L±J
/(;
i (Л
QD 00
314
снабжен формирователем 5 заданной ЭДС, пропорциональной частоте вращения, формирователем 7 модулирующего сигнала, пороговым элементом 6, элементами ЗАПРЕТ 19, 21-26, коммутаторами 15, 16, задатчиком 17 минимального угла управления и апериодическим эвеном 18, регулятором ЭДС 14, вычислителем 11 модуля ЭДС и сумматором 10. Входы формирователей 5, 7 и порогового элемента 6 подключены к выходу задатчика интенсивности 4. Апериодическое звено 18 включено между выходом и вторым входом коммутаторов 15, 16 соответственно, управляющие входы которых соединены с выходом порогового элемента 6. Второй информационный вход коь тутатора 15 подключен к выходу задатчика 17, а первые информационные входы коммутаторов 15, 16 подключены к выходу регулятора ЭДС 14,вход которого соединен с выходом сумматора 10, входы которого подключены к выходам формирователя 5 и вычислителя 11, входами соединенного с выходами датчиков тока 12 и напряжения 13 в цепи статора асинхронного
электродвигателя 3 с короткозамкну- тым ротором. Выход формирователя 7 подключен к прямому входу элемента 19, инверсный вход которого соединен с выходом порогового элемента 6, а выход - с инверсныьш входами элементов 21-26. Инверсные входы элементов 21-26 подключены к соответст- вую1дим выходам системы 20 импульсно- фазового управления, а выходы - к управляющим входам тиристорного регулятора 1 напряжения. Вход системы 20 подключен к выходу коммутатора 16 В режиме пониженной частоты вращения электропривода выходное напряжение регулятора 1 формируют посредством модуляции импульсов управления тиристорами прямоугольным сигналом U, с регулируемой частотой f и постоянной скважностью, равной половине периода сигнала U, при этом система автоматического управления электроприводом замкнута по модулю результирующего вектора ЭДС двигателя. В переходных режимах устройство управления обеспечивает плавное изменение частоты вращения электродвигателя. 2 ил J
| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-регулируемый электропривод грузоподъемного механизма | 1985 |
|
SU1365333A1 |
| Электропривод переменного тока | 1979 |
|
SU847480A1 |
| Вентильный электропривод | 1989 |
|
SU1758822A1 |
| Асинхронный электропривод для грузоподъемного механизма | 1986 |
|
SU1451829A1 |
| СПОСОБ УПРАВЛЕНИЯ ЧАСТОТНЫМ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2081503C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| Способ управления тяговым электроприводом в тормозном режиме | 1986 |
|
SU1460765A1 |
| Асинхронный электропривод | 1989 |
|
SU1753576A1 |
| Способ регулирования частоты вращения электродвигателя переменного тока | 1987 |
|
SU1471277A1 |
| Электропривод шахтной подъемной машины | 1973 |
|
SU650192A1 |
Изобретение относится к электротехнике и может быть использовано в центробежных механизмах и механизмах перемещения промышленных установок. Целью изобретения является снижение потерь энергии путем плавного изменения частоты вращения в переходных режимах и упрощение управления в диапазоне низких частот вращения. Регулируемый электропривод снабжен формирователем 5 заданной ЭДС, пропорциональной частоте вращения, формирователем 7 модулирующего сигнала, пороговым элементом 6, элементами ЗАПРЕТ 19, 21-26, коммутаторами 15,16, задатчиком 17 минимального угла управления и апериодическим звеном 18, регулятором ЭДС 14, вычислителем 11 модуля ЭДС и сумматором 10. Входы формирователей 5,7 и порогового элемента 6 подключены к выходу задатчика интенсивности 4. Апериодическое звено 18 включено между выходом и вторым входом коммутаторов 15, 16 соответственно, управляющие входы которых соединены с выходом порогового элемента 6. Второй информационный вход коммутатора 15 подключен к выходу задатчика 17, а первые информационные входы коммутаторов 15,16 подключены к выходу регулятора ЭДС 14, вход которого соединен с выходом сумматора 10, входы которого подключены к выходам формирователя 5 и вычислителя 11, входами соединенного с выходами датчиков тока 12 и напряжения 13 в цепи статора асинхронного электродвигателя 3 с короткозамкнутым ротором. Выход формирователя 7 подключен к прямому входу элемента 19, инверсный вход которого соединен с выходом порогового элемента 6, а выход - с инверсными входами элементов 21-26. Инверсные входы элементов 21-26 подключены к соответствующим выходам системы 20 импульсно-фазового управления, а выходы - к управляющим входам тиристорного регулятора 1 напряжения. Вход системы 20 подключен к выходу коммутатора 16. В режиме пониженной частоты вращения электропривода выходное напряжение регулятора 1 формируют посредством модуляции импульсов управления тиристорами прямоугольным сигналом UM с регулируемой частотой FM и постоянной скважностью, равной половине периода сигнала UM, при этом система автоматического управления электроприводом замкнута по модулю результирующего вектора ЭДС двигателя. В переходных режимах устройство управления обеспечивает плавное изменение частоты вращения электродвигателя. 2 ил.
Изобретение относится к электротехнике и может быть использовано в приводах центробежных механизмов и механизмов перемещения промьшшенных установок.
Цель изобретения - уменьшение потерь энергии путем плавного измене- кия частоты вращения в переходных режимах и упрощение управления в диапазоне низких частот вращения.
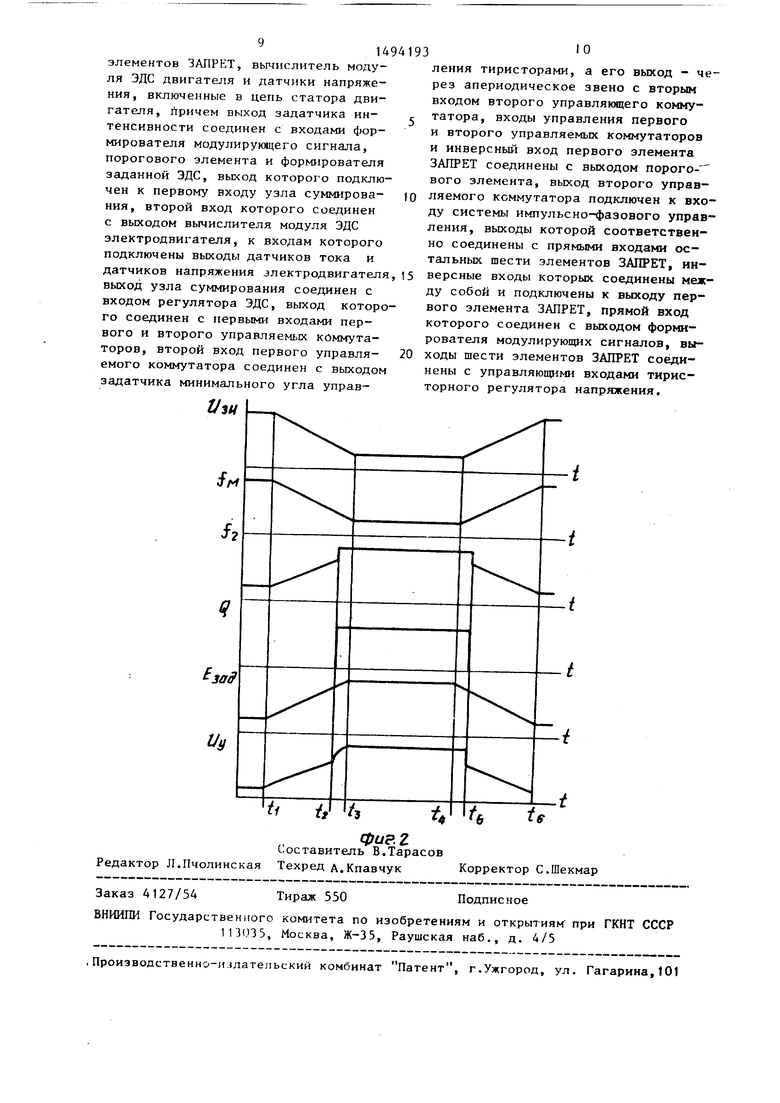
На фиг.1 представлена схема регулируемого электропривода переменного тока} на фиг,2 - временные диаграммы сигналов, иллюстрирующие его работу.
Электропривод содержит тиристор- ный регулятор 1 напряжения (фиг. 1), входами соединенньш с питающей сетью а выходами - через контактный реве- сор 2 со статорными обмотками асинхронного двигателя 3 с короткозамк- нутым ротором, задатчик 4 И1 тенсив- ности, выход которого соединен с вхо дами формирователя 5 заданной ЭДС, пропорциональной частоте вращения; порогового элемента 6 и формирователя 7 модулирующего сигнала. Формирователь 7 составлен из последовательно соединенных преобразователя 8 напряжение - частота и триггера 9. Выход формирователя 5 подключен к первому входу узла 10 суммирования, второй вход которого соединен с выходом вычислителя 11 модуля ЭДС двигателя, к входам которого подключены выходы датчиков 12 тока и датчиков 13 напряжения асинхронного электродвигателя 3 с короткозамкнутым ротором. Выход узла 10 суммирования соединен с входом регулятора 14 ЭДС электродвигателя, который соединен с информационными входами управляемых коммутаторов 15 и 16. Второй информационный вход управляемого коммутатора 15 соединен с выходом задатчика 17 минимального угла управления тиристорами, а его выход - через апериодическое звено 18, выполненное в виде RC-цепочки по Т-образной схеме, с вторым информационным входом управляемого коммутатора 16. Управляющие входы коммутаторов 15 и 16, а также инверсный -вход элемента ЗАПРЕТ 19 соединены с выходом порогового элемента 6, Система импульсно- фазовог о управления (СИФУ) 20 своим входом соединена с выходом управляемого коммутатора 16, а выходами - с прямыми входами элементов ЗАПРЕТ 21-26, инверсные входы которых соединены между собой и подключены к выходу элемента ЗАПРЕТ 19, прямой вход которого соединен с выходом триггера 9. Выходы элементов ЗАПРЕТ 21-26 соединены с управляю1цими входами ти- ристорного регулятора 1 напряжений.
Устройство управления работает следующим образом.
Выходное напряжение тиристорного регулятора 1 напряжения формируют посредством модуляции импульСов управления тиристорами прямоугольным сигналом и с регулируемой частотой д, (фиг.2) и постоянной скважностью равной половине периода сигнала U. При этом в выходном напряжении регулятора 1 напряжения наибольшую ампли- 25 в противном случае он равен нулю.
туду, кроме сетевой, имеет гармоническая составляющая с боковой частотой f f ,f д где f - частота питающе сети. Эта гармоническая составляющая является основной гармоникой выходного напряжения, т.е. определяет частоту вращения холостого хода асинхронного двигателя (поток двигателя в этом случае имеет частоту f). Форма выходного напряжения тиристорного регулятора 1 напряжения при описанном способе формирования совпадает с формой выходного напряжения тиристорного регулятора при квазичастотном управлении с прямоугольной модуляцией напряжения.
Задатчик 4 интенсивности формирует на выходе Jгинeйнyю диаграмму пуска и торможения асинхронного электродвигателя 3 с необходимым темпом его изменения частоты вращения. Выходной сиг нал U, задатчика 4 интенсивности является сигналом задания частоты вращения электродвигателя, причем максимальному значению сигнала 1} (фиг.2) соответствует минимальная (нулевая) частота вращения электродвигателя 3 и выходная частота f тиристорного регулятора 1 напряжения, а минимальног-су значению сигнала U j соответствует выходная чагто1ч fi, приблизительно равная 0,7 f. Выходной сигнал зада
чика 4 интенсивности поступает на входы формирователя 5, порогового элемента 6 и формирователя 7 сигнала и, модулирующего импульсы управления тиристорами. Частота f выходного сигнала U формирователя 7 изменяется пропорционально величине сигнала Ujj, , а скважность сигнала U(« равна половине периода сигнала UM (благодаря наличию триггера 9). Функ- циональньй преобразователь 5 осуществляет преобразование сигнала за- Дания частоты вращения п сигнал Е зад з.адания ЭДС электродвигателя 3 (фиг. 2), которьп изменяется пропорционально выходной частоте f тиристорного регулятора и обратно пропорционально входному сигналу U
зи
Вы
ходной сигнал порогового элемента 6 (представляющего собой компаратор) принимает значение 1 при величине U,j , соответствующей частоте f , приблизительно равной 0,6 и больше.
П
5
0
5
0
5
Рассмотрим работу устройства управления при работе электродвигателя на пониженной частоте вращения (интервал времени 0-t,, фиг.2), величина которой задается выходнь м сигналом задатчика интенсивности 4, В этом случае выходной сиг лал порогового элемента 6 равен нулю и управляемые коммутаторы 15 и 16 находятся в положении, показанном на фиг.1. Система автоматического управления электроприводом оказьшается замкнутой по модулю результирующего вектора ЭДС двигателя и обеспечивает поддержание постоянства потока асинхронного двигателя 3. Вычислитель модуля ЭДС 11 на основании модуляции информации датчиков 12 тока и датчиков 13 на пряжения вычисляет модуль результирующего вектора ЭДС двигателя и этот сигнал в виде сигнала обратной связи Ед сравнивается D блоке 10 сравнения с сигналом задания ЭДС двигателя Е зал Результат рассогласования поступает на вход ре- . гулятора 14 ЭДС (Л-регулятор), а через его выход через управляемый коммутатор 16 на вход СИФУ 20. СИФУ 20 преобразует входной сигнал в последовательность импульсов управления тиристорами регулятора напряжения 1, которые поступают соответственно на прямые входы элементов ЗАПРЕТ 21-26. Выходной сигнал U формирователя 7, проГщя через элемент ЗАПРЕТ 19 (выходной сигнал порогового элемента 6 равен нулю), подается, на инверсные входы элементов ЗАПРЕТ 21-26 и своим нулевым-уровнем разрешает прохождение выходных сигналов СИФУ 20 на управляющие входы тиристорного регулятора напряжения 1 .
Рассмотрим работу устройства управления при разгоне электродвигателя до максимальной частоты враще- ния (интервал времени ,фиг.2). Сигнал и. на выходе задатчика интенсивности 4 изменяется при этом от своего максимального значения (ш1И значения, соответствующего какой- либо пониженной скорости) до минимального значения, которому соответствует выходная частота f, , приблизительно равная 0,7 f ,. До момента срабатывания порогового элемента 6 устройство управления работает аналогично описанному (интервал времени t,-t 2, фиг.2), при этом частота f л, сигнала U, плавно уменьшается, а вькодная частота плавно увеличивается и происходит разгон электродвигателя 3. При этом на выходе апериодического звена 18 обеспечивается значение сигнала, равное значению выходного сигналта регулятора 14 ЭДС двигателя. При частоте f, приблизительно равной 0,6 f (момент времени t), срабатывает пороговый элемент 6 и его выходной сигнал Q становится равным 1. Этот сигнал запрещает поступление сигнала U на инверсные входы элементов ЗАПРЕТ 21-26, на которые теперь все время подается сигнал О. Одновременно единичный выходной сигнал порогового элемента 6 переключает управляемые коммутаторы 15 и 16. При этом размыкается депь обратной связи по ЭДС двигателя и на вход СИФУ 20 через апериодическое звено 18, обеспечивается плавный без больших бросков тока переход двигателя на естественную механическую характеристику (f 50 Гц), поступает выходной сигнал задатчик-ч 17 минималыюг о угла управления тиристо1). Вь1ход- ные сигнгшы СИФУ 20, провдя через элементы ЗЛ11РНТ 21-26 (на их инверсных входах сигнал равен нулю), подаются на у111 ;1вля10111.ие входы тиристир- ног о регулятора напряжения 1 .
0
5
0
5
0
5
0
5
0
5
При осуществлении торможения двигателя величина сигна;та U., в момент времени t начинает увеличиваться и в момент времени t5-достигает уровня переключения порогового элемента 6. В результате выходной сигнал Q порогового элемента 6 принимает значение О и разрешает поступление модулирующего напряжения U у, на инверсные входы элементов ЗАПРЕТ 21- 26. Асинхронный электропривод переходит в режим квазичастотног о управления. Одновременно переключаются коммутаторы 15 и 16, в результате чего замыкается обратная связь по ЭДС двигателя. После окончания интервала торможения в момент времени t шектропривод приходит в режим работы на понижен}юй частоте вращения.
Таким образом, предлагаемьсй электропривод формирует пониженную частоту вращения только за счет управления тиристорным регулятором напряжения, плавное изменение частоты вращения электродвигателя в переходных режимах обеспечивает снижение потерь энергии.
Формула изобретения Регулируемый электропривод переменного тока, содержащий асинхронный электродвигатель с короткозамкнутым ротором, тиристорньп регулятор напряжения с входными зажимами для подключения к питающей сети и выходными зажимами для подключения через контактный реверсор к выводам ста- торной обмотки асинхронного электродвигателя, датчика тока в цепи статорной обмотки, систему- импульс- но-фазового управления и задатчик интенсивности, отличающий- с я тем, что, с целью снижения потерь энергии путем плавного изменения частоты вращения в переходных режимах и упрощения управления в диапазоне низких частот вращения, в него введены формирователь модулирующего сигнала, составленный из последовательно соединенных преобразователя напряжение - частота и триггера, пороговый элемент, формирователь заданной ЭДС, пропорциональной частоте вращения, регулятор ЭДС, задатчик минимального угла управления тиристорами, апериодическое звено, два управляемых коммутатора, семь
149
элементов ЗАПРЕТ, вычислитель модуля ЭДС двигателя и датчики напряжения, включенные в цепь статора двигателя, йричем выход задатчика ин- тенсивности соединен с входами формирователя модулирующего сигнала, порогового элемента и формирователя заданной ЭДС, выход которого подключен к первому входу узла суммирова- ния, второй вход которого соединен с выходом вычислителя модуля ЭДС электродвигателя, к входам которого подключены выходы датчиков тока и датчиков напряжения электродвигателя выход узла суммирования соединен с входом регулятора ЭДС, выход которого соединен с первыми входами первого и второго управляемых коммутаторов, второй вход первого управля- емого коммутатора соединен с выходом задатчика минимального угла управФир.г
Составитель В.Тарасов Редактор Л.Пчолинская Техред А.Кпавчук Корректор С.Шекмар
Заказ 4127/54 Тираж 550Подписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
10
ления тиристорами, а его выход - через апериодическое звено с вторым входом второго управляющего коммутатора, входы управления первого и второго управляемых коммутаторов и инверсный вход первого злемента ЗАПРЕТ соединены с выходом пороге- вого злемента, выход второго управляемого коммутатора подключен к входу системы импульсно-фазового управления, выходы которой соответственно соединены с прямыми входаьш остальных шести элементов ЗАПРЕТ, инверсные входы которых соединены между собой и подключены к выходу первого элемента ЗАПРЕТ, прямой вход которого соединен с выходом формирователя модулирующих сигналов, выходы шести элементов ЗАПРЕТ соединены с управляющими входами тирис- торного регулятора напряжения.
h
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Асинхронный электропривод | 1986 |
|
SU1339864A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
