Изобретение относится к измерительной технике и может быть использовано в условиях, где необходимо измерить натяжение гибкого движущегося органа.
Целью изобретения является повышение точности и расширение диапазона измерения.
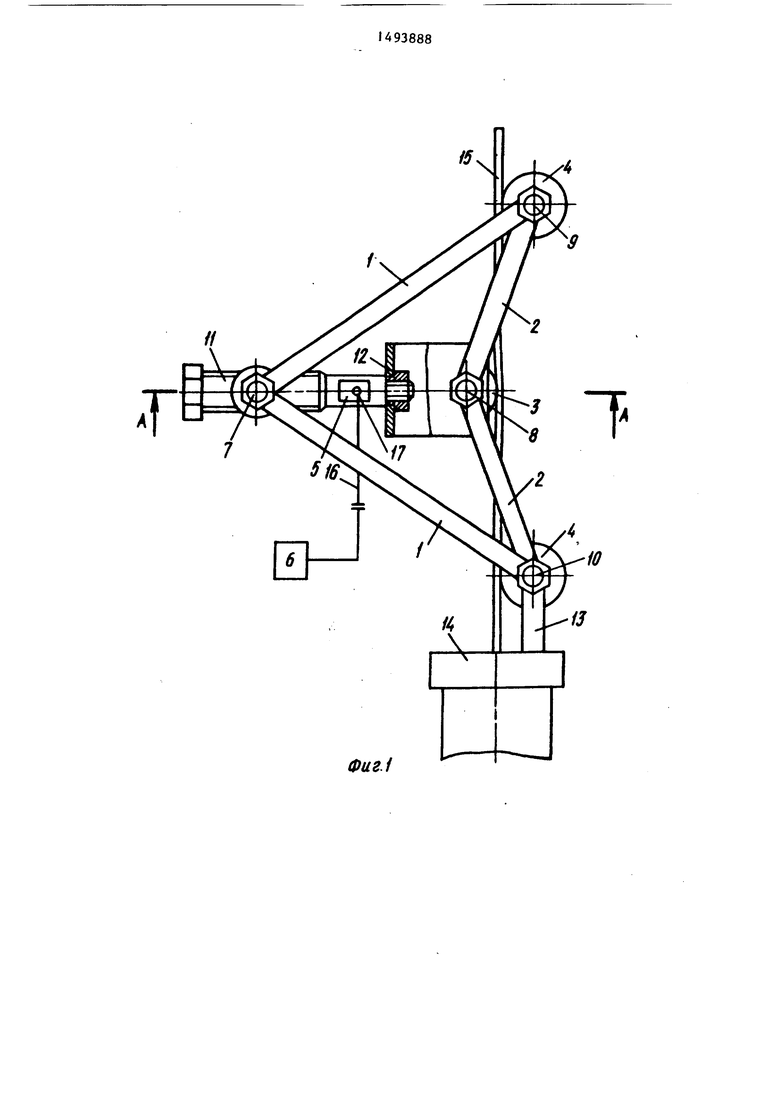
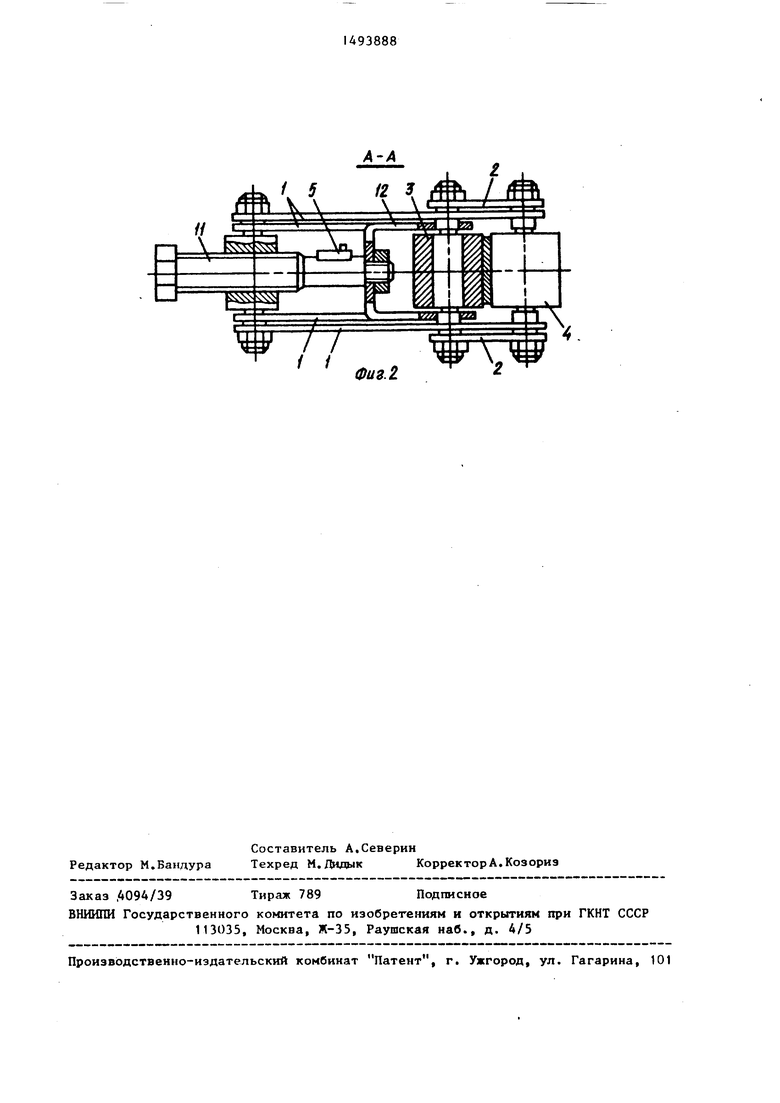
На фиг.1 изображено устройство, общий вид; на фиг.2 - сечение А-А на фиг,1.
Устройство состоит из опорной рамы, выполненной в виде симметричного сдвоенного четырехзвенника, составленного из рычагов 1 и 2, Устройство содержит также нажимной 3 и
два направляющих ролика 4, нажимной механизм, взаимосвязанный с нажимным роликом 3, преобразователь 5 нагрузки -и регистратор 6 нагрузки. Рычаги 1 и 2 связаны по концам шарнир- но осями 7-10 и закреплены гайками. Ось симметрии в четырехзвеннике проходит через оси 7 и 8. На оси 8 установлен нажимной ролик 3, а ось 7 имеет радиальное резьбовое отверстие, в которое ввинчен нажимной винт 11 нажимного механизма, который кинематически связан скобой 12 с осью 8 нажимного ролика 3. На осях 9 и 10 по обе стороны оси симметрии четырехзвенника установлены два направляю4
СО со
00 00 00
314
щнх ролика 4. Нажимной винт 11 в нижней ненарезанной цилиндрической части выполняет функцию тензобалки, на которой смонтирован преобразова- тель 5 нагрузки - тенэометрическая месдоза, соединенная с регистратором 6 нагрузки, например графопостроители Н-306. Устройство посредством стойки 13 крепится на устье скважи- ны 14 (фиг.1).ч
Устройство монтируется и работает следующим образом.
Для монтажа устройства отвинчивают гайки с одной стороны четырехзвен ника опорной рс1мы и с осей 7-10 снимают этот четырехзвенник. Затем устройство устанавливают на тяговом органе I5 путем завода двух направляющих роликов 4 с одной стороны.тяго- вого органа 15, а нажимного ролика 3 с другой его стороны (фиг.1). При этом в случае необходимости направлящие ролики 4 сдвигают навстречу друг другу вращением нажимного винта 11. Далее ранее снятый с одной стороны четырехзвенник устанавливают на свое место, закрепляют гайками, и устройство для контроля присоединяют к .стойке 13 устья скважины 14. После закрепления устройства для контроля на верхней части устьевой арматуры скважины контроль натяжения осуществляют следующим образом. До подвода нажимного ролика 3 к тяговому органу 15, например стальной ленте, присоединяют регистратор 6 нагрузки к преобразователю 5 нагрузки кабелем 16 через резьбы 17. Затем, подкручивая нажимной винт 11, доводят нажимной ролик 3 до соприкосновения с тяговым органом 15 и отмечают на масштабной бумаге регистратора 6 нагрузкк нулевой уровень. После этого протягивают тяговый орган на стрелу прогиба h, которую отсчитывают, например, по числу оборотов нажимного винта 11. Выбирая канал усиления, добиваясь необходимого масш
таба записи усилия, при установленной стреле прогиба h производят запись натяжения стальной ленты 15 в функции от времени. Величину натяжения Р„ гибкого натягового органа определяют по формуле
F.1 F.IF
н 4h 4t-n k
где F - равнодействующая сила на нажимном ролике;
1 - расстояние между направляющими роликами;
h - стрела прогиба тягового органа;
t - шаг нажимного винта;
п - число шагов нажимного винта при прогибе стальной ленты;
k - коэффициент передачи силы.
При подключении выходного сигнала устройства к системам телемеханики устройство работает э стационарном режиме, обеспечивая стационарный контроль параметров скважины.
Формула изобретения
Устройство для измерения натяжения движущегося гибкого органа, содержащее опорную раму с нажимным и двумя направляющими роликами, нажимной механизм с преобразователем нагрузки, отличающ.ееся тем, что, с целью повыщения точности
и расщирения диапазона измерения, опорная рама выполнена в виде симметричного щарнирного рычажного четы- рехзвенника, два щарнира которого, лежащие по оси симметрии, кинематически связаны с нажимным механизмом так, что преобразователь нагрузки J расположен между щарнирами, на одном из которых закреплен нажимной ролик, а каждый из направляющих роликов закреплен соответственно на двух других шарнирах, расположенных симметрично относительно оси симметрии.
Фиг.1
V
А-А
I
v .i4 А
с . г. .- .2
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля натяжения движущегося органа с приводом от ведомого барабана | 1987 |
|
SU1500879A1 |
| Способ диагностики отложений асфальтосмолопарафиновых веществ в скважине при добыче нефти | 1988 |
|
SU1717798A1 |
| ПОДЪЕМНОЕ УСТРОЙСТВО | 2024 |
|
RU2835700C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ НАТЯЖЕНИЯ ДВИЖУЩЕГОСЯ ГИБКОГО ТЯГОВОГО ОРГАНА ДЛИННОХОДОВОЙ НАСОСНОЙ УСТАНОВКИ | 1996 |
|
RU2128287C1 |
| НАТЯЖНОЕ УСТРОЙСТВО ЛЕНТОЧНОГО ТРАНСПОРТЕРА, ПРЕИМУЩЕСТВЕННО ТУННЕЛЬНЫХ СУШИЛЬНЫХ УСТАНОВОК НЕПРЕРЫВНОГО ДЕЙСТВИЯ | 1996 |
|
RU2116232C1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСИЛИЯ НАТЯЖЕНИЯ КАНАТА ГРУЗОПОДЪЕМНОГО МЕХАНИЗМА (ВАРИАНТЫ) | 2006 |
|
RU2326802C1 |
| Устройство для измерения усилия натяжения гибких элементов | 1981 |
|
SU1068743A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ НАТЯЖЕНИЯ ОТТЯЖЕК ОПОР ВОЗДУШНЫХ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ | 2003 |
|
RU2256891C1 |
| Устройство для возведения рамной крепи | 1985 |
|
SU1273577A1 |
Изобретение относится к измерительной технике и может быть использовано в установках, где необходимо измерить натяжение гибкого движущегося органа. Целью изобретения является повышение точности и расширение диапазона измерения. Цель достигается тем, что опорная рама выполнена в виде симметричного шарнирного рычажного четырехзвенника, два шарнира которого, лежащие на оси симметрии, кинематически связаны с нажимным механизмом, создающим в процессе измерения необходимый изгиб гибкого органа при измерении усилия изгиба, по которому судят о натяжении гибкого органа. Изгиб органа создается с помощью нажимного ролика, закрепленного на шарнире на оси симметрии, и двух направляющих роликов, закрепленных каждый соответственно на шарнирах, расположенных симметрично относительно оси симметрии. 2 ил.
