Я7в Фиг.1
Изобретение относится к грузоподъемному оборудованию, в частности к захватным устройствам для проведения монтажных работ в местах, труднодоступных для работы традиционными захватными устройствами.
Известно захватное устройство для труб, которое содержит шарнирно закрепленные на траверсе рычаги с захватывающими элементами на концах, которые связаны через промежуточный элемент с приводом их поворота на шарнире в вертикальной плоскости для захода захватывающих элементов в отверстие трубы. Это устройство имеет большой радиус поворота рычагов с захватывающими элементами, обусловленный большим диаметром отверстия трубы по сравнению с захватывающими элементами отсутствием требования высокой точности попадания захватывающего элемента в отверстие, что исключает возможность его использования в труднодоступных местах.
Известно более компактное устройство, у которого геометрическая ось подвеса совмещена с геометрической осью приложения нагрузки, а захватный элемент выполнен в виде крюка, взаимодействующего с ответным элементом груза. Это устройство содержит навешиваемый на грузоподъемный механизм корпус, поворотный на оси, закрепленной на корпусе, захватный орган в виде крюка, кинематически связанный с ползуном, подвижным относительно корпуса через тягу, шарнирно закрепленную одним концом на конце захватного органа, а вторым концом на оси, размещенной на вертикальной геометрической оси подвеса, совпадающей с геометрической осью приложения нагрузки. При перемещении крюк совершает движение по радиусу и он не может точно попасть в такелажное отверстие груза, сечение которого мало отличается от сечения крюка.
Цель изобретения - улучшение эксплуатационных характеристик путем повышения точности попадания захватного органа в отверстие.
Указанная цель достигается тем, что в захватном устройстве для груза с проушиной, содержащем элемент строповки, связанный с ним корпус, закрепленный на корпусе посредством оси захватный орган и тягу, шарнирно связанную одним концом с захватным органом, второй конец которой связан с корпусом с возможностью вертикального переме щения, корпус включает в себя вертикальную пластину и жестко связанный с ней кронштейн, выполненный с вертикальным пазом на одной вертикальной оси симметрии с элементом строповки, а ось захватного органа расположена со смещением относительно упомянутого паза, при этом устройство снабжено размещенной в упомянутом пазу и закрепленной на втором конце тяги осью, а захватный орган выполнен со стержнем на свободном конце для заведения в проушину груза, размещенным с возможностью взаимодействия с пластиной, при этом концы пластины и захватного органа расположены в их замкнутом положении на одном уровне. Захватное устройство для грузов с проушиной снабжено жестко прикрепленной к середине вертикальной пластины упругой горизонтальной пластиной, расположенной в пазу, выполненным в захватном v органе и установленным на последнем с возможностью перемещения и фиксации1 пластины ползут
ном для частичного пере крытия упомянутого паза.
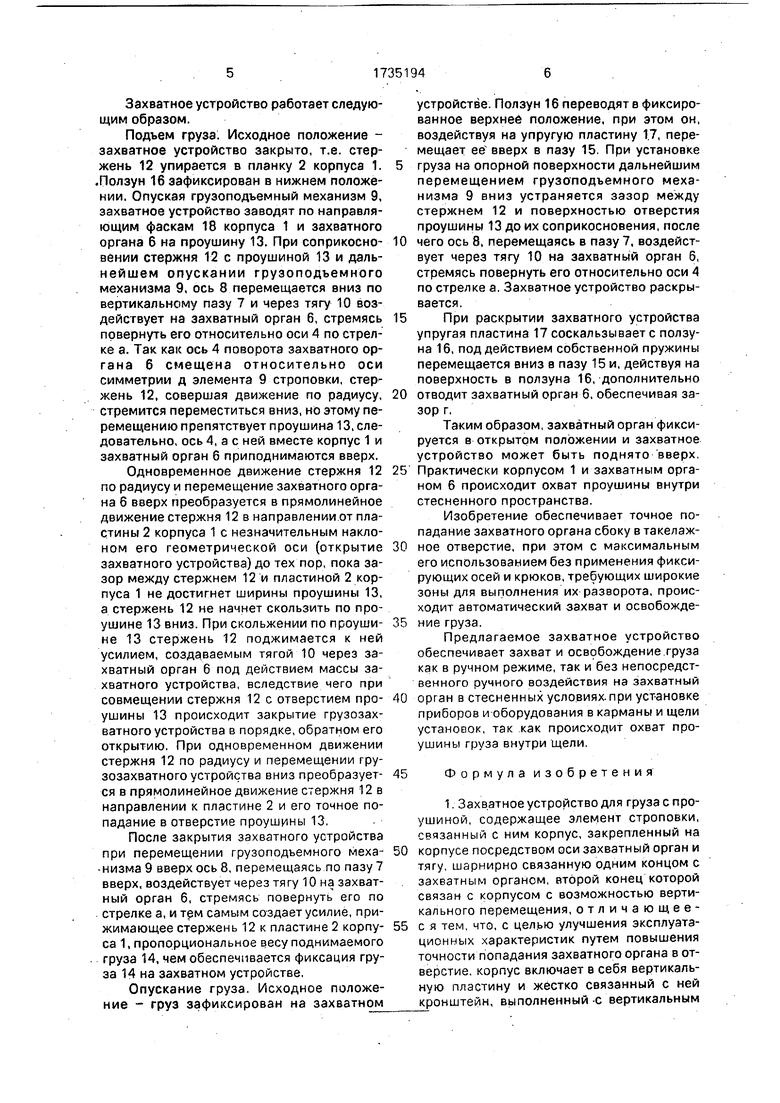
На фиг.1 изображено предлагаемое устройство, общий вид; на фиг.2 - схема соединения корпуса с элементом строповки и с
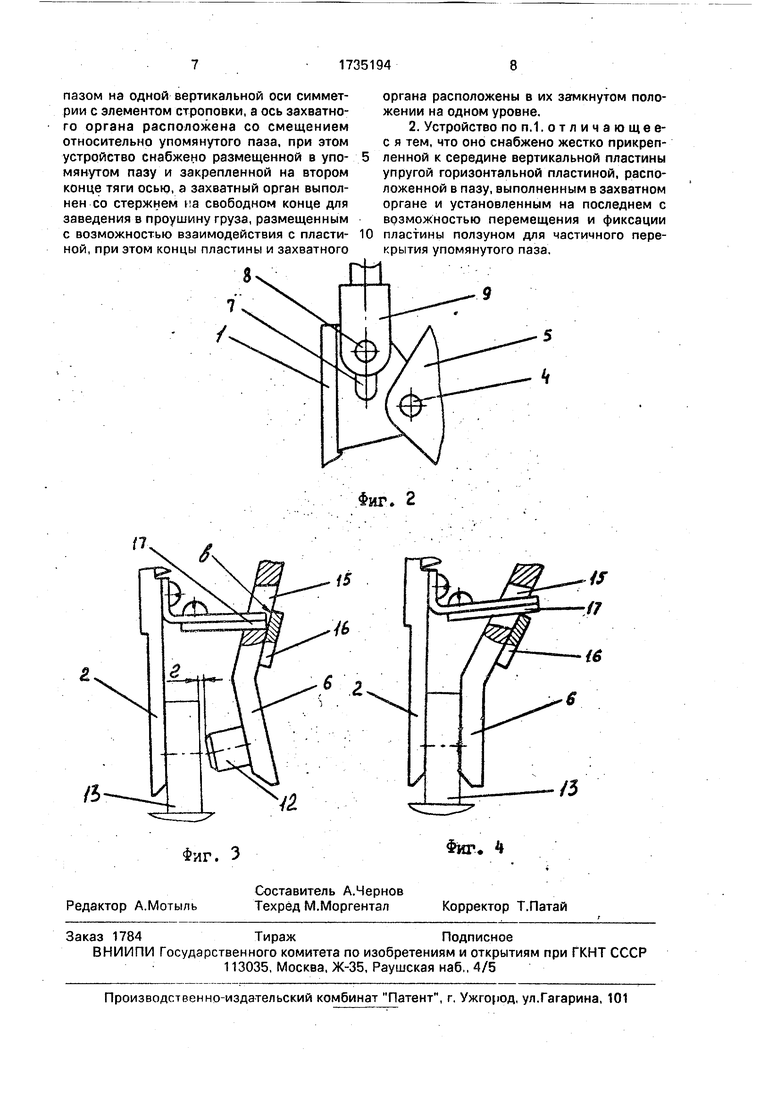
захватным органом; на фиг.З - схема фиксации захватного органа в отведенном положении; на фиг.4 - положение упругой пластины и ползуна при опускании груза. Устройство содержит корпус 1, включающий в себя вертикальную пластину 2 и жестко связанный с ней кронштейн 3, на конце которого выполнено отверстие для размещения в нем оси 4, соединенной с кронштейном 5 захватного органа 6. В кронштейне 3 корпуса 1 выполнен вертикальный паз 7, в котором установлена поперечная горизонтальная ось 8, соединяющая ось 8 и корпус 1 с элементом 9 строповки и тягой 10. Паз 7 выполнен на одной вертикальной
оси симметрии д элемента 9 строповки, а отверстие оси 4 расположено со смещением относительно упомянутого паза 7. Тяга 10 одним концом закреплена на оси 8, а вторым концом на поперечной горизонтальной
оси 11, закрепленной на кронштейне 5.
На свободном конце захватного органа 6 выполнен стержень 12 для заведения в отверстие проушины 13 груза 14. Захватный
орган 6 снабжен пазом 15. На одной его стороне закреплен подвижно ползун 16 для частичного перекрытия паза 15. Ползун 16 фиксируется в двух положениях- ниже паза 15.и частично перекрыв паз 15.
На пластине 2 корпуса 1 жестко прикреплена упругая горизонтальная пластина 17, размещенная вторым концом в пазу 15 захватного органа 6. На конце пластины 2 и захватного органа 6 выполнены направляющие фаски 18.
Захватное устройство работает следующим образом.
Подъем груза. Исходное положение - захватное устройство закрыто, т.е. стержень 12 упирается в планку 2 корпуса 1. .Ползун 16 зафиксирован в нижнем положении. Опуская грузоподъемный механизм 9, захватное устройство заводят по направляющим фаскам 18 корпуса 1 и захватного органа 6 на проушину 13. При соприкосновении стержня 12 с проушиной 13 и дальнейшем опускании грузоподъемного механизма 9, ось 8 перемещается вниз по вертикальному пазу 7 и через тягу 10 воздействует на захватный орган 6, стремясь повернуть его относительно оси 4 по стрелке а. Так как ось 4 поворота захватного органа 6 смещена относительно оси симметрии д элемента 9 строповки, стержень 12, совершая движение по радиусу, стремится переместиться вниз, но этому перемещению препятствует проушина 13,следовательно, ось 4, а с ней вместе корпус 1 и захватный орган б приподнимаются вверх.
Одновременное движение стержня 12 по радиусу и перемещение захватного органа б вверх преобразуется в прямолинейное движение стержня 12 в направлении от пластины 2 корпуса 1 с незначительным наклоном его геометрической оси (открытие захватного устройства) до тех пор, пока зазор между стержнем 12 и пластиной 2 корпуса 1 не достигнет ширины проушины 13, а стержень 12 не начнет скользить по проушине 13 вниз. При скольжении по проушине 13 стержень 12 поджимается к ней усилием, создаваемым тягой 10 через захватный орган 6 под действием массы захватного устройства, вследствие чего при совмещении стержня 12 с отверстием проушины 13 происходит закрытие грузозахватного устройства в порядке, обратном его открытию. При одновременном движении стержня 12 по радиусу и перемещении грузозахватного устройства вниз преобразуется в прямолинейное движение стержня 12 в направлении к пластине 2 и его точное попадание в отверстие проушины 13,
После закрытия захватного устройства при перемещении грузоподъемного меха- низма 9 вверх ось 8, перемещаясь по пазу 7 вверх, воздействует через тягу 10 на захватный орган 6, стремясь повернуть его по стрелке а, и тем самым создает усилие, прижимающее стержень 12 к пластине 2 корпуса 1, пропорциональное весу поднимаемого груза 14, чем обеспечивается фиксация груза 14 на захватном устройстве,
Опускание груза. Исходное положение - груз зафиксирован на захватном
устройстве. Ползун 16 переводят в фиксированное верхнее положение, при этом он, воздействуя на упругую пластину 17, перемещает ее вверх в пазу 15 При установке
груза на опорной поверхности дальнейшим перемещением грузоподъемного механизма 9 вниз устраняется зазор между стержнем 12 и поверхностью отверстия проушины 13 до их соприкосновения, после
чего ось 8, перемещаясь в пазу 7, воздействует через тягу 10 на захватный орган б, стремясь повернуть его относительно оси 4 по стрелке а. Захватное устройство раскрывается.
При раскрытии захватного устройства упругая пластина 17 соскальзывает с ползуна 16, под действием собственной пружины перемещается вниз в пазу 15 и, действуя на поверхность в ползуна 16, дополнительно
отводит захватный орган 6, обеспечивая зазор г,
Таким образом, захватный орган фиксируется в открытом положении и захватное устройство может быть поднято вверх
Практически корпусом 1 и захватным органом 6 происходит охват проушины внутри стесненного пространства.
Изобретение обеспечивает точное попадание захватного органа сбоку в такелажное отверстие, при этом с максимальным его использованием без применения фиксирующих осей и крюков, требующих широкие зоны для выполнения их разворота, происходит автоматический захват и освобождение груза.
Предлагаемое захватное устройство обеспечивает захват и освобождение груза как в ручном режиме, так и без непосредственного ручного воздействия на захватный
орган в стесненных условиях при установке приборов и оборудования в карманы и щели установок, так как происходит охват проушины груза внутри щели.
45
Формула изобретения
1 Захватное устройство для груза с про- ушиной, содержащее элемент строповки, связанный с ним корпус, закрепленный на
корпусе посредством оси захватный орган и тягу, шарнирно связанную одним концом с захватным органом, второй конец которой связан с корпусом с возможностью вертикального перемещения, отличающеес я тем что, с целью улучшения эксплуатационных характеристик путем повышения точности попадания захватного органа в отверстие, корпус включает в себя вертикальную пластину и жестко связанный с ней кронштейн, выполненный -с вертикальным
пазом на одной вертикальной оси симметрии с элементом строповки, а ось захватного органа расположена со смещением относительно упомянутого паза, при этом устройство снабжено размещенной в упомянутом пазу и закрепленной на втором конце тяги осью, а захватный орган выполнен со стержнем va свободном конце для заведения в проушину груза, размещенным с возможностью взаимодействия с пластиной, при этом концы пластины и захватного
органа расположены в их замкнутом положении на одном уровне.
2. Устройство по п.1. о т л и ч а ю щ е е- с я тем, что оно снабжено жестко прикрепленной к середине вертикальной пластины упругой горизонтальной пластиной, расположенной в пазу, выполненным в захватном органе и установленным на последнем с возможностью перемещения и фиксации пластины ползуном для частичного перекрытия упомянутого паза.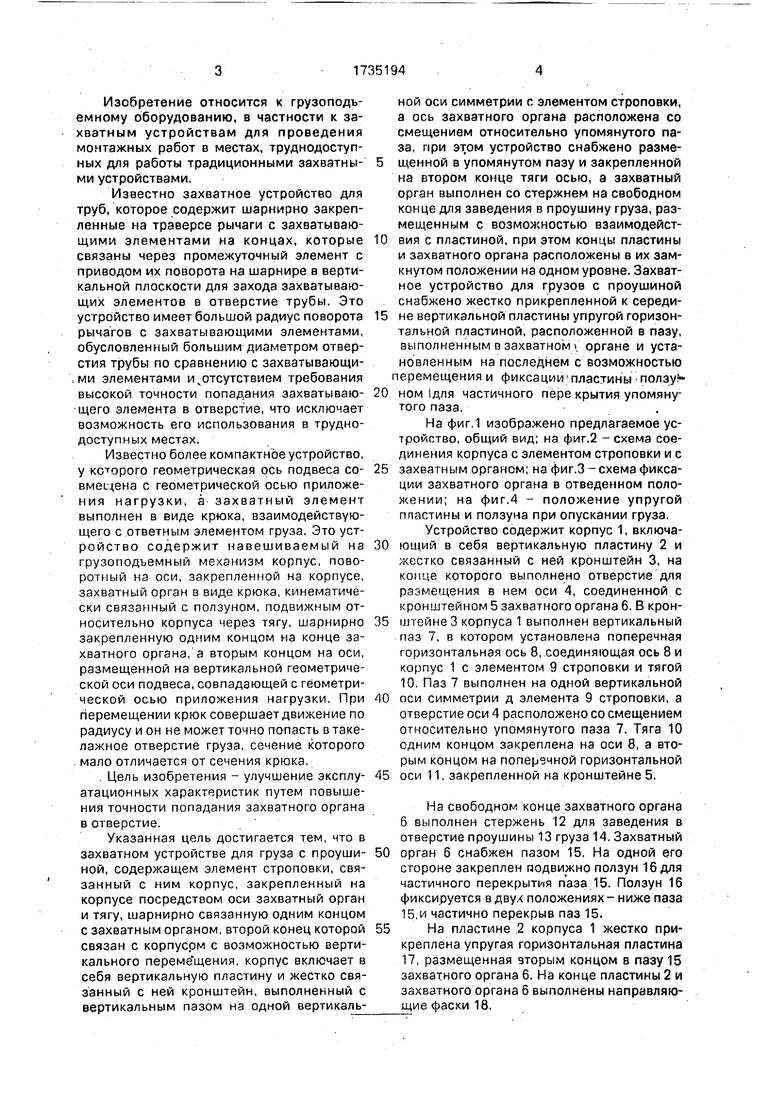
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для изделий с вертикальным отверстием | 1990 |
|
SU1782913A1 |
| Грузоподъемное устройство | 1974 |
|
SU622745A1 |
| Захват-раскладчик | 1980 |
|
SU948835A1 |
| Устройство для гашения колебаний грузовой подвески | 1989 |
|
SU1765097A1 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ | 1989 |
|
RU2006441C1 |
| УСТРОЙСТВО ДЛЯ СТРОПОВКИ ИЗДЕЛИЙ | 1990 |
|
RU2026255C1 |
| Устройство для захвата плоских деталей | 1988 |
|
SU1744039A1 |
| ТЯГА С ЗАПОРНЫМ УСТРОЙСТВОМ | 2003 |
|
RU2235671C1 |
Использование: изобретение относится к грузоподъемному оборудованию, а именно к захватным устройствам для проведения монтажных работ в местах, труднодоступных для работы традиционными захватными устройствами. Сущность изобретения: захватное устройство содержит корпус 1 в виде пластины 2, перекрывающей отверстие, на которой закреплен кронштейн 3 с вертикальным пазом, в котором установлена на оси 8 тяга 10, связанная с элементом 9 строповки и с захватным органом. При этом захватный орган 6 выполнен в виде двуплечего рычага со стержнем 12 на конце и закреплен со смещением относительно оси подвеса. 1 з.п ф-лы, 4 ил.
Фиг. 2
16
/5
| Грузозахватное устройство | 1983 |
|
SU1172861A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
