9 17 2 П.
I / / /
VI GJ О О О ГО
Изобретение относится к грузозахватным приспособлениям для транспортировки и установки груза, имеющего проушины, где необходима дистанционная расстро- повка на высоте, например при установке откатных дверей на грузовые вагоны.
Известно захватное устройство, содержащее корпус с горизонтальными сквозными отверстиями, соединенную с ним проушину для навешивания на крюк подъ- емной машины, размещенные в отверстиях корпуса с возможностью осевого перемещения и размещения концами в проушинах груза штыри, кинематически связанный со вторыми концами штырей зубчатый привод перемещения последних с приводной рукояткой.
Цель изобретения - улучшение условий эксплуатации путем обеспечения дистанционной расстроповки с обеспечением при этом фиксированного положения груза с захватом в пространстве.
Поставленная цель достигается тем, что захват для грузов с проушинами, содержащий корпус с горизонтальными сквозными отверстиями, соединенную с ним проушину для навешивания на крюк подъемной машины, размещенные в отверстиях корпуса с возможностью осевого перэмещения и размещения своими одними концами в про- ушинах груза штыри, кинематически связанный со вторыми концами штырей зубчатый привод перемещения последних с приводной рукояткой, последний включает в себя соединенные с корпусом посредст- вом горизонтальных осей находящиеся в зацеплении друг с другом шестерни, кинематическая связь вторых концов штырей с приводом их перемещения включает в себя жестко соединенные с шестернями соосно им цилиндрические барабаны и закрепленные одними своими концами на наружных поверхностях последних, а вторыми концами соединенные с вторыми концами штырей гибкие тяги, при этом приводная рукоятка жестко прикреплена одним своим концом к одному из барабанов и выполнена с элементом присоединения тяги дистанционной расстроповки на втором конце, при этом корпус в нижней части выполнен с упорами для взаимодействия с боковой поверхностью груза, а штыри подпружинены относительно корпуса. При этом каждый штырь выполнен с выступом на боковой поверхности, а корпус выполнен с гори- зонтальными пазами для размещения упомянутых выступов, а каждая тяга закреплена на барабане обоими концами посредством прижимной планки с образованием петли для соединения со штырем и
размещена на барабане с охватом его цилиндрической поверхности по длине, превышающей длину цилиндрической образующей упомянутой поверхности.
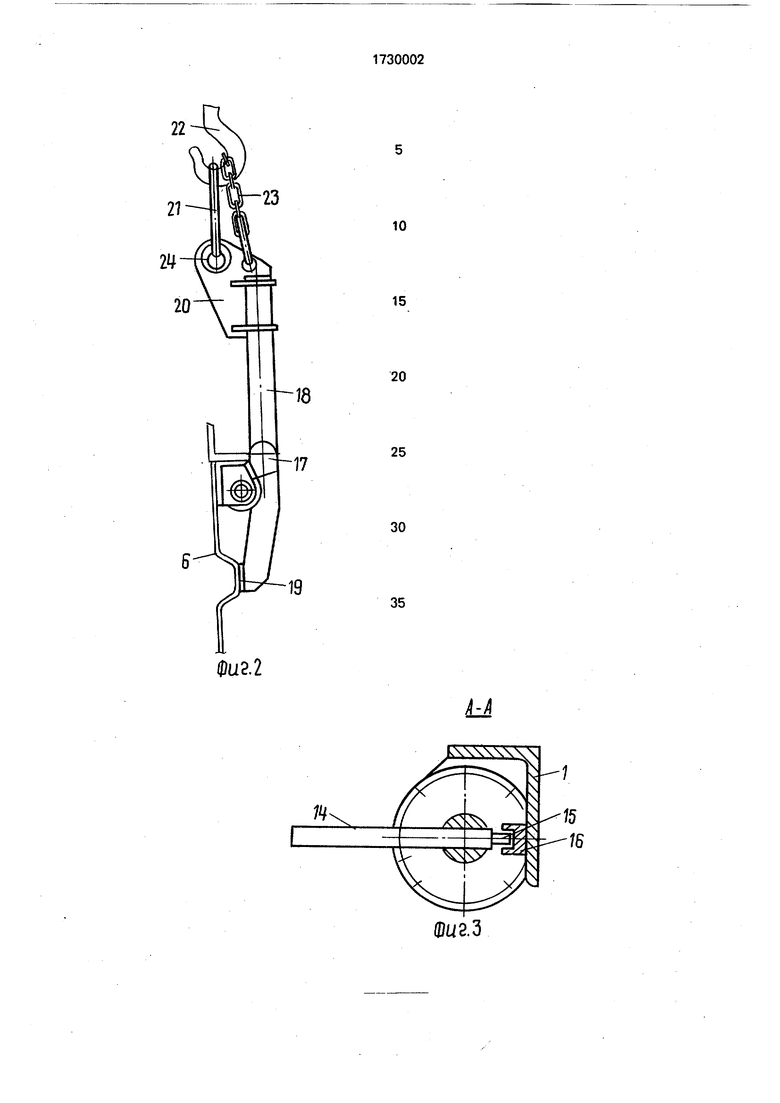
На фиг. 1 изображен общий вид захвата, вид спереди; на фиг. 2 - то же, вид сбоку; на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 - узел I на фиг. 1; на фиг. 5 - сечение Б-Б на фиг, 4; на фиг. 6 - схема строповки изделия.
Предлагаемый захват содержит корпус 1 с горизонтальными сквозными отверстиями 2, в которых установлены с возможностью осевого перемещения подпружиненные штыри 3, входящие одними концами 4 в проушины 5 груза 6, а вторые концы кинематически связаны с зубчатым приводом перемещения их. Зубчатый привод перемещения содержит соединенные с корпусом 1 посредством горизонтальных осей находящиеся в зацеплении друг с другом шестерни 7. Кинематическая связь вторых концов штырей 3 с приводом их перемещения включает в себя гибкие тяги 8 и жестко соединенные с шестернями 7 соосно им цилиндрические барабаны 9. Гибкая тяга 8 продевается в отверстие 10 штыря 3 и оба конца ее закрепляются на барабане 9 прижимной планкой 11. Причем для создания необходимого трения оба конца гибкой тяги 8 огибают барабан 9 более одного раза так, что происходит охват его цилиндрической поверхности по длине, превышающей длину цилиндрической образующей упомянутой поверхности. К одному из барабанов 9 жестко прикреплена одним своим концом приводная рукоятка 12, а на втором конце она выполнена с элементом присоединения тяги 13 дистанционной расстроповки. Кроме этого, для управления захватом на штырях 3 установлены ручки 14. Выступы 15 на боковой поверхности штырей 3, перемещаясь в горизонтальных пазах 16, удерживают штыри 3 от поворота вокруг продольной оси. В середине корпуса 1 на стойках 17 шарнирно закреплена подвеска 18, имеющая на нижнем конце упор 19, а на верхнем ушко 20, содержащее установленную над центром тяжести груза 6 проушину 21 для навешивания на крюк 22 грузоподъемной машины и страховочную петлю 23 из кругло- звенной цепи.
Вертикальное положение груза 6 на захвате регулируют смещением шайб 24 вправо - влево. Шайбы приваривают к ушку 20 после удовлетворительного пробного подъема груза 6.
Захват работает следующим образом.
На крюк 22 грузоподъемной машины прежде надевают страховочную петлю 23, затем проушину 21. Захват подводят к проушинамб груза 6, например, откатной двери грузового вагона, одной или обеими ручками 14 сжимают пружины соответствен но одного или обоих штырей 3 и, устанавливая захват между проушинами груза 6 и отпуская ручки 14, вставляют концы 4 штырей 3 в проушины 5. При транспортировке упор 19 удерживает груз б от раскачивания и обеспечивает его вертикальное положение. После установки груза 6 на высоте, например, установки откатной двери на грузовой вагон, производят при ослабленном тросе грузового крюка 22 дистанционную рас- строповку, поворачивая с помощью тяги 13 дистанционной расстроповки и приводной рукоятки 12 оба барабана 9 так, чтобы гибкие тяги 8 вытянули штыри 3 из проушин 5. Внедрение предлагаемого захвата обеспечивает улучшение условий эксплуатации путем обеспечения дистанционной расстроповки, обеспечивая при этом фиксированное положение захвата в пространстве.
Формула изобретения 1. Захват для грузов с проушинами, содержащий корпус с горизонтальными сквоз- ными отверстиями, соединенную с ним проушину для навешивания на крюк подъемной машины, размещенные в отверстиях корпуса с возможностью осевого перемещения и размещения своими концами в про- ушинах груза штыри, кинематически связанный с вторыми концами штырей зубчатый привод перемещения последних с приводной рукояткой, отличающий с я тем, что, с целью улучшения условий в эксплуатации путем обеспечения дистанционной расстроповки с обеспечением при этом фиксированного положения груза в пространстве, зубчатый привод перемещения
штырей включает в себя соединенные с корпусом посредством горизонтальных осей находящиеся в зацеплении друг с другом шестерни, кинематическая связь вторых концов штырей с приводом их перемещения
включает в себя жестко соединенные с шестернями соосно им цилиндрические барабаны и закрепленные одними своими концами на наружных поверхностях последних, а вторыми концами соединенные с вторыми концами штырей гибкие тяги, при этом приводная рукоятка жестко прикреплена одним своим концом к одному из барабанов и выполнена с элементом присоединения тяги дистанционной расстроповки на втором конце, при этом корпус в нижней части выполнен с упором для взаимодействия с боковой поверхностью груза, а штыри подпружинены относительно корпуса.
2,Захват по п. 1,отличающийся тем, что каждый штырь выполнен с выступом на боковой поверхности, а корпус выполнен с горизонтальным пазом для размещения упомянутых выступов.
3.Захват по п. 1, о т ли чающийся тем, что каждая тяга закреплена на барабане обоими концами посредством прижимной планки с образованием петли для соединения со штырем и размещена на барабане с охватом его. цилиндрической
поверхности по длине, превышающей развернутую длину окружности цилиндрической образующей упомянутой поверхности.
Фиг 2

| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для грузов с проушинами | 1990 |
|
SU1787925A1 |
| ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО | 2003 |
|
RU2265571C2 |
| АГРЕГАТ ДЛЯ УКЛАДКИ ОПТОВОЛОКОННОГО КАБЕЛЯ НА ПРОВОД ВОЗДУШНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧ | 1996 |
|
RU2124256C1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2002 |
|
RU2240971C2 |
| Захват-кантователь | 1982 |
|
SU1031867A1 |
| СПОСОБ РАБОТЫ ГРУЗОВОЙ ТЯГОВОЙ ЛЕБЕДКИ И ГРУЗОВАЯ ТЯГОВАЯ ЛЕБЕДКА | 2016 |
|
RU2630266C1 |
| Захватное устройство для штучных грузов | 1989 |
|
SU1765096A1 |
| Захват-кантователь | 1981 |
|
SU1013388A1 |
| Грузозахватное устройство | 1979 |
|
SU850549A1 |
| Грузозахватное устройство | 1988 |
|
SU1594113A1 |


Изобретение относится к подъемному оборудованию, в частности к грузозахватным устройствам. Цель изобретения - улучшение условий в эксплуатации путем т обеспечения дистанционной расстроповки с обеспечением при этом фиксированного положения груза в пространстве. Захват содержит корпус 1 с отверстиями 2, штыри 3, шестерни 7, гибкие тяги 8, барабаны 9. Навешенный на крюк подъемной машины захват подводят к проушинам 5 груза 6. Ручкой 14 сводят штыри 3 к центру. Размещают штыри 3 в проушинах 5 груза 6. Транспортируют груз 6. По окончании поворачивают рукоятку 12 при помощи тяги 13. Тяги 8 при этом наматываются на барабаны 9 и выводят штыри 3 из проушин 5; Далее цикл повторяется. 2 з.п. ф-лы, 6 ил.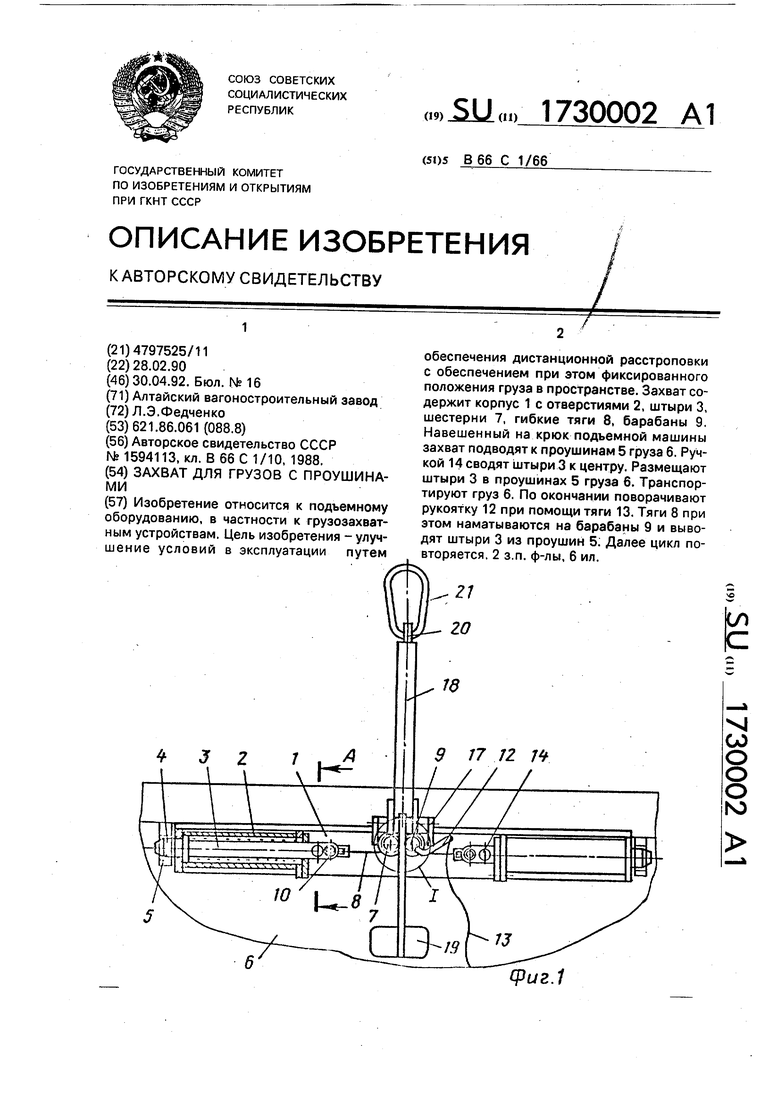
даиг.З
Б-5
Фп.6.
| Грузозахватное устройство | 1988 |
|
SU1594113A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
