HI
L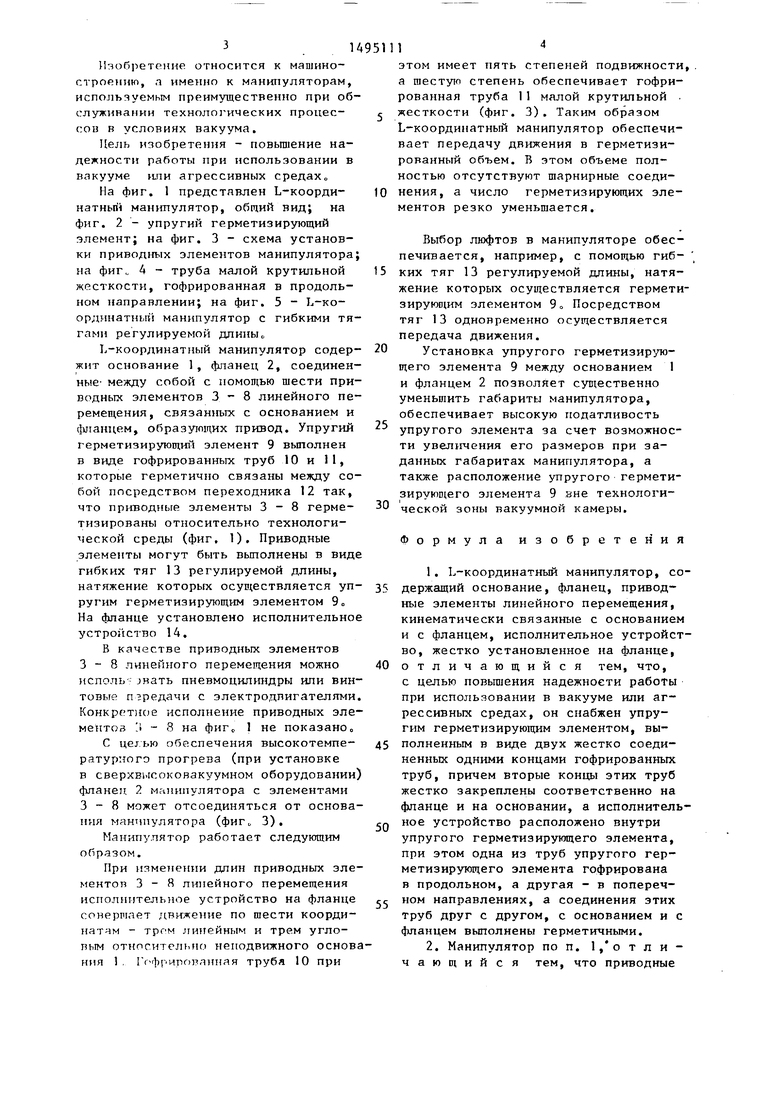
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительное устройство промышленного робота | 1985 |
|
SU1301701A1 |
| Манипулятор | 1986 |
|
SU1313686A1 |
| Манипуляционная система | 1990 |
|
SU1784451A1 |
| Способ градуировки многокомпонентных датчиков сил и моментов и устройство его реализующее | 2017 |
|
RU2637721C1 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ МИНИМАЛЬНЫХ ИНВАЗИВНЫХ ВМЕШАТЕЛЬСТВ | 2007 |
|
RU2412800C2 |
| Вакуумный манипулятор | 2018 |
|
RU2691173C1 |
| Манипулятор | 1990 |
|
SU1787761A1 |
| МАНИПУЛЯТОР С ВАКУУМНОЙ КАМЕРОЙ | 2018 |
|
RU2713999C1 |
| Вакуумный манипулятор | 2018 |
|
RU2691168C1 |
| БОЛЬШЕГРУЗНАЯ БЕРЕГОВАЯ ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ДЛЯ ПОГРУЗКИ И ВЫГРУЗКИ СПГ | 2020 |
|
RU2791762C1 |
Изобретение относится к машиностроению, а именно к манипуляторам, используемым преимущественно при обслуживании технологических процессов в условиях вакуума. Цель изобретения - повышение надежности в работе при использовании в вакууме или агрессивных средах. При изменении длин приводных элементов 3,4,5,6,7,8 линейного перемещения, установленных на основании 1 и фланце 2, исполнительное устройство 14 совершает движение по шести координатам. При этом упругий герметизирующий элемент 9 деформируется, что обеспечивается его конструктивным выполнением в виде двух гофрированных труб 10 и 11. Труба 10, выполненная с гофрированием в поперечном направлении, жестко установлена на основании и обеспечивает деформацию по пяти координатам, а труба 11, гофрированная в продольном направлении, - деформацию по шестой координате. Таким образом, координатный манипулятор обеспечивает передачу движения в герметизированный объем, причем в этом объеме полностью отсутствуют шарнирные соединения. 1 з.п. ф-лы, 5 ил.
/2 8
Фиг. 1
Изобретение относится к машиностроению, л именно к манипуляторам, используемым преимущественно при обслуживании технолш ических процес- сон в условиях вакуума.
Цель изобретения - повьпиение надежности работы при использовании в вакууме или агрессивных средах
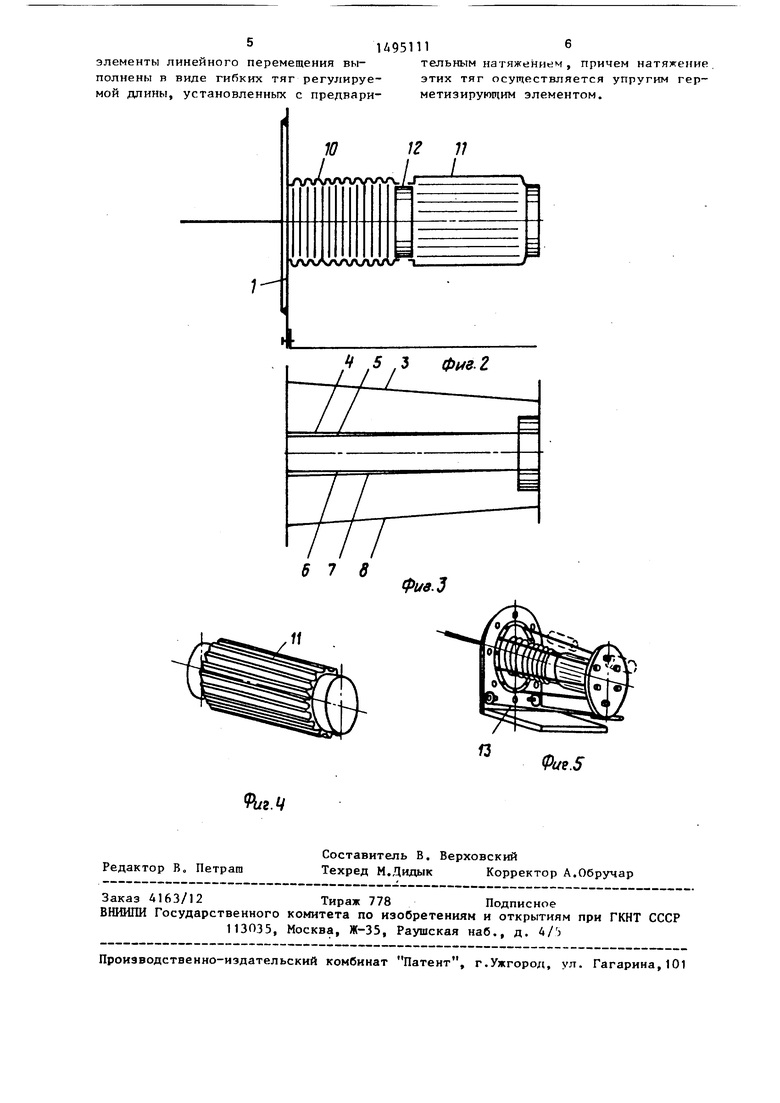
На фиг. 1 представлен L-коорди- натньш манипулятор, общий вид; на фиг. 2 - упругий герметизирующий элемент; на фиг. 3 - схема установки приводных элементов манипулятора; на фиг, А - труба малой крутильной жесткости, гофрированная в продольном направлении; на фиг. 5 - L-KO- ординатиый манипулятор с гибкими тягами регулируемой длины
L-координатный манипулятор содер- жит основание 1, фланец 2, соединенные- между собой с помощью шести приводных элементов 3-8 линейного перемещения, связанных с основанием и
(JuiaHueM, образующих привод. Упругий герметизирующий элемент 9 вьтолнен в виде гофрированных труб 10 и 11, которые герметично связаны между собой посредством переходника 12 так, что приводные элементы 3-8 герметизированы относительно технологической среды (фиг. 1). Приводные элементы могут быть выполнены в виде гибких тяг 13 регулируемой длины, натяжение которых осуществляется упругим герметизирующим элементом 9о На фланце установлено исполнительное устройство 14.
В качестве приводных элементов 3-8 линейного перемещения можно исполь jHaTb пневмоцилиндры или винтовые передачи с электродвигателями. Конкретное исполнение приводных элементов - 8 на фиг с 1 не показано
С цeJью обеспечения высокотемпературного прогрева (при установке в сверхвысоковакуумном оборудовании) фланец 2 манипулятора с элементами 3-8 может отсоединяться от основания манипулятора (фиг„ 3),
Манипулятор работает следующим образом.
При изменении длин приводных элементов 3-8 линейного перемещения исполнительное устройство на фланце соверплет движение по шести координатам - трг М линейным и трем угловым отнпситс1п чо неподвижного основания , Гг фрированная труба 10 при
0
5
0
5
0
5
0
5
1
этом имеет пять степеней подвижности, а шестую степень обеспечивает гофрированная труба 11 малой крутильной . жесткости (фиг. 3). Таким образом L-координатный манипулятор обеспечивает передачу движения в герметизированный объем. В этом объеме полностью отсутствуют шарнирные соединения, а число герметизирующих элементов резко уменьшается.
Выбор люфтов в манипуляторе обеспечивается, например, с помощью гибких тяг 13 регулируемой длины, натяжение которых осуществляется гермети- зируюп1им элементом 9 Посредством тяг 13 одновременно осуществляется передача движения.
Установка упругого герметизирующего элемента 9 между основанием 1 и фланцем 2 позволяет существенно уменьшить габариты манипулятора, обеспечивает высокую податливость упругого элемента за счет возможности увел гчения его размеров при заданных габаритах манипулятора, а также расположение упругого гермети- зируюп;его элемента 9 вне технологической зоны вакуумной камеры.
Формула изобретен ия
с целью повышения надежности работы при использовании в вакууме или агрессивных средах, он снабжен упругим герметизирующим элементом, выполненным в виде двух жестко соединенных одними концами гофрированных труб, причем вторые концы этих труб жестко закреплены соответственно на фланце и на основании, а исполнительное устройство расположено внутри упругого герметизирующего элемента, при этом одна из труб упругого герметизирующего элемента гофрирована в продольном, а другая - в поперечном направлениях, а соединения этих труб друг с другом, с основанием и с фланцем выполнены герметичными.
51495111
элементы линейного перемещения вы- тельным натяжением, причем натяжение полнены в виде гибких тяг регуяируе- этих тяг осуществляется упругим гермой длины, установленных с предвари- метизирующим элементом.
10IZ 11
y4r /SAA/VVWX.
уллЛлллллл п
678
ч 53 ф14г.г
Фив.д
/3
Фие.5
