Изобретение относится к оптико-электронным приборам и предназначено для повышения точности глубины выборки грунта одноковшовым экскаватором, например, при прокладке траншей под канализационные коллекторы, при отрывке магистральных осушительных или оросительных каналов, при подготовке котлованов под укладку фундаментных блоков и т.д. Целью изобретения является повышение производительности экскаватора. На фиг. 1 изображена общая схема устройства; на фиг. 2 - схема индикации. Устройство содержит генератор 1 управляющего луча (прожектор), ковш 2 экскаватора, рукоять 3 экскаватора, стрелу 4 экскаватора, вертикальную штангу 5, основной фотоприемник 6, дополнительный фотоприемник 7, рычаг 8 параллелограмма, кабину 9 экскаватора, усилители 10 и 11, реле 12 и 13, индикаторные лампы 14 и 15, пульт 16 управления. На кабине 9 экскаватора укрепляется ось рычага 8, который вместе со штангой 5 и отрезком 1 стрелы 4 образует параллелограммный механизм, перемещающий установленные на штанге основной 6 и дополнительный 7 приемники пропорционально перемещению конца А стрелы 4, т.е. заглублению ковша 2 (привод перемещения штанги 5 может быть выполнен в виде другого механизма, например ленточного или троссового). При этом вертикальное перемешение приемников 6 и 7 уменьшается в отношении B/L, например, в три раза. Устройство работает следующим образом. При опускании приемника 7 на ось О-О управляющего луча в нем возникает фотосигнал, усиливаемый в усилителе 11 и включающий реле 13, зажигающее сигнальную лампу 15 на пульте 16 управления, предупреждающий оператора о необходимости уменьшись скорость опускания ковша. При дальнейшем опускании ковша, когда основной приемник 6 придет на ось луча, аналогичным образом включается сигнальная лампа 14 для остановки. Если выходы реле 12 и 15 подключить к приводу ковша (фиг. 2), то можно автоматизировать процесс замедления и остановки последнего. Интервал между предварительным сигналом и остановкой ковша .определяется величиной расстояния, а между приемниками может быть установлен в зависимости от инерционных свойств экскаватора и реакции оператора, для чего приемники имеют возможность крепиться в любом месте штанги 5. В связи с редукцией перемещения штанги погрешность лучевой системы также увеличивается в отношении L/E. Таким образом, при принятии L/1 3 увеличенная в три раза погрешность от нечувствительности лучевой системы управления не превзойдет ± 0,4 см на дальности в КО ми ± 1 см на дальности в 200 м.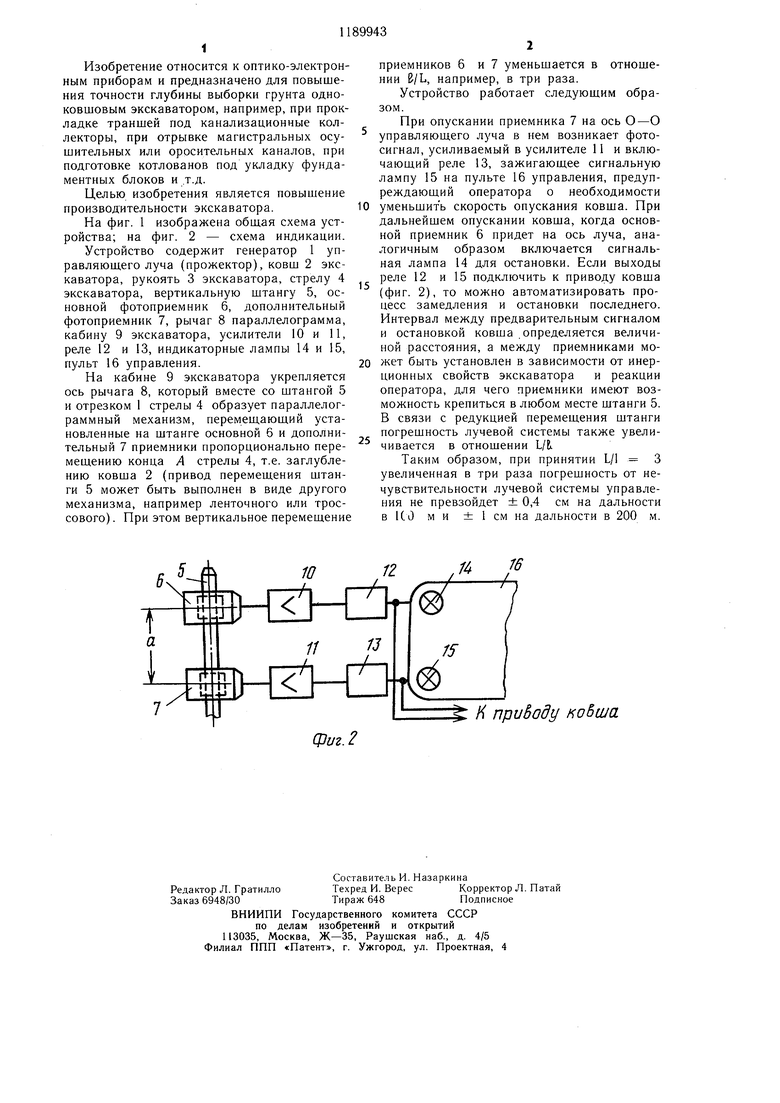
| название | год | авторы | номер документа |
|---|---|---|---|
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР | 2018 |
|
RU2709270C1 |
| ЭКСКАВАТОР ДЛЯ ВСКРЫТИЯ ТРУБОПРОВОДОВ | 2019 |
|
RU2729632C1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР | 2019 |
|
RU2719698C1 |
| Устройство для управления гидравлическим экскаватором | 1989 |
|
SU1778249A1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР с УСТРОЙСТВОМдля | 1971 |
|
SU312924A1 |
| УСТРОЙСТВО ДЛЯ ПОДКОПА ТРУБОПРОВОДОВ | 1998 |
|
RU2170307C2 |
| Система автоматизированного управления процессом рытья одноковшовыми экскаваторами траншей для укладки трубопроводов и инженерных коммуникаций преимущественно с негоризонтальным дном и на участках со склонами | 2017 |
|
RU2683451C2 |
| Одноковшовый гидравлический экскаватор с механизмом эвакуации грунта | 1990 |
|
SU1776721A1 |
| Рабочее оборудование одноковшового экскаватора | 2023 |
|
RU2808751C1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР | 1994 |
|
RU2085662C1 |
I. УСТРОЙСТВО УПРАВЛЕНИЯ ОДНОКОВШОВЫМ ЭКСКАВАТОРОМ, содержащее неподвижно установленный источник оптического излучения и фотоприемник, соединенный с блоком индикации, отличающееся тем, что, с целью повышения /// /// /// /// /// /// /// ф производительности экскаватора, оно снабжено дополнительным фотоприемником и редукционным механизмом, при этом фотоприемники установлены один под другим на редукционном механизме, соединенном с рабочим оборудованием и базой экскаватора, а дополнительный фотоприемник соединен с блоком индикации. 2.Устройство по п. 1, отличающееся тем, что выходы блока индикации соединены с приводом стрелы экскаватора. 3.Устройство по п. 1, отличающееся тем, что редукционный механизм выполнен из двух шарнирно соединенных рычагов, которые шарнирно соединены с рабочим обо рудованием и базой экскаватора и образуют с ними параллелограмм. /// /// /// /// /// /// v/y /// //, 1
Сриг.2
| Цуккерман С | |||
| Т | |||
| и Гридин А | |||
| С | |||
| Управление машинами оптическим лучом | |||
| Л.: Машиностроение, 1969. |
