1
Изобретение относится к области весоизмерительной техники, в частности к устройствам для взвешивания движущихся объектов, например автомобилей на ходу.
Известны устройства для взвешивания движущихся объектов, содержащие силоизмерительные и путевые датчики, подключенные через преобразователи к блоку обработки и регистрации результата 1.
Эти устройства имеют сложное конструктивное решение, обусловленное использованием в них алгоритмов обработки сигналов, требующих специальной аппаратуры.
Ближайшим по технической сущности является устройство для взвешивания движущихся объектов, содержащее силоизмерительные датчики, подключенные к блоку преобразования, соединенному с узлом определения времени взвешивания, связанному с ключами, два интегратора, генератор импульсов и регистрирующий счетчик 2.
Известное устройство не обеспечивает требуемую точность и конструктивно сложно, так как в нем второй интегратор подключен к источнику сигнала через ключ, связывающий его со сдвигом на половину периода динамической помехи после подключения первого интегратора, что требует Знания частоты помехи.
Поэтому хорошо подавляется только помеха, на частоту которой заранее настроено устройство.
Так как частота динамической составляющей не постоянна, то при ее изменении возникает погрешность. Устройство требует для реализации применения прецизионного блока аналоговой задержки и презиционного устройства задания времени измерения. Возмолша потеря полезной информации при времени нахождения объекта на участке взвешивания, меньшем заранее установленному времени измерения, что ограничивает максимальную скорость движения.
Цель изобретения - повышение точности измерения и упрощения устройства.
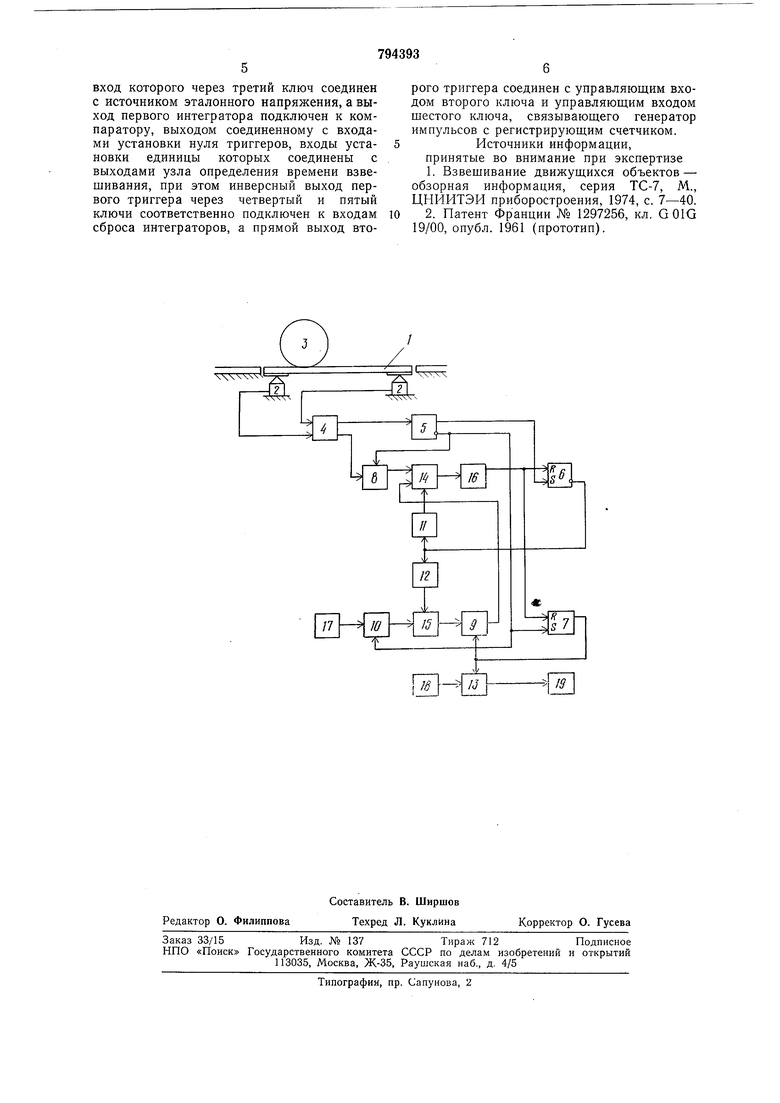
Поставленная цель достигается тем, что в устройство введены источник эталонного напряжения, компаратор и два триггера, причем один вход первого интегратора через первый ключ подключен к выходу блоку преобразования, его другой вход через второй ключ связан с выходом второго интегратора, вход которого через третий ключ соединен с источником эталонного напряжения, а выход первого интегратора подключен к компаратору, выходом соединенному с входами установки нуля триггеров, входы установки единицы которых соединейены с выходами узла определения времени взвешивания, при этом инверсный выход первого триггера через четвертый и пятый ключи соответственно подключен к входам сброса интеграторов, а прямой выход второго триггера соединен с управляющим входом второго ключа и управляющим входом шестого ключа, связывающего генератор импульсов с регистрирующим счетчиком. На чертеже показана функциональная схема устройства. Устройство содержит грузоприемную платформу 1, опирающуюся на силоизмерительные датчики 2, воспринимающие вес движущегося объекта 3 и подключенные к блоку 4 преобразования, связанному с узлом 5 определения времени взвещивания, соединенному с триггерами 6 и 7. Устройство содержит также первый ключ 8, второй ключ 9, третий ключ 10, четвертый ключ 11, пятый ключ 12, щестой ключ 13, первый интегратор 14, второй интегратор 15, компаратор 16, источник 17 эталонного напряжения, генератор 18 импульсов и регистрирующий счетчик 19. Устройство работает следующим образом. При въезде объекта 3 на платформу 1 изменяется электрический сигнал на выходе силоизмерительных датчиков 2. Сигналы датчиков 2 обрабатываются блоком 4 и подаются на узел 5, сигнал с выхода которого замыкает ключи 8 и 10 и переключает триггер 6, размыкающий ключи 11 и 12. Через ключ 8 на вход интегратора 14 поступает напряжение с выхода блока 4, пропорциональное сумме нагрузки на силоизмерительные датчики 2, а через ключ 10 на вход интегратора 15 поступает напряжение источника 17. В течение времени нахождения объекта на грузоподъемной платформе 1 первый интегратор 14 интегрирует сигнал с наложенной на него помехой и, {(A + Bs n2T:Ft)dt-AT + (l-cos2 FT), где L/i - напряжение на выходе первого интегратора по окончании взвешивания объекта; А - напряжение полезного сигнала; В - амплитуда динамической составляющей;F - частота динамической составляющей;Т - время нахождения объекта на грузоприемной платформе 1. Второй интегратюр 15 осуществляет интеррирование сигнала источника 17 за время Т нахождения объекта 3 на грузоприемной платформе и необходим для деления напряжения Ui первого интегратора на напряжение, пропорциональное времени Т. При съезде движущегося объекта 3 с платформы 1 размыкаются ключи 8 и 10 и переключается триггер 7, замыкающий ключи 9 и 13. Через ключ 9 на вход интегратора 14 поступает выходное напряжение интегратора 15. Через ключ 13 импульсы генератора 18 поступают на вход счетчика 19. Когда напряжение на выходе интегратора 14 станет равным нулю, срабатывает компаратор 16, возвращающий триггеры 6 и 7 в исходное состояние. При этом ключи 9 и 13 размыкаются, а ключи 11 и 12 замыкаются, обеспечивая установку нулевого начального напряжения интеграторов 14 и 15. В счетчике 19 сохраняется число, пропорциональное весу движущегося объекта 3. После проведения деления получим величину Р, соответствующую весу объекта Р А-(1 -cos2T FT) Т2uFT Величина Р получается с погрешностью б, равной 8 -(1-COS ) 2«F7 Следовательно, устройство обеспечивает уменьшение погрешности измерения в 1 - cos27t/ 7 1 - где К - коэффициент уменьшения погрешности; - число периодов динамической составляющей, укладывающихся во времени измерения. Таким образом, интегрирование измеряемого сигнала, модулированного динамической помехой, происходит во все время прохождения движущегося объекта по участку взвешивания, а результат измерения выдается в виде интервала времени с выхода триггера 7, или в виде последовательности импульсов с выхода ключа 13, или в виде цифрового кода (счетчик 19). Формула изобретения Устройство для взвешивания движущихся объектов, содержащее силоизмерительные датчики, подключенные к блоку преобразования, соединенному с узлом определения времени взвешивания, связанному- с ключами, два интегратора, генератор импульсов и регистрирующий счетчик, отличающееся тем, что, с целью повышения точности измерения и упрощения устройства, в него введены источник эталонного напряжения, компаратор и два триггера, причем один вход первого интегратора через первый ключ подключен к выходу блока преобразования, его другой вход через второй ключ связан с выходом второго интегратора.
вход которого через третий ключ соединен с источником эталонного напряжения, а выход первого интегратора подключен к компаратору, выходом соединенному с входами установки нуля триггеров, входы установки единицы которых соединены с выходами узла определения времени взвешивания, при этом инверсный выход первого триггера через четвертый и пятый ключи соответственно подключен к входам сброса интеграторов, а прямой выход второго триггера соединен с управляющим входом второго ключа и управляющим входом шестого ключа, связывающего генератор импульсов с регистрирующим счетчиком.
Источники информации, принятые во внимание при экспертизе
1.Взвешивание движущихся объектов - обзорная информация, серия ТС-7, М., ЦНИИТЭИ приборостроения, 1974, с. 7-40.
2.Патент Франции № 1297256, кл. G01G 19/00, опубл. 1961 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для взвешивания движущихся объектов | 1981 |
|
SU993039A1 |
| Устройство для взвешивания движущихся железнодорожных составов | 1982 |
|
SU1089427A1 |
| Устройство для взвешивания | 1976 |
|
SU657270A2 |
| АВТОМАТИЧЕСКИЕ ВЕСЫ | 1969 |
|
SU246110A1 |
| МАССОМЕТРИЧЕСКИЙ СПОСОБ АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ ВЕСА ГРУЗА И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2148800C1 |
| Весы с электромагнитным уравновешиванием | 1987 |
|
SU1493878A1 |
| Устройство для взвешивания железнодорожного состава в движении | 1984 |
|
SU1223046A1 |
| Микропроцессорная весоизмерительная система | 1981 |
|
SU1078255A1 |
| Устройство для взвешивания транс-пОРТНыХ СРЕдСТВ | 1979 |
|
SU808865A1 |
| Устройство для взвешивания колесных транспортных средств | 1986 |
|
SU1352236A1 |
