4
х а ОС
J а
20
25
т1493878
Итобрстение относится к носончме- рител1-иой технике.
Цель итобретения - повытснис быст- родрйстпия и точности весов.f.
На чертеже предстлпленп блок-схема весов.
Весы с электромлгнитньгм уравновешиванием содержат гручоприемную платформу 1 , датчик 2 иеремешений грузо- ю приемной платформы 1, первый интегратор 3, корректирующий блок 4, ключ 5, стабилизатор 6 эталонного тока, счетную схему 7, блок 8 индикации, ин- тегрируюиц1Й сум 5атор 9, электромаг- 15 |Нитную уравновешивающую систему 0, источник 11 опорного напряжения, ком- наратор 2, триггер 13, второй интегратор 14, генератор 15 тактовых им- пульсоп.
Источник 11 опориог о напряжения, компаратор 12, три1 гер 13, второй интегратор 14 и генератор 15 образуют интегральный широтно-импульст ый модулятор 1 6 ,
Весы работают следующим образом.
Сигнал с датчика 2 поступает на Вход корректирующего блока 4 и через интегратор 3 на вход модулятора 16. В момент совнаде 1ия интеграла входного сигнала модулятора 16 с постоянным порогом срабатывания U , задаваемым источником 11 опорного напряжения, происходит срабатывание компаратора 12 и триггер 13 устанавливается в единицу, выдавая сигнал замыкания на ключ 5. Тем самг.1М формируется передний фронт импульса модулятора 16. Задний фронт формируется при поступлении очередного импульса с генератора 15 тактовых импульсов, одновременно обнуляющего второй интегратор 14. При замыкании ключа 5 выход стабилизатора 6 эталонного тока подключается к входу счет- 45 ной схемы 7, посредством которой осуществляется получение результата взвешивания в цифровом виде и выдача его на блок 8 индикации, а через интегрирующий сумматор 9 - на вход эдактронагнитной уравновешивающей
системы 10,которая создает компенаи- руюшую силу. Местная обратная связь с выхода пЬ току электромагнитной уравновешивающей системы 10 на вход интегрирующего сумматора 9 служит для сглаживания пульсацией в контуре управления и повышения точности взвешивания и быстродействия. Корректирующий блок 4 и последовательно включенные первый интегратор 3 и модулятор 16 образуют адаптивный к массе взвешиваемого груза пропорционально-интегрально-дифференциальныйрегулятор.
30
Редактор М.Бандура
Формула изобретения Весы с электромагнитным уравновешиванием, содержащие датчик перемещения грузоприемной платформы, соеди- ненны11 с входами первого интегратора и корректирующего блока, выход которого соединен с первым входом интегрирующего сумматора, второй вход которого соединен с выходом обратной связи по току электромагнитной уравновешивающей системы, вход которой соединен с выходом интегрирующего су 1матора, второй интегратор, выход которого соединен с первым входом компаратора, триггер, выход которого соединен с управляющим входом ключа, через который стабилизатор эталонного типа подключен к третьему входу интегрирующего сумматора и входу счетной схемы, выход которой соединен с входом блока индикации, источник опорного напряжения и генератор тактовых импульсов, выход которого соединен с первым входом второго интегратора, отлич ающие- с я тем, что, с целью повьщ ения быстродействия и точности, выход первого интегратора соединен с вторым входом второго интегратора, выход источника опорного напряжения соединен с вторым входом компаратора, выход которого соединен с выходом установки в 1 триггера, а вход установки в О которого соединен с выходом генератора тактовых импульсов.
Составитель В.Ширшов
Техред МЛидык Корректор А.Козориз
35
40
50
системы 10,которая создает компенаи- руюшую силу. Местная обратная связь с выхода пЬ току электромагнитной уравновешивающей системы 10 на вход интегрирующего сумматора 9 служит для сглаживания пульсацией в контуре управления и повышения точности взвешивания и быстродействия. Корректирующий блок 4 и последовательно включенные первый интегратор 3 и модулятор 16 образуют адаптивный к массе взвешиваемого груза пропорционально-интегрально-дифференциальныйрегулятор.
20
ю 15
25
45
30
45
35
45
40
45
50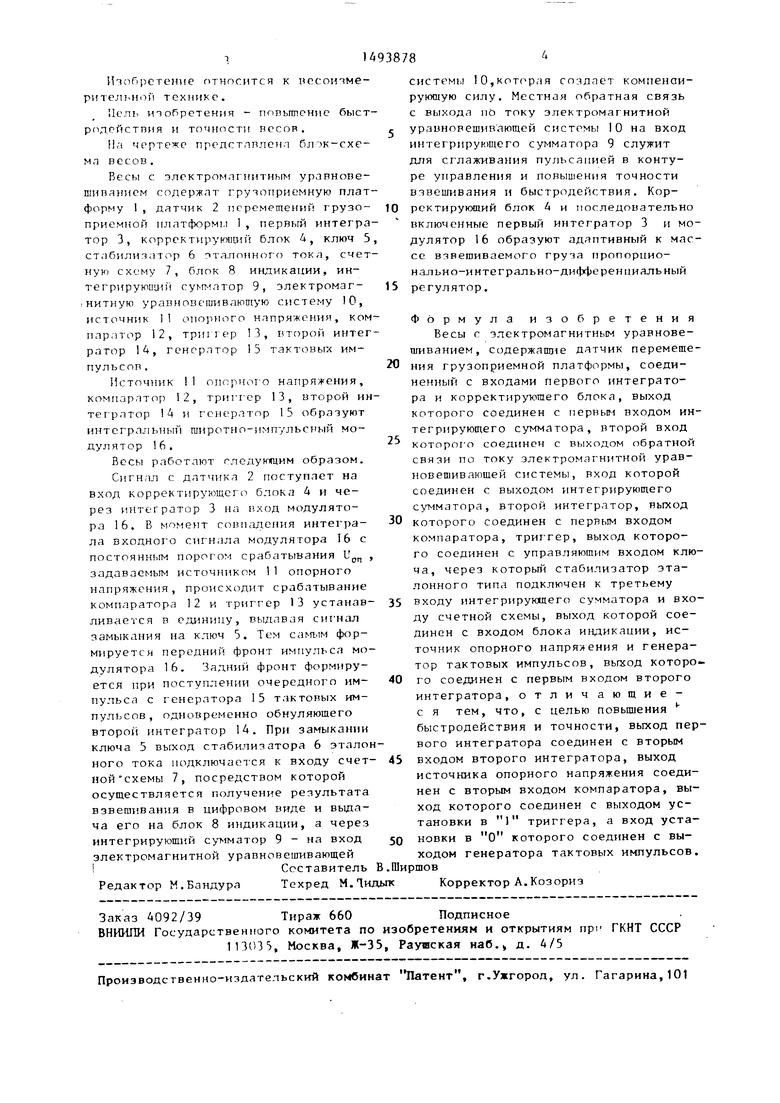
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая система автоматической регистрации веса | 1986 |
|
SU1434269A2 |
| Устройство для взвешиваниядВижущиХСя Об'ЕКТОВ | 1978 |
|
SU794393A1 |
| Устройство для взвешивания движущихся объектов | 1981 |
|
SU993039A1 |
| Устройство для измерения электрических величин | 1987 |
|
SU1525592A1 |
| Преобразователь ток-частота с импульсной обратной связью | 1987 |
|
SU1559407A2 |
| Преобразователь ток-частота с импульсной обратной связью | 1986 |
|
SU1451863A1 |
| Преобразователь ток-частота с импульсной обратной связью | 1987 |
|
SU1510087A1 |
| Преобразователь ток-частота с импульсной обратной связью | 1987 |
|
SU1552377A1 |
| Интегрирующий аналого-цифровой преобразователь | 2023 |
|
RU2802872C1 |
| Адаптивный регулятор | 1983 |
|
SU1228194A1 |
Изобретение относится к весоизмерительной технике. Датчик положения 2 грузоприемной платформы 1 вырабатывает сигнал, который поступает параллельно на вход корректирующего блока 4, а через интегратор 3 - на вход модулятора 16, который включает в себя источник опорного напряжения 11, компаратор 12, триггер 13, интегратор 14 и генератор 15 тактовых импульсов. Повышение быстродействия и точности весов достигается за счет того, что корректирующий блок 4 и последовательно включенные первый интегратор 3 и модулятор 16 образуют адаптивный к измеряемой массе пропорционально-интегрально-дифференциальный регулятор. 1 ил.
| Цифровая система автоматической регистрации веса | 1980 |
|
SU960540A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Техническое описание. | |||
