Изобретен ие относится к конструктивным , элементам и вспомогательным устройствам, для металлообрабатывающих станков, а . именно к захватным устройствам для удержания и перемещения изделий на операциях автоматизированных технологических .;Процессов.
Цель изобретения - расширение технологических возможностей.
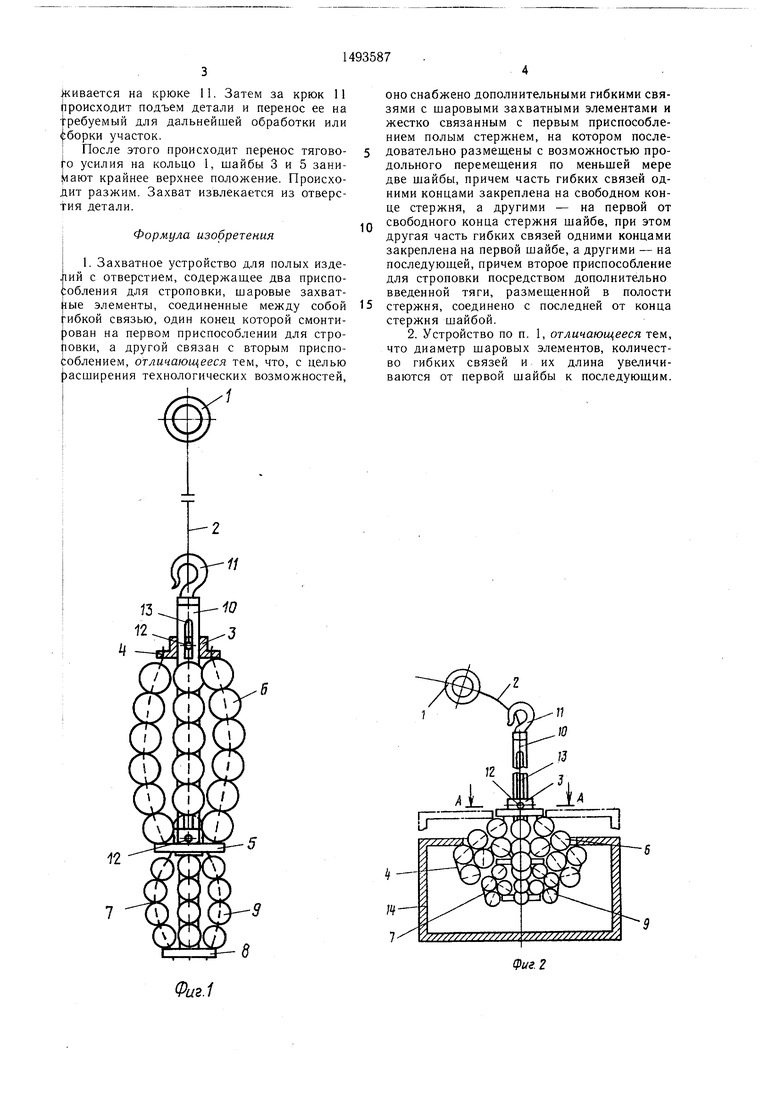
На фиг. I изображен захват в нерабочем состоянии (свободном), общий вид; на фиг. 2 - захват в рабочем положении; на фиг. 3 - разрез А- А на фи1 . 2 (увеличе- .но);.на фиг..4 -- захват в рабочем поло-, жении при зажиме деталей малого диаметра. Захватное устройство для полых изделий ,с отверстием содержит два приспособления для строповки. Первое приспособление выполнено в виде кольца 1, связанного тягой 2 с шайбой 3, к которой к|1епятся одними концами гибкие сняли (миги) 4. Дру1-ими концами нити 4 крс ипч-я к шайбе5. iia нити 4 нанизан1 шлровы. liixn uiibie ч.мементы 6. К
шайбе
.) так/кг плппми кппцуми крепятся
свя:П1 (ниш) 7. Лругими конца.ми нити 7 крепятся к шайбе 8. нити 7 нанизаны шаровые захватные элементы 9. Шайба 8 жестко скреплена со вторым приспособлением для строповки, выполненным в виде полого стержня 10, с жестко скреп- ленным с ним крюком 11.
Шайбы 3 и 5 установлены с возможностью свободного перемещения вдоль полого стержня 10 и фиксирования от поворота П1тифтами 12, установленными в пазу 13 полого стержня 10.
Нити 4 и 7 выполнены из стали, капрона или искусственного волокна.
Захват работа1 г следующим образом.
В свободном по.-1 1женми захват удержи вается за колыю 1, п гибкие нити 4 и . вытягиваются вместе с нанизанными на них объемными телами Н и 9. В таком положении )т ннодится в отверстие детали 14 с внутренней iii).,io. floc. ie ослабления натяженпя тяги 2 iii,)iini,i 3 и 5 и объемные тела 6 и U смошлнпся. вниз и собираются в KOMiiaKDii iii оГи.ем произвольной формы со средним ди;г.ичр(1М больп1е, чем диаметр отверстия /ича.ш 1-1. Захват уде|14
со со ел
00
живается на крюке 11. Затем за крюк 11 происходит подъем детали и перенос ее на фебуемый для дальнейшей обработки или сборки участок.
I После этого происходит перенос тягового усилия на кольцо 1, шайбы 3 и 5 зани- 1ают крайнее верхнее положение. Происходит разжим. Захват извлекается из отверс- Гия детали.
Формула изобретения
J. Захватное устройство для полых изделий с отверстием, содержащее два приспособления для строповки, шаровые захватные элементы, соединенные между собой гибкой связью, один конец которой смонти- )ован на первом приспособлении для строповки, а другой связан с вторым приспо- облением, отличающееся тем, что, с целью
|засширения технологических возможностей
I
0
5
оно снабжено дополнительными гибкими связями с шаровыми захватными элементами и жестко связанным с первым приспособлением полым стержнем, на котором последовательно размеш.ены с возможностью продольного перемеш.ения по меньшей мере две шайбы, причем часть гибких связей одними концами закреплена на свободном конце стержня, а другими - на первой от свободного конца стержня шайбе, при этом другая часть гибких связей одними концами закреплена на первой шайбе, а другими - на последуюш.ей, причем второе приспособление для строповки посредством дополнительно введенной тяги, размещенной в полости стержня, соединено с последней от конца стержня шайбой.
2. Устройство по п. 1, отличающееся тем, что диаметр шаровых элементов, количество гибких связей и их длина увеличиваются от первой шайбы к последующим.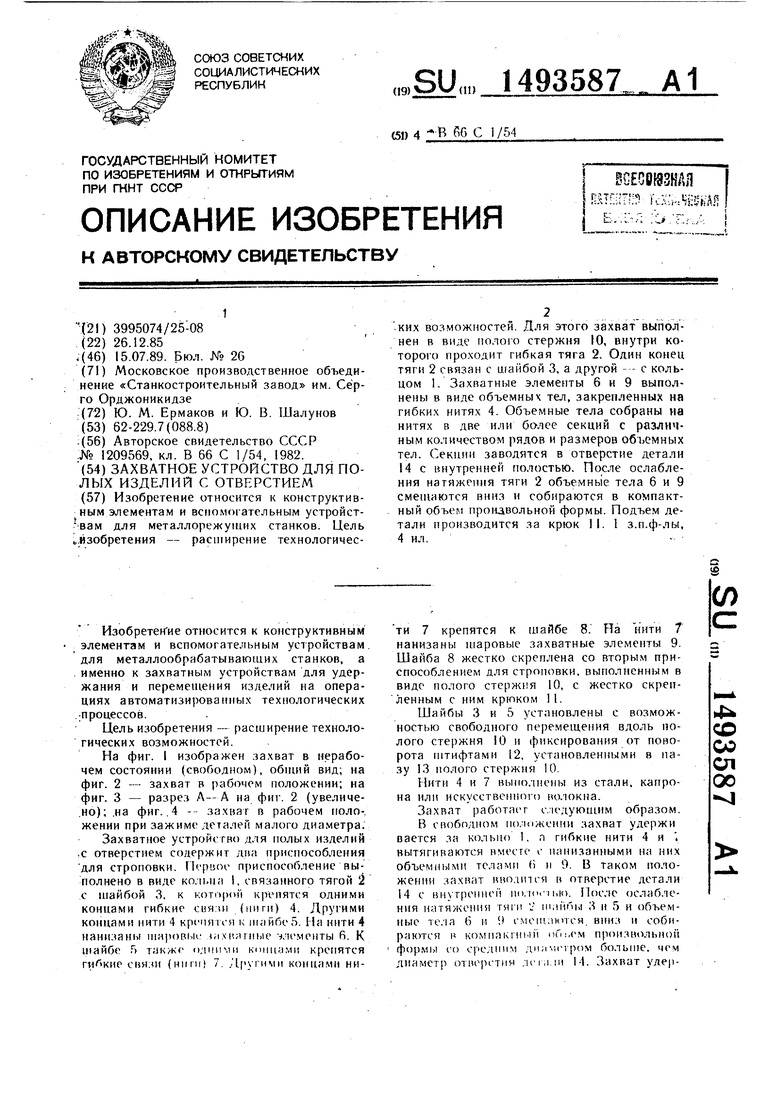
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват для подъема и монтажа колонн | 1980 |
|
SU935439A1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| Траверса | 1986 |
|
SU1399247A1 |
| Захватное устройство для изделий с центральными отверстиями | 1984 |
|
SU1162728A1 |
| Захват для грузов с проушинами | 1990 |
|
SU1730002A1 |
| Устройство для подачи объектов на сооружение | 1979 |
|
SU856969A1 |
| РАЗОВОЕ НЕСУЩЕЕ ПРИСПОСОБЛЕНИЕ | 1997 |
|
RU2107019C1 |
| Технологическая система | 1987 |
|
SU1690538A3 |
| Грузозахватное устройство | 1990 |
|
SU1773255A3 |
| Захватное устройство для груза с проушиной | 1989 |
|
SU1735194A1 |
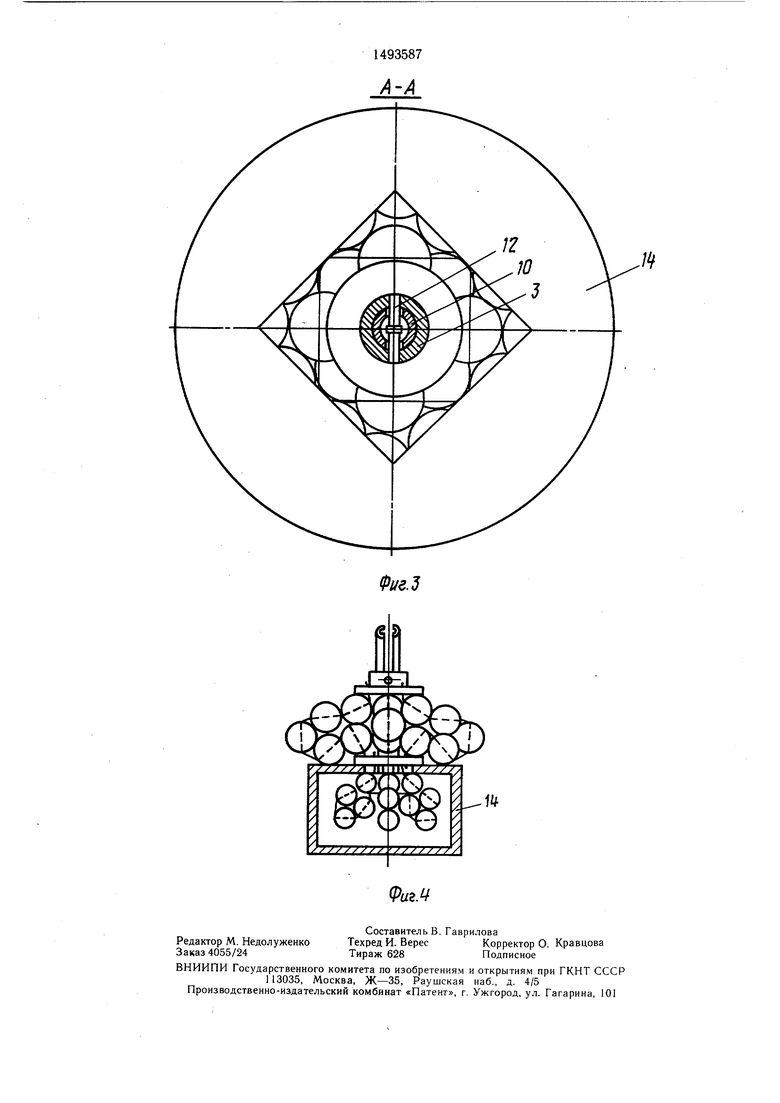
Изобретение относится к конструктивным элементам и вспомогательным устройствам для металлорежущих станков. Цель изобретения - расширение технологических возможностей. Для этого захват выполнен в виде полого стержня 10, внутри которого проходит гибкая тяга 2. Один конец тяги 2 связан с шайбой 3, а другой - с кольцом 1. Захватные элементы 6 и 9 выполнены в виде объемных тел, закрепленных на гибких нитях 4. Объемные тела собраны на нитях в две или более секций с различным количеством рядов и размеров объемных тел. Секции заводятся в отверстие детали 14 с внутренней полостью. После ослабления натяжения тяги 2 объемные тела 6 и 9 смещаются вниз и собираются в компактный объем произвольной формы. Подъем детали производится за крюк 11. 1 з.п.ф-лы, 4 ил.
Фиг.д
