Изобретение относится к робототехнике и может быть использовано в прецизионных исполнительных механизмах манипуляторов.
Цель изобретения - повышение точности позиционирования за счет исключения влияния сухого трения в опорах привода.
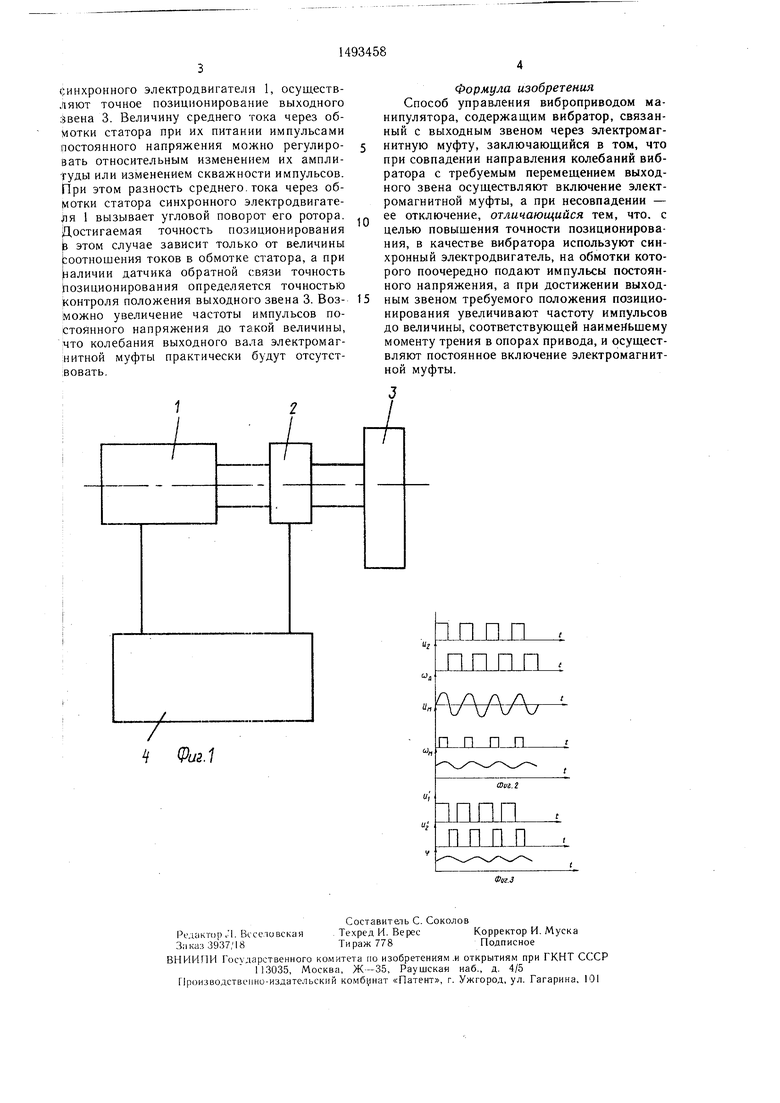
На фиг. 1 показана блок-схема устройства вибропривода; на фиг. 2 - временные диаграммы сигналов управления при грубом позиционировании; на фиг. 3 - то же, при точном позиционировании.
Устройство для реализации предлагаемого способа содержит синхронный электродвигатель 1, связанный через электромагнитную муфту 2 с выходным звеном 3. Обмотки двигателя 1 и муфты 2 подключены к системе 4 управления, например микропроцессорной.
Способ осуществляется следующим образом.
Возбуждают крутильные колебания входного вала электромагнитной муфты 2 синхронным электродвигателем 1. Для этого на обе обмотки статора двигателя 1 поочередно подают импульсы постоянного напряжения U и и2- Вал электродвигателя 1 совершает колебания со скоростью сОд. Если требуется совершить направленное вращение звена 3, то для этого в требуемой фазе движения входного вала муфты 2 включают муфту импульсами напряжения U . Выходной вал электромагнитной муфты 2 вращается со скоростью )„. При достижении звеном 3 зоны позиционирования увеличивают частоту импульсов напряжения (и , V -i) до величины, соответствующей наименьщему моменту трения в опорах привода, при этом амплитуда колебаний вала двигателя мень- ще, чем требуемая погрешность позиционирования. Эффект уменьшения амплитуды колебаний при увеличении частоты импульсов постоянного напряжения объясняется наличием реактивной составляющей сопротивления обмоток статора синхронного двигателя и инерционностью его вала. Одновременно включают электромагнитную муфту 2, подавая на ее обмотку постоянное напряжение и фиксируя между собой ее вход- кой и выходной валы. Затем, изменяя величину среднего тока через обмотки статора
(Л
00 4
сл
00
синхронного электродвигателя 1, осуществляют точное позиционирование выходного 3. Величину среднего тока через обмотки статора при их питании импульсами постоянного напряжения можно регулировать относительным изменением их амплитуды или изменением скважности импульсов. При этом разность среднего.тока через об- Мотки статора синхронного электродвигателя 1 вызывает угловой поворот его ротора. Достигаемая точность позиционирования JB этом случае зависит только от величины Соотношения токов в обмотке статора, а при aличии датчика обратной связи точность Позиционирования определяется точностью контроля положения выходного звена 3. Возможно увеличение частоты импульсов постоянного напряжения до такой величины, что колебания выходного вала электромаг- :нитной муфты практически будут отсутствовать.
5
Формула изобретения Способ управления виброприводом манипулятора, содержащим вибратор, связанный с выходным звеном через электромагнитную муфту, заключающийся в том, что при совпадении направления колебаний вибратора с требуемым перемещением выходного звена осуществляют включение электромагнитной муфты, а при несовпадении - ее отключение, отличающийся тем, что. с целью повыщения точности позиционирования, в качестве вибратора используют сии- хронный электродвигатель, на обмотки которого поочередно подают импульсы постоянного напряжения, а при достижении выходным звеном требуемого положения позиционирования увеличивают частоту импульсов до величины, соответствующей наименьшему моменту трения в опорах привода, и осуществляют постоянное включение электромагнитной муфты.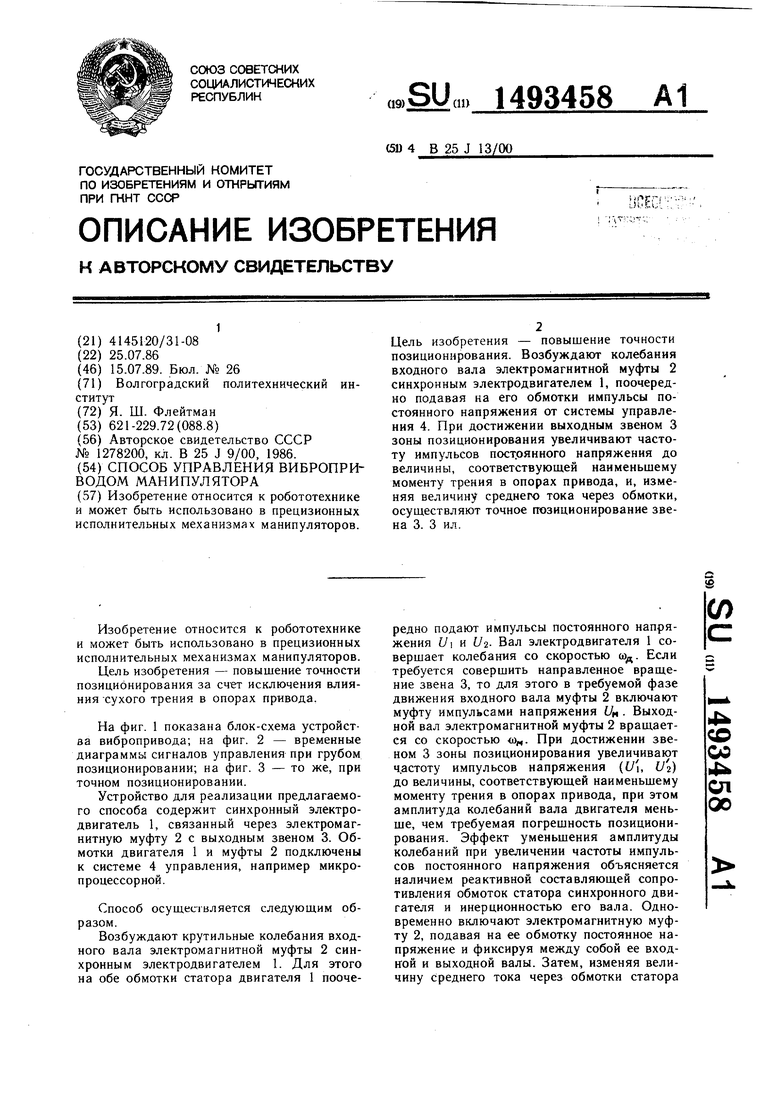
| название | год | авторы | номер документа |
|---|---|---|---|
| МОТОР-РЕДУКТОР С ИНТЕГРИРОВАННЫМ ПРЕЦЕССИРУЮЩИМ ЗУБЧАТЫМ КОЛЕСОМ (ВАРИАНТЫ) | 2013 |
|
RU2538478C1 |
| Устройство для дуговой сварки с поперечными колебаниями сварочной горелки | 1983 |
|
SU1133059A1 |
| Привод микроманипулятора | 1986 |
|
SU1366386A1 |
| СПОСОБ И УСТРОЙСТВО ПУСКА ГАЗОТУРБИННОГО АГРЕГАТА | 2003 |
|
RU2251625C1 |
| КОНЦЕНТРАЦИОННЫЙ СТОЛ | 1995 |
|
RU2085294C1 |
| ТОРЦЕВОЙ ЭЛЕКТРОДВИГАТЕЛЬ С КАЧАЮЩИМСЯ РОТОРОМ | 2019 |
|
RU2720887C1 |
| ВОЗБУДИТЕЛЬ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ | 2008 |
|
RU2440660C2 |
| Устройство для вращения магнит-НОгО диСКА | 1979 |
|
SU801087A1 |
| СПОСОБ ИЗМЕРЕНИЯ МОМЕНТА ИНЕРЦИИ ТЕЛА | 2000 |
|
RU2172936C1 |
| СПОСОБ ЭЛЕКТРОПИТАНИЯ | 2015 |
|
RU2586895C1 |
Изобретение относится к робототехнике и может быть использовано в прецизионных исполнительных механизмах манипуляторов. Цель изобретения - повышение точности позиционирования. Возбуждают колебания входного вала электромагнитной муфты 2 синхронным электродвигателем 1, поочередно подавая на его обмотки импульсы постоянного напряжения от системы управления 4. При достижении выходным звеном 3 зоны позиционирования увеличивают частоту импульсов постоянного напряжения до величины, соответствующей наименьшему моменту трения в опорах привода, и изменяя величину среднего тока через обмотки, осуществляют точное позиционирование звена 3. 3 ил.
/
Фиг.1
Uf
I пп п п
и„
WV
л
v/
и хии-Л
| Способ управления вибрационным приводом манипулятора | 1985 |
|
SU1278200A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
