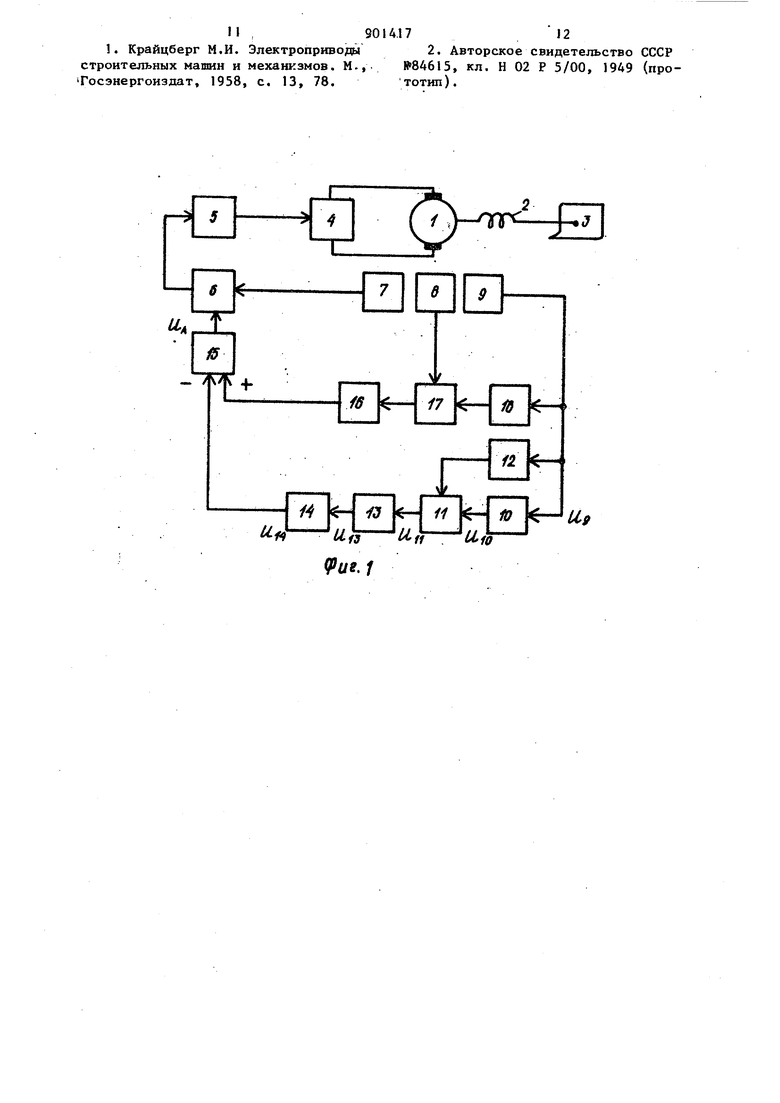
15 периоды работы уровень нагрузок копающего механизма оказывается большим проектного значения, что вызывает ускоренное исчерпание материальных ресурсов механизма и его электро20привода. В других ситуациях нагрузки, наоборот, могут быть в среднем меньшими расчетных, и тогда установленная мощность привода недоиспользу39ется, следовательно, не реализуется возможность сокращения времени черпа ния. Работа в таких режимах вызывает снижение действительной эксплуатационной производительности экскавато pa по сравнению с ее расчетным значением - в первом случае из-за умень шения надежности, что вызывает увеличение времени ремонтов и, следовательно, сокращение времени экскавации, а во втором случае - по причине снижения текущей (часовой) выработки Наиболее близким к предлагаемому техническим решением является способ управления электроприводом, основанный на изменении величины тока отсечки приводного двигателя путем измерения величины якорного тока и сравнении его с заданной величиной и изменении- скорости вращения двигателя пропорциональ.но величине рассогласования. При этом перегрузки привода частично устраняются тем, что, измеряя температуру электрических машин в процессе работы, контрелируют фактический уровень их загруз ки и при перегреве уменьшают величину тока отсечки привода. При таком способе регулирования система управления по сути становится самонастраивающейся, так как она автоматически устанавливает режим работы привода, исходя из условия повышения теплового использования электрических машин Устройство для осуществления указанного способа управления электро приводом содержит приводной двигатель с преобразователем и системой управления, соединенной с датчиком якорного тока через звено огганичения тока . Однако применительно к копающему механизму экскаватора оценка его фактической загрузки по т« 1пературе электрических мапшн, например двигателя, также является малоэффективной Это связано с тем, что в целом показатели надежности механизмов экскаваторов лишь в небольшой мер связан« с термическим старением изоляции обмоток электрических машин. Большую же часть отказов вызывают поломки механического оборудования, и главной их причиной является накоп ление в металле усталостных повреждений под действием нагрузок, возникающих при копании. Кроме того, управление по указанного способу не способствует улучшению характерис74тик режимов, в которых развивается недостаточная мощность копания, поскольку при изменении тока отсечки фактор мощности не учитывается. Целью изобретения является повышение точности и надежности управления копающим механизмом экскаватора. Поставленная цель достигается тем, что измеряют превышение пиковых значений усилия в механизме копания над заданным уровнем, определяют среднеквадратичное .значение указанных превышений, одновременно измеряют величину средней мощности двигателя, определяют разность между средней мощностью двигателя и среднеквадратичным превышением пиковых усилий над заданным уровнем и изменяют величину тока отсечки приводного двигателя, уменьшая ее пои отрицательном значении разности и увеличивая при положительном значении разности . Устройство управления копакяцим механизмом экскаватора снабжено датчиком скорости и усилия, двумя звеньями о граничения j релейным элементом, звеном запоминания максимального значения, квадратором, звеном перемножения между двумя звеньями текущего усреднения и сз мматором-ограничителем, причем датчик усилия через первое звено ограничения соединен со звеном запоминания максимального значения, управляемый вход которого через релейный элемент подключен к датчику усилия, а выход через последовательно соединенные квадратор и первое звено текущего усреднения соединен с первым входом сумматора-ограничителя, второй вход которого через второе звено текущего усреднения подключен к выходу звена перемножения, одним входом соединенным с датчиком скорости, а вторьм через второе звено ограничения - с датчиком усилия, причем выход сумматора-ограничителя связан с управляющим входом звена ограничения тока. На фиг. 1 представлена схема устройства, на фиг. 2 - временная диаграмма, поясняющая его работу. В устройстве управления копающим механизмом экскаватора приводной двигатель I, связанный трансмиссией 2 с ковшом 3, питается от преобразователя 4 с системой 5 управления, соединенной через звено 6 ограничения тока с датчиком 7 якорного тока. 8устройстве управления имеются так же датчик 8 скорости и датчик 9 уси лия. Датчик 9 усилия через первое звеио 10 ограничения соединен со зв ном 1 запоминания максимального зна чения{ управляемый вход которого через релейный элемент 12 подключен к датчику усилия 9, а выход - ко входу квадратора 13. Выход квадрато ра 13 через первое звено 14 текущего усреднения подключен к одному из вхо дов сумматора-ограничителя 15. Второ вход сумматора 15 через второе звено 16 текущего усреднения подключен к выходу звена 17 перемножения,.один вход которого соединен с датчиком 8 скорости, а второй - через второе звено 18 ограничения - с датчиком 9усилия. Суащость способа управления заклю чается в следующем. В процессе функционирования экскаватора непрерьшно производят определение текущих значений двух характеристических величин, с помощью которых оценивается положительный и отрицательный эффекты от работы копающего механизма. Положительный эф фект определяется мощностью копания, поскольку от ее величины прямо зависит текущая производительность машины. Отрицательш 1й эффект выражается в ожидаемом снижении показателей ее надежности при увеличении уровня нагрузок в копающем механизме Текущая средняя мощность Nj., развиваемая двигателем при копании измеряется как произведение скорости движения ковща на усилие в механизме за вычетом суммы сил трения и веса ковша. Загруженность механизма определяется интенсивностью потока перегрузок IP в передачах механизма. При этом поток перегрузок определяет темп исчерпания ресурса прочности по усталости, который пропорционален среднеквадратичному значению превышений Д Fq F- - Fy амплитудных значений FQ отдельных колебаний случайного усилия в механизме F(t) над заданной величиной F,,соответствующей пределу усталости, т.е пропорционален величиной Fq) (FQ у (фйг.2). Амплитудные значения Рд определяются по наибольшему из максимумов усилия f, в интервалах межд двумя его пересечениями (сначала снизу вверх, а затем сверху вниз) среднего значения амплитуд нагрузки, а именно Fg .F)ia)( fcp . поэтому IP (Fcp- Fy) В расчетном режиме, когда ток отсечки привода принят равным установленному проектному значению.можно считать, что |р 1, N N. Отклонение ожидаемой эксплуатационной производительности от ее расчетного значения опред еляется величиной А - Nj) - kjdV - I), где k и k 2. Becoraiie, коэффициенты выражающие меру влияния величин И и I р на указанный общий эффект функционирования копакяцего механизма экскаватора. При работе копающего механизма в расчетном режиме, когда изменения в величину тока отсечки электропривода не вносятся. То же относится и к режимам, не совпадающим с расчетньми, но таким, в которых k(MK - N) k,(l - I), так как в этих случаях увеличение (уменьшение) потока интенсивности перегрузок компенсируется увеличением (уменьшением) мощности копания в от-г ношении их влияния на ожидаемое значение эксплуатационной производительности. В режимах, отличающихся от отказанных, при , величину тока отсечки электропривода изменяют, а именно при его уменьшают, а при А О - увеличивают. При уменьшении тока отсечки привода одновременно уменьшаются поток интенсивности перегрузок I и мощность копания N, так как ток, а следовательно, и вращающий момент двигателя, уже не может достигать прежних максимальных значений. При увеличении тока отсечки величины 1 и Nj по той же причине возрастают. Если в механизме, первоначально работавшем в проектном режиме работы, участились перегрузки, например из-за того, что в грунте начали встречаться участки повышенной прочности или вследствие неправильных действий машиниста, то поток интенсивности перегрузок Jp начинает возрастать, вследствие чего величина А приобретает отрицательный знак, увеличиваясь по абсолютному значению, что приводит к снижению величины тока отсечки привода, а значит величин JP и N. При этом отрицательный эффект от некоторого снижения мощности копания перекрывается положитель7ным эффектом от ожидаемого повышения надежности механизма, которое выража ется в снижении длительности простоев в ремонтах. Тем самым в общем сроке службы экскаватора увеличивает ся доля времени, идущего на выполнение полезной работы, т.е. на экскавацию, а следовательно, повышается эксплуатационная производительность являющаяся главным экономическим показателем функционирования экскавагьра. Если условия копания стали более легкими, то интенсивность перегрузок уменьшается. В этих условиях, наоборот, можно, не опасаясь механических повреждений, увеличить ток отсечки в пределах, допустимых по другим ограничениям в приводе, например по условиям коммутации электрических машин. Польза от этого заключается в том, что если допустить большее значение тока, то средняя мощность копания возрастает, что приводит к сокращению времени черпания, а значит, к увеличению текущей и эксплуа тационной производительности экскаватора. Устройство, реализующее способ. управления (фиг.О функционирует ел дующим образец. 5, С помощью датчика 9 усилия и t звеньев 10-14 производится вычисление интенсивности потока перегрузок Jp-6 трансмиссии механизма в соответствии с приведенной выше формулой работы ука.занных звеньев иллюст рируется фиг.2). Для этого сигнал и от датчика 9 подается на первое звено 10 ограничения порог открывания которого выбирается пропорциональным сумме величин и Fy , следовательно выходное напряжение IL соответствует величине ЛР F(t) - (FCP + F,,). Сигнал поступает далее на звено запоминания максимального значения, каким может быть, например, последователь но соединенные диод, резистор и кон денсатор . Фиксация наибольшего значения выходного напряжения li; звена 11 производится до тех пор, пока напряжение U не снизится до величи ны соответствукндей значению F«) и не сработает соответственно настрое ный релейный элемент 12, который подает команду на считывание зафиксированного напряжения, пропорционального величине AFcj {F(.p + 7:8 + Fv). Выходное напряжение U., звена II подается затем на квадратор 13, где оно возводится в квадрат и в виде импульса напряжения U. заданной длительности .t поступает на. первое звено 14 текущего усреднения (им может служить инерционное звено), выходное напряжение 11 которого пропорционально поэтому интенсивности J р (ikF ) перегрузок механизма. После считывания происходит сброс на нуль напряжения U звена 11 , вследствие чего оно оказывается подготовленным к запоминанию следующего максимума. Действием звеньев 16-18 совместно с датчиком 9 усилия и датчиком 8 скорости осуществляется вычисление средней мощности копания. А именно, сигнал от датчика 9 усилия подается на второе звено 18 ограничения, уровень открывания которого соответствует сумме сил трения и веса ковви и поэтому его выходное напряжение пропорциЬнально усилию копания, С помоюд ю звена 17 перемножения оно умножается на напряжение датчика 8 скорости, что дает сигнал, соответствующий мощности копания Nj. Сигнал произведения поступает на второе звено 16 текущего усреднения, выходное напряжение которого даиет меру текущей средней мощности N,, развиваемой двигателем при копании. Напряжение с выхода первого звена 14 усреднения, пропорциональное интенсивности JP потока перегрузки, подается на сумма тор-чэграничитель 15 со знаком минус и направлено на уменьшение тока отсечк-и привода, а выходной сигнал второго звена 16 ограничения, пропорцио яальный средней мощностих-копания N имеет, наоборот, положительную полярность и действует в сторону увеличения тока ,отсечки. Кроме того, статическая характеристика звена 15 формируется так, чтобы при работе в асчетнрм режиме, когда Jp Jpi.H Nt его выходное напряжение было равно нулю. При этом сигнал самонастройки UCK (напряжение на выходе сумматора 16) пропорционален величине А, характеризующей отклонение данного резкима работы от расчетного. В рассматривающемся режиме участившихся перегрузок устройстйо управления работает таким образом. При увеличении интенсивности перегрузок JP сигнал на выходе первого звена 14 текущего усреднения воз растает, вследствие чего выходное напряжение сумматора 15 становится отрицательным. Поступая на управляю щий вход эвена 6 ограничения тока, оно вызывает уменьшение тока отсечки привода. При этом напряжение на выходе звена 6, являющееся сигналом обратной связи по току якоря, появляется при меньшем значении напряже ния датчика 7 тока, вызывая более сильное ограничение яко.рного тока, вращающего момента двигателя 1 и усилия в трансмиссии 2, что, в частности, приводит к уменьшению интенсивности перегрузок J-, Таким образом, в рассматриваемом случае схема управления работает как систе ма автоматического регулирования величиш) J( jf, стремясь поддерживать уровне, близком к расчетному ее на значению J. При переходе механизма в легкий режим работы и уменьшении интенсивности перегрузок напряжение на выходе первого звена 14 текущего усре нения снижается, следовательно, сигнал самонастройки становится положительньм, вызывая увеличение тока отсечки. Максю альное значение выходного напряжения положительного знака сумматора 15 при этом ограничивается, например, с псжощью стаби литрона в цепи обратной связи усилителя, подобным образом ограничива ется выходное напряжение сумматора 15 и при отрицательной его полярнос Таким образом, путем самонастрой ки величины тока отсечки в системе управления приводом копающего механизма осуществляется его адаптация к изменяющимся внешним условиям, повышается точность и надежность отправления копающим механизмом. При этом достигается увеличение ожидаемой эксплуатационной производительности экскаватора либо за счет огра ничения перегрузокi а следовательно повышения надежности, либо вследст.вие сокращения времени черпания. Формула изобретения 1. Способ управления копающим ме ханизмом экскаватора, основа11шлй на изменении величины тока отсечки приводного двигателя пута измер ния величины якорного тока и сравнения его с заданной величиной и изменении скорости вращения двигателя пропорционально величине рассогласования, отличающийся тем, что, с целью повышения точности и надежности управления копающим механизмом экскаватора, измеряют превышение пиковых значений усилия в «texami ie над заданным уровнем, определяют среднеквадратичное значение указанных превышений, одновременно измеряют вели-: чину средней мощности двигателя, определяют разность между.средней мощностью двигателя и среднеквадратичным превьш1е1шем пиковых усилий над заданным уровнем и изменяют величину тока отсечки приводного двигателя, уменьшая ее при отрицательном значении разности и увеличивая при положительном значении разности. 2. Устройство управления копамяцим механизмом экскаватора, содержащее приводной двигатель с преобразователем и системой управления, соединенной с датчиком якорного тока через звено ограничения тока, отличающееся тем, что оно снабжено датчиками скорости и усилия, двумя звеньями ограничения, релейным элементом, звеном запс 4инания максимального значения, квадратором, звеном пера4ноження двумя звеньями текущего усреднения и сумматоромограничител, причем датчик усилия через первое звено ограничения соединен со звеном запоминания максималь- ного значения, управляемый вход которого через релейный элемент подклюнен к датчику усилия, а выход через последовательно соединенные квадратор и первое звено текущего усреднег ния соединен с первым входом сумматора-ограничителя, второй вход которого через второе звено текущего усред-. нения подключен к выходу звена перемножения , одним входом соединенным с датчиком скорости, а вторьм через второе звено ограничения - с датчиком усилия, причем выход сумматораограничителя связан с управляющим входом звена ограничения тока. Источники- информации, принятые во внимание при экспертизе
11,9014,1712
. Крайцберг М.И. Электроприводы2. Авторское свидетельство СССР
строительных машин и механизмов. М.,. №84615, кл. Н 02 Р 5/00, 1949 (проТосэнергоиздат, 1958, с. 13, 78.тотип).
(риг, 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления электроприводом напора экскаватора и устройство для его осуществления | 1986 |
|
SU1430475A1 |
| Устройство для управления копающими механизмами экскаватора | 1981 |
|
SU1076549A2 |
| Способ автоматического управления процессом копания на одноковшовых экскаваторах и устройство для его осуществления | 1981 |
|
SU977623A1 |
| Устройство управления электроприводом копающего механизма экскаватора | 1989 |
|
SU1656084A1 |
| Устройство для управления копающим механизмом экскаватора | 1976 |
|
SU613037A1 |
| Способ ограничения динамических нагрузок копающих механизмов экскаваторов и устройство для его осуществления | 1978 |
|
SU765470A1 |
| Устройство для управления копающими механизмами экскаватора | 1978 |
|
SU749996A1 |
| Устройство для управления процессом копания карьерного экскаватора | 1989 |
|
SU1624097A2 |
| Устройство для управления копающими механизмами экскаватора | 1982 |
|
SU1082916A1 |
| Устройство для управления копающим механизмом экскаватора | 1976 |
|
SU730939A1 |