Изобретение относится к маш1шо- строению и может быть использовано в устройствах, где необхо; 1им пружинный механизм с большим ходом пружины.
Цель изобретения - повышение надежности.
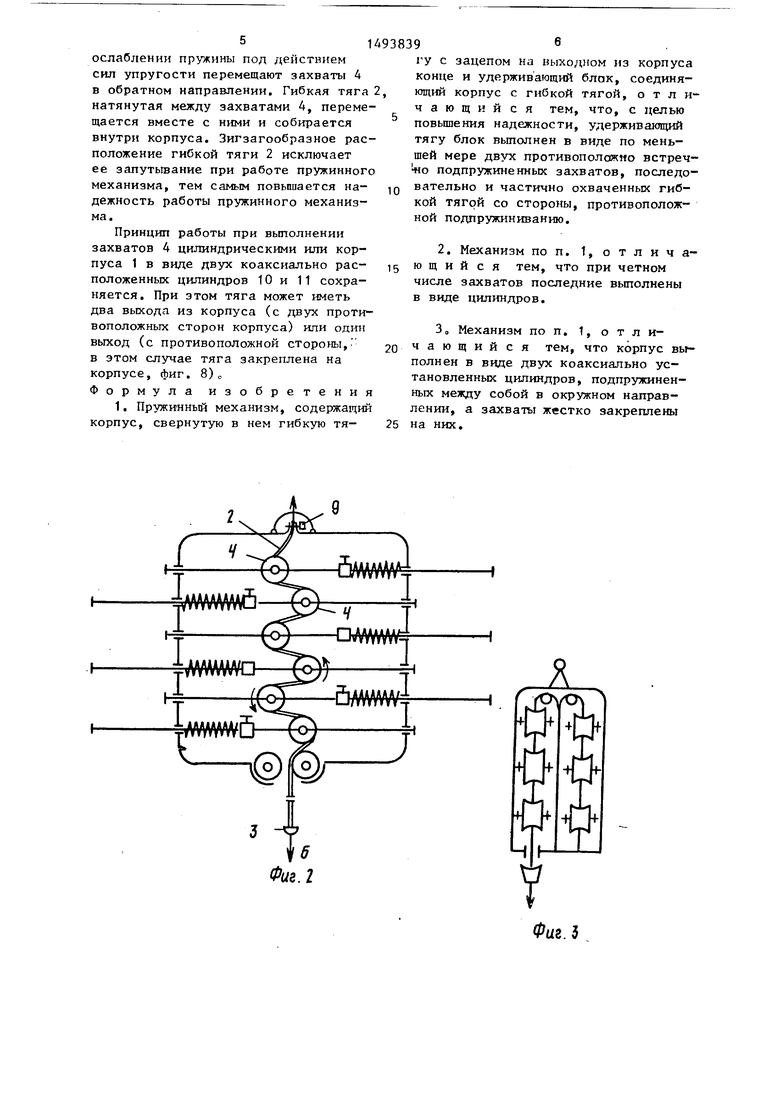
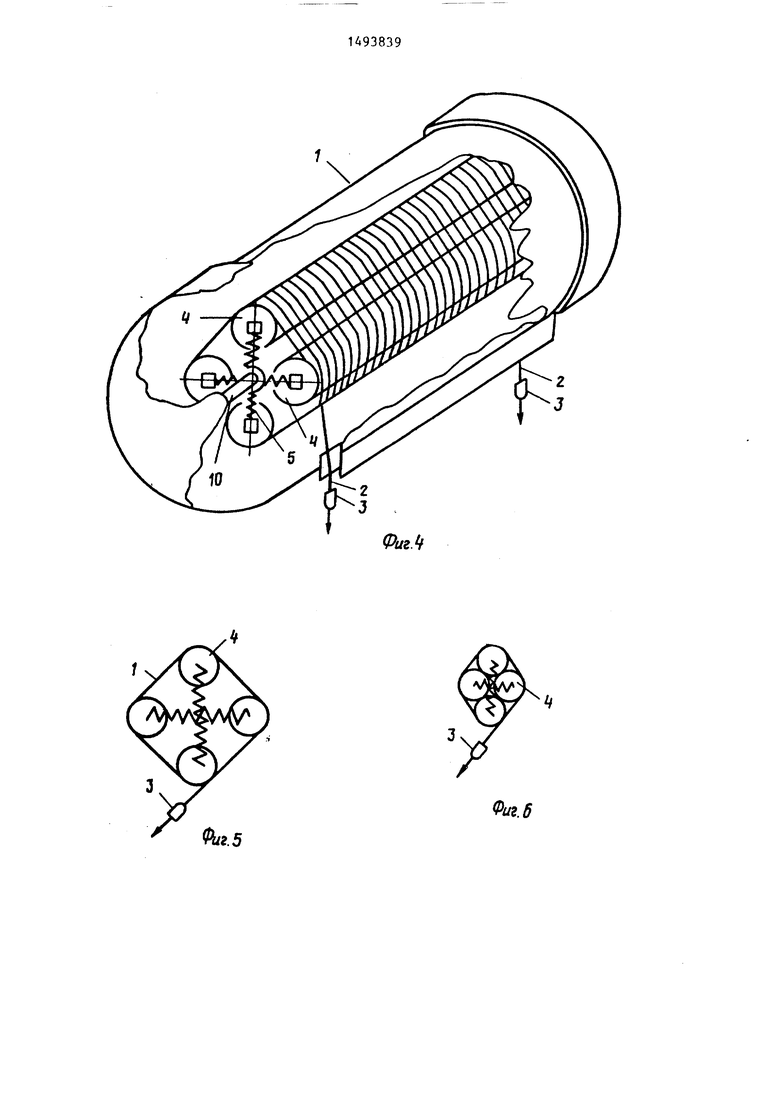
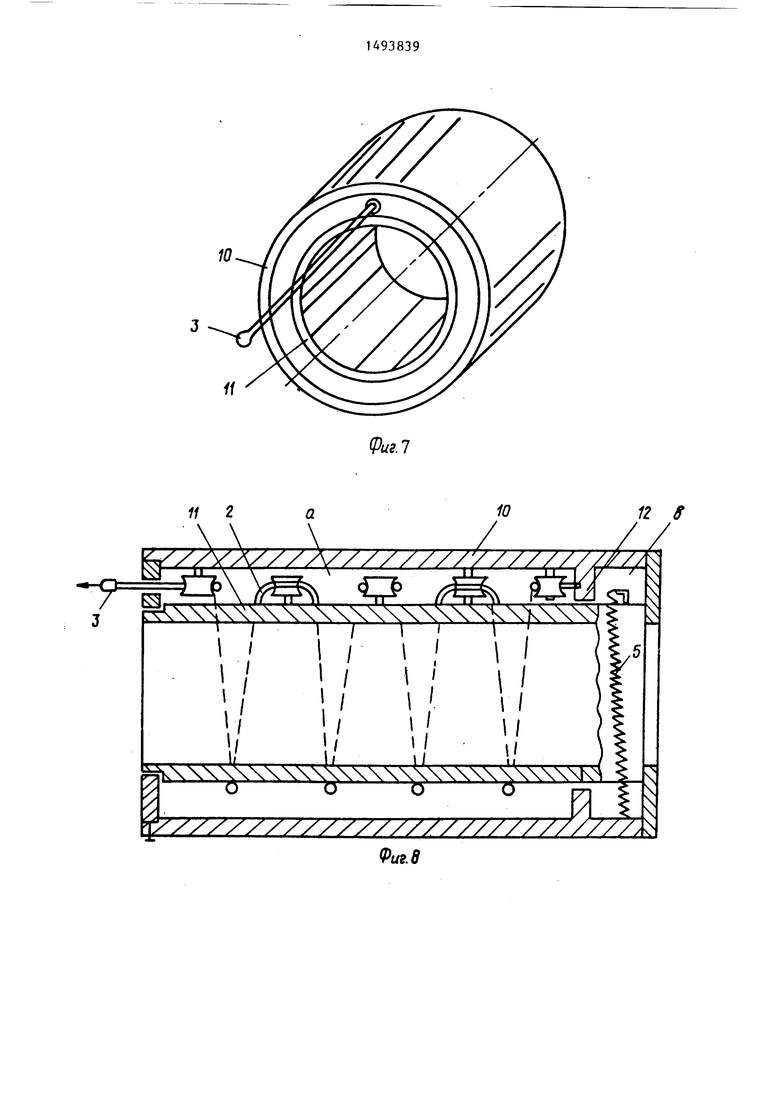
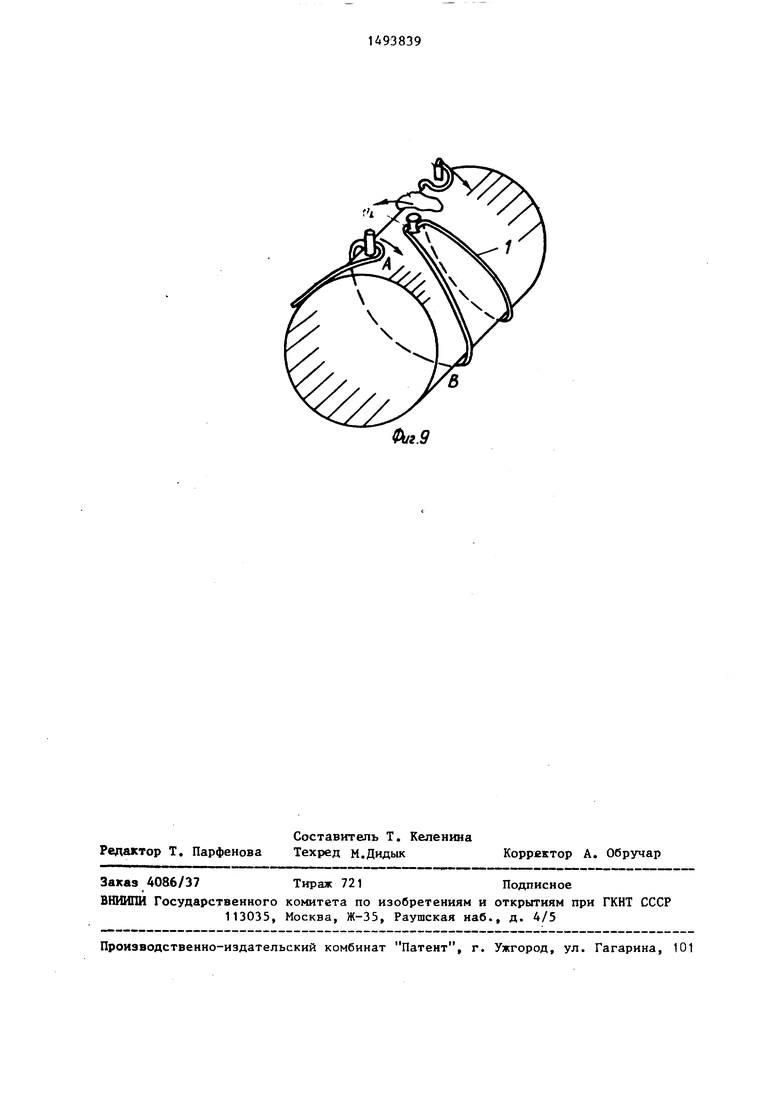
На фиг, 1 изображен предлагаемый пружинный механизм, в котором корпус имеет форму параллелепипеда, а захваты вьшолнены в виде роликов, в исходном состоянии; на фиг. 2 - то же, в действии; на фиг. 3 - то же, двухъярусное исполнение, на фиг.4 - то же, с цилиндрическими захватами, изометрия; на фиг. 5 - пружинный механизм, изображенный на фиг. 4, в исходном состоянии; на фиг. 6 - то же, в действии; на фиг.7 - пружинный механизм с корпусом, выполненным в виде двух коаксиально установленных цилиндров, подпружиненных между собой в окружном направлении, изометрия; на фиг.8 - пружинный механизм, изображенный на фиг.7 сечение плоскостью, в которой лежит ось цилиндров; на фиг. 9 - схема размещения гибкой тяги на внутреннем цилиндре.
Пружинный механизм содержит корпус 1, свернутую в нем гибкую тягу 2 с зацепом 3. На выходном из корпуса 1 конце расположен удерживающий блок, соединяющий корпус 1 с гибкой тягой 2, выполненный в виде по меньшей мере двух захватов 4. Захваты 4 подпружинены пружинами 5 и охвачены гибкой тягой со стороны, противоположной подпружиниванию. Число захватов 4 может быть любым больше двух и определяется в зависимости от требуемой длины, при этом необходимо зигзагообразное расположение тяги в захватах. Форма вьтолнения корпуса 1 и захватов 4 разнообразна и зависит от конкретного применения пружинного механизма. Корпус 1 может быть плоским в форме параллелепипеда или цилиндрическим, а захвты 4 могут быть вьтолнены в виде
роликов или ЦИЛИНД150В.
Крепление пружин зависит от выбранной формы корпуса и захватов.
В случае плоского вьшолнения пружинного механизма (фиг. 1 и 2) внутри корпуса размещены захваты 4, выполненные в виде роликов, установленных с возможностью перемещения
5
0
5
0
5
0
45
50
55
по направлякжчим 6, которые между собой параллельны. Направляю11)тми могут быть оси или пазы. На направляющих соосно роликам установлены пружршы 5. Расстояние между ползунком 7 пружины 5 и захватом 4 остается до и во время работы неизменным. На выходе из корпуса с обеих сторон установлены роликовые направляющие 8 гибкой тяги 2, поджатие которьк и гибкой тяги осуществляется винтом 9. Если нет необходимости двухстороннего выхода тяги из корпуса, то один конец может крепиться к корпусу 1 (фиг. 2).
Для увеличения полезной длины тяги 2 возможен дв гхъярусньй вариант исполнения пружинного механизма, при этом оба яруса вмполиены, как показано на фнг. 1.
В пружинном механизме (фиг. 4) с цилиндрическими захватами 4 оси пружин пересекаются под прямым утлом, а ползунки 7 жестко закреплены на цилиндрических захватах 4. Пружины крепятся к оси 10, которая проходит через точку пересечения пружин.
Третьим вариантом выполнения пружинного механизма является случай, когда корпус 1 выполнен в виде двух коаксиально установленных цштандров
10и 11 (наружный и внутренний соответственно). Оба цилиндра 10 и 11 подпруткинены между собой в окружном направлении пружинами 5, действия которых противонаправлены. Захваты
4 жестко закреплены на цилиндрах, а тяга 2 зигзагообразно расположена на захватах 4 (фиг. 9). Для обеспечения зазора между цилиндрами 10 и
11имеется кольцевой внутренний выступ 12, который разделяет полость между цилиндрами на две полости и и fe . В полости b размещены пружины 5, обеспечивающие взаимно подпружиненный поворот цилиндров 10 и 11.
Пружинный механизм работает еле- дукнцим образом.
Под действием растягивающих сил, приложенных к зацепам 3, гибкая тяга 2, последовательно и частично ох- ватьгоающая захваты 4, воздействует на них и последние перемещаются по направляющим навстречу друг другу. При этом пружины 5 сжимаются. При прекращении действия силы или ее
ослаблении пружины под действием сил упругости перемещают захваты 4 в обратном направлении. Гибкая тяга натянутая между захватами 4, перемещается вместе с ними и собирается внутри корпуса. Зигзагообразное расположение гибкой тяги 2 исключает ее запутьшание при работе пружинного механизма, тем самым повышается надежность работы пружинного механизма.
Принцип работы при вьтолнении захватов 4 цилиндрическими или корпуса 1 в виде двух коаксиально расположенных цилиндров 10 и 11 сохраняется. При этом тяга может иметь два выхода из корпуса (с двух противоположных сторон корпуса) или один выход (с противоположной стороны, в этом случае тяга закреплена на корпусе, фиг. 8)о Формула изобретения
1. Пружииный механизм, содержащий корпус, свернутую в нем гибкую тя
38396
ГУ с зацепом на выходном из корпуса конце и удерживающий блок, соединяющий корпус с гибкой тягой, отличающийся тем, что, с целью повышения надежности, удерживающий тягу блок вьтолнен в виде по меньшей мере двух противоположно встреч- мо подпружиненных захватов, последовательно и частично охваченных гибкой тягой со стороны, противоположной подпружиниванию.
0
2. Механизм по п. 1, о т л и ч а- ю щ и и с я тем, что при четном числе захватов последние выполнены в виде цилиндров.
3 о Механизм поп. 1, отли- чающийся тем, что корпус выполнен в виде двух коаксиально установленных цилиндров, подпружиненных между собой в окружном направлении, а захваты жестко закреплены на них.
| название | год | авторы | номер документа |
|---|---|---|---|
| Демпфер для подающей каретки штампа | 2020 |
|
RU2756457C1 |
| Стояночный тормоз транспортного средства | 1990 |
|
SU1792851A1 |
| СТРЕЛКОВОЕ ОРУЖИЕ С НЕПРЕРЫВНЫМ РЕЖИМОМ СТРЕЛЬБЫ (ВАРИАНТЫ), ФУНКЦИОНАЛЬНЫЕ УЗЛЫ СТРЕЛКОВОГО ОРУЖИЯ И СПОСОБ ОДНОВРЕМЕННОГО СНИЖЕНИЯ ОТДАЧИ И УРОВНЯ ЗВУКА СТРЕЛКОВОГО ОРУЖИЯ | 2003 |
|
RU2254539C1 |
| Станция погрузки-разгрузки перемещаемого по пневмотрубопроводу контейнера с торцовыми крышками | 1987 |
|
SU1497133A1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОГО ОТДЕЛЕНИЯ ОТ СТОПЫ И ВЫДАЧИ ГАЗЕТ И ТОМУ ПОДОБНЫХ ЛИСТОВЫХ ИЗДЕЛИЙ | 2002 |
|
RU2219585C1 |
| ЗАМКОВОЕ УСТРОЙСТВО АППАРЕЛИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2186001C1 |
| ТРАЛОВОЕ УСТРОЙСТВО ДЛЯ ИЗВЛЕЧЕНИЯ ИНОРОДНЫХ ТЕЛ ИЗ ТРУБЧАТЫХ ОРГАНОВ | 2010 |
|
RU2492824C2 |
| РЕАКТИВНЫЙ ГРАНАТОМЕТ И РАКЕТА ДЛЯ НЕГО /ВАРИАНТЫ/ | 2012 |
|
RU2499973C1 |
| СКВАЖИННОЕ МОДУЛЯЦИОННОЕ УСТРОЙСТВО | 2009 |
|
RU2515624C2 |
| Загрузочное устройство | 1989 |
|
SU1646781A1 |
Изобретение относится к машиностроению. Цель изобретения - повышение надежности. Пружинный механизм содержит корпус 1, свернутую в нем гибкую тягу 2 с зацепами 3, удерживающий блок, соединяющий корпус 1 с гибкой тягой 2, выполненный в виде по меньшей мере двух захватов 4, подпружиненных пружинами 5. Гибкая тяга 2 последовательно и частично охватывает захваты 4. Захваты 4 и пружины 5 перемещаются при работе пружинного механизма по направляющим 6, расстояние между ними остается неизменным. Длина тяги, а следовательно, ход пружины зависят от количества захватов, от формы выполнения корпуса. При работе механизма под действием гибкой тяги 2 захваты 4 сближаются, а пружины 5 сжимаются. При уменьшении растягивающих гибкую тягу 2 сил под действием сил упругости пружины растягиваются, а гибкая тяга собирается внутри корпуса 1. 2 з.п.ф-лы, 9 ил.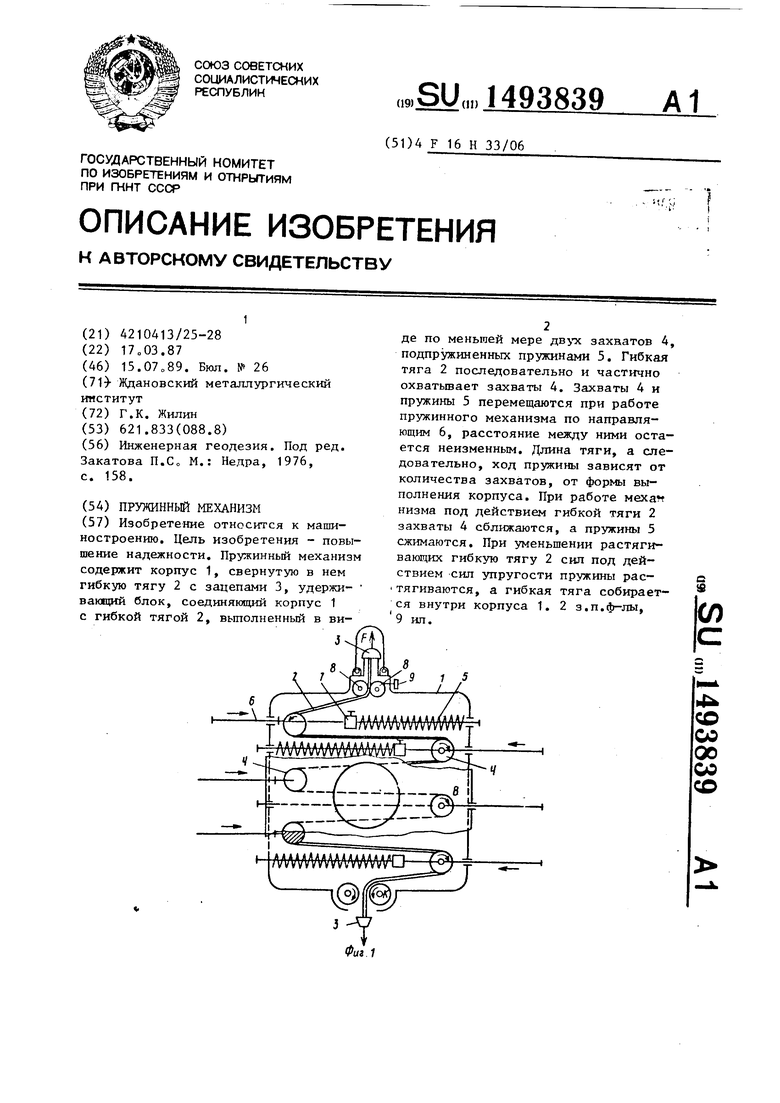
йАш4
V CMWW
UAWWfer
6 Фиг. 2
,
r
А
r
Фиг.
Фиг.Ц
иг.6
ю
фиг. 7
Фиг. 8
г.9
| Инженерная геодезия | |||
| Под ред | |||
| Закатова П.Со М.: Недра, 1976, с | |||
| Система механической тяги | 1919 |
|
SU158A1 |
