Изобретение относится к робототехнике, в частности к манипуляторам, предназначенным для работы в труднодоступных местах, например для выполнения окрасочных операций сложных внутренних полостей объектов.
Цель изобретения - расширение функциональных возможностей и повышение надежности.
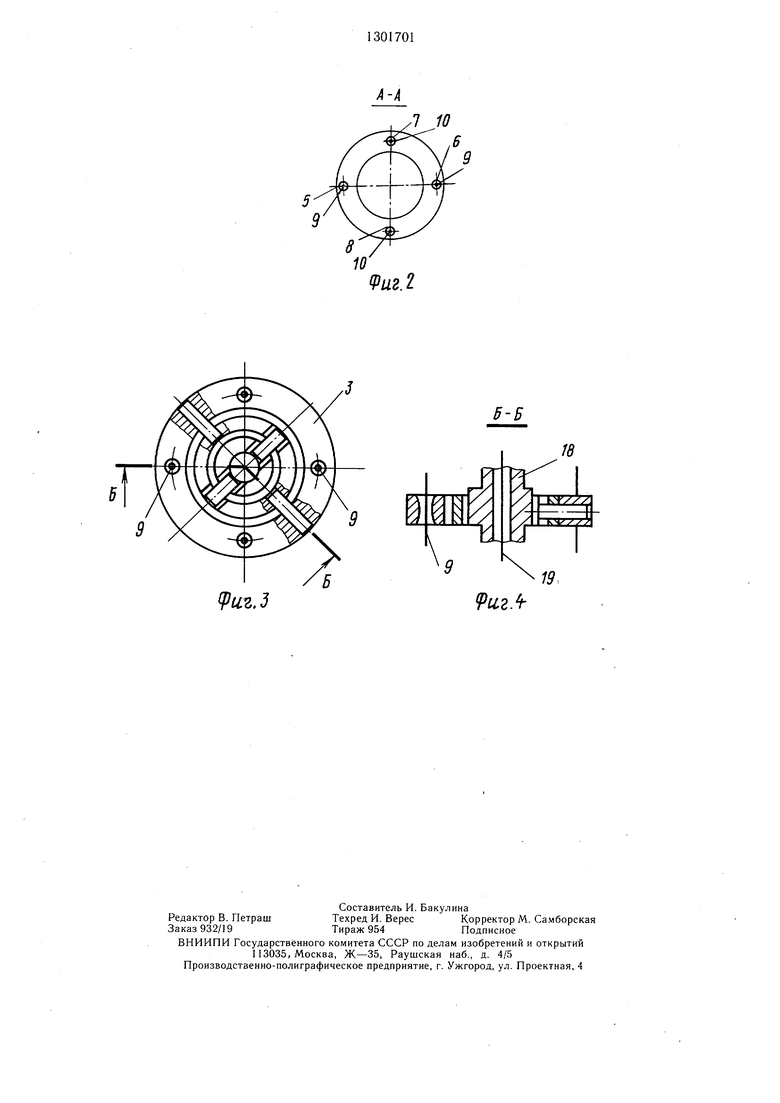
На фиг. изображено исполнительное устройство промышленного робота, общий вид; на фиг.2 - разрез А-А на фиг.1; на фиг.З - соединение полого жесткого стержня с фланцем модуля посредством шарнира Гука; на фиг.4 - сечение Б-Б на фиг.З.
Исполнительное устройство промышленного робота выполнено в виде ряда гибких секций, состоящих из последовательно соединенных идентичных модулей 1. Каждый модуль 1 выполнен в виде двух фланцев 2 и 3, соединенных между собой упругим элементом 4, причем фланцы 2 и 3 смежных модулей соединены жестко. По всей длине секции через периферийные отверстия 5-8, выполненные во фланцах, пропущены гибкие приводные тяги 9 и 10, которые одним концом жестко закреплены на фланце 2 последнего от основания модуля, а другим прикреплены к валам 11 и 12 соответствующих приводов, например двигателей 13 и 14, причем в каждом фланце 2 и 3 выполнено центральное отверстие. Каждый модуль 1 снабжен жестким стержнем 15, расположенным в центральном отверстии каждого фланца 2 и 3 и шарнирно соединяющим их. Для обеспечения пространственных перемещений фланцы модуля соединяются с жестким стержнем с помощью сферических шарниров 16-18 (фиг.1) или с помошью шарнира Гука (фиг.З).
Длины жестких стержней 15 АБ превышают расстояние ВГ между центрами шарниров 17 и 18 одного модуля 1. Соединительные жесткие стержни 15 выполняются полыми, и в их полости расположен трос 19 механизма натяжения, жестко закрепленный на фланце последнего от основания модуля, и прикреплен к основанию 20 через пружину 21 растяжения этого механизма натяжения.
Центры шарниров 16 и 17 двух смежных модулей отстоят друг от друга на расстоянии ВД, равном расстоянию ВГ между центрами шарниров 17 и 18 одного модуля 1.
Устройство работает следующим образом. Под действием управляющих моментов двигателей 13 и 14 приводятся в движение валы 11 и 12, на них наматываются соответствующие гибкие приводные тяги 10 и 9. Фланец 2 поворачивается относительно полого жесткого стержня 15, связанного с ним сферическим шарниром (шарниром Гука). В свою очередь, полый жесткий
стержень 15 поворачивается относительно фланца 3, также связанного с ним идентичным сферическим шарниром (шарниром Гука) 17. В целом фланец 2 изменяет
свое положение относительно фланца 3. Такие изменения происходят в каждом модуле гибкой секции, и, следовательно вся гибкая секция деформируется и занимает положение, показанное на фиг.1. При изменении конфигурации всей гибкой
секции вытягивается трос 19 механизма натяжения, пропущенный внутри полых жестких стержней 15. Пружина 21 механизма натяжения растягивается, и возникают усилия, стремящиеся вернуть гибкую систему в начальное положение. Эти усилия способствуют увеличению жесткости и грузоподъемности всей системы. Соотношение длин в полом жестком стержне 15 АБ ВГ увеличивает величину растяжения пружины 21 при отклонении системы от своего начального
0 положения. Равенство расстояний между центрами шарниров смежных (соседних) модулей расстоянию между центрами шарниров одного модуля ДВ ВГ (фиг.1) позволяет получить в качестве модели системы регулярную структуру. Модель представляет
5 собой стержни одинаковой длины, соединенные между собой однотипными шарнирами. Упрощается запись системы уравнений для решения задач позиционирования.
Формула изобретения
1. Исполнительное устройство промышленного робота, содержащее гибкие секции, состоящие из последовательно соединенных идентичных модулей, каждый из которых имеет два фланца, соединенные между собой упругим элементом, причем фланцы смежных модулей соединены жестко между собой, а в каждом фланце выполнены центральное и периферийные отверстия, при этом через последние проходят гибкие приводные
тяги, жестко закрепленные на последнем от основания фланца модуля и связанные с соответствуюш,ими приводами, а в центральных отверстиях этих фланцев расположен механизм натяжения, включающий трос и пружину, отличающееся тем, что, с целью
расщирения функциональных возможностей, каждый модуль снабжен полым жестким стержнем в центральном отверстии каждого фланца, шарнирно соединяющим их, при этом в полости стержня расположен трос механизма натяжения.
2. Устройство по п. 1, отличающееся тем, что, с целью повышения надежности, длина каждого полого жесткого стержня превышает расстояние между центрами шарниров модуля.
3. Устройство по п. 1, отличающееся тем, что оси шарниров смежных модулей расположены на расстоянии, равном расстоянию между центрами шарниров модуля.
1 10
Фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительное устройство промышленного робота | 1984 |
|
SU1184666A1 |
| Исполнительное устройство промышленного робота | 1984 |
|
SU1202852A1 |
| РАМА ПОЧВООБРАБАТЫВАЮЩЕГО ОРУДИЯ | 2006 |
|
RU2325792C1 |
| РОБОТОТЕХНИЧЕСКАЯ СИСТЕМА | 2013 |
|
RU2535837C2 |
| ОПОРА СЕЙСМОСТОЙКОГО СООРУЖЕНИЯ | 2010 |
|
RU2427693C1 |
| СБОРНО-РАЗБОРНАЯ ОПОРА И СПОСОБ НАТЯЖЕНИЯ ГИБКОГО ЭЛЕМЕНТА СБОРНО-РАЗБОРНОЙ ОПОРЫ | 1992 |
|
RU2018609C1 |
| Исполнительное устройство промышленного робота | 1985 |
|
SU1256954A1 |
| Стенд для испытания и аттестации промышленных роботов | 1988 |
|
SU1562130A1 |
| Развертываемая пространственная длинномерная конструкция | 1990 |
|
SU1783085A1 |
| МОДУЛЬНЫЙ МАНИПУЛЯЦИОННЫЙ РОБОТ, ПРЕДНАЗНАЧЕННЫЙ ДЛЯ ИСПОЛЬЗОВАНИЯ В ОБРАЗОВАТЕЛЬНЫХ ЦЕЛЯХ | 2023 |
|
RU2806952C1 |
Изобретение относится к робототехнике, в частности к манипуляторам, предназначенным для работы в труднодоступных местах, например для выполнения окрасочных операций внутри полостей объектов. Целью изобретения является расширение функциональных возможностей и повышение надежности. Исполнительное устройство промышленного робота выполнено в виде ряда гибких секций, состоящих из последовательно соединенных идентичных модулей 1. Каждый модуль 1 выполнен в виде двух фланцев 2 и 3, соединенных между собой упругим элементом 4. Через периферийные отверстия, выполненные во фланцах 5,6,пропу1цены гибкие приводные тяги 9 и 10, которые одним концом жестко закреплены на фланце 2 последнего от основания модуля, а другим прикреплены к соответствующим приводам. В каждом фланце выполнено центральное отверстие. Каждый модуль 1снабжен жестким стержнем 15, расположенным в центральном отверстии каждого фланца 2 и 3 и шарнирно соединяющим их. Жесткие стержни 15 выполнены полыми и в их полости расположен трос 19 механизма натяжения, жестко закрепленный на фланце последнего от основания модуля и прикрепленный к основанию 20 через пружину 21 растяжения этого механизма натяжения. 2з.п.ф-лы, 4 ил. i (Л оо о Vue.i
5-В
(Риг.з
9и,2.
| ФИКСАТОР ДЛЯ КОЛЕСА РОЛИКОВОГО ТИПА С ВЗАИМНО ПЕРПЕНДИКУЛЯРНЫМИ ОСЯМИ ВРАЩЕНИЯ | 1972 |
|
SU419421A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
