10
Изобретение относится к машиностроению, а именно к конструкциям манипуляторов.
Цель изобретения - повышение точности позиционирования, за счет снижения трения в элементах кинематической цепи.
На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - исполнительное устройство манипулятора; на фиг. 3 - вид по стрелке А на фиг. 2.
Манипулятор содержит неподвижное 1 и подвижное 2 основания, захватный орган 3, закрепленный на подвижном основании 2, и приводную систему, выполненную из шести исполнительных устройств 4-9, которые связывают неподвижное 1 и подвижное 2 основания по структуре L-координат. Каждое из шести исполнительных устройств шарнирно связано с соответствующими основаниями. Каждое из исполнительных устройств 4-9 выполнено в виде вилки 10 и перегородки 11, жестко связывающей меж- 20 ду собой оба конца вилки. При этом в перегородке 11 имеются направляющие отверстия 12. Кроме того, исполнительное устройство имеет не менее двух стержней 13 и 14с фланцами 15 и 16, образующими жесткую раму, причем стержни 13 и 14 размещены в направляющих отверстиях перегородки 11, а также две 5-образные упругие криволинейные трубки 17 и 18, закрепленные одними концами 19 и 20 с противоположных сторон перегородки 11, а другими концами 21 и 22 на фланцах 15 и 16. Шарниры выполнены в виде витых упругих оболочек 23 и 24. Перекладина 25 вилки 10 связана с неподвижным основанием 1 посредством витой упругой оболочки 23. Фланец 15 связан с подвижным основанием 2 посредством витой упругой оболочки 24. Приводная система снабжена источником энергоносителя 26 с подводящими каналами 27 и 28 связанными с полостями 5-образных упругих криволинейных трубок и витых упгии 26 по подводящему каналу 28 в S-об- разную упругую криволинейную трубку 17 происходит ее деформация и повышение осевого габарита, например, исполнительного устройства 4. При подаче жидкости или газа через источник энергии 26 по подводящему каналу 27 в S-образную упругую криволинейную трубку 18 происходит ее деформация и уменьшение осевого габарита исполнительного устройства 4. Таким образом, происходит изменение осевых габаритов всех исполнительных устройств 4-9, а следовательно, перемещение по заданному закону в пространстве подвижного основания 2, которое в данном случае имеет 5 шесть степеней подвижности. Витые упругие оболочки 23 и 24 создают возможность поворота исполнительного устройства 4 относительно неподвижного I и подвижного 2 оснований в местах крепления этих оболочек, при этом устранены значительные узлы трения.
25
30
35
Формула изобретения
Манипулятор, содержащий неподвижное и подвижное основания, захват, закрепленный на подвижном основании, и приводную систему, имеющую шесть исполнительных устройств, конць которых шарнирно связаны соответственно с неподвижным и подвижным основаниями, отличающийся тем, что, с целью повышения точности позиционирования за счет снижения трения в элементах кинематической цепи, каждое исполнительное устройство выполнено в виде вилки, перегородки, жестко связывающей оба конца вилки и имеющей направляющие отверстия, стержней с фланцами, образующими между собой жесткую раму, причем стержни размещены в направляющих отверстиях перегородки, и двух S-образных упругих криволинейных трубок, закрепленных одними концами с противоположных сторон перегородки, а другими концами - на фланцах.
ругих оболочек, с возможностью независи- 40 при этом шарниры выполнены в виде вимой подачи энергоносителя, например жид-тых упругих оболочек, при этом приводная
кости, газа, вакуума и т. д.система снабжена источнико.м энергоноситеМанипулятор работает следующим обра-ля с подводящими каналами, связанными
зом.с полостями соответственно S-образных упПри подаче энергоносителя, напримерругих криволинейных трубок и витых упружидкости или газа, через источник энер-гих оболочек.
0
0
гии 26 по подводящему каналу 28 в S-об- разную упругую криволинейную трубку 17 происходит ее деформация и повышение осевого габарита, например, исполнительного устройства 4. При подаче жидкости или газа через источник энергии 26 по подводящему каналу 27 в S-образную упругую криволинейную трубку 18 происходит ее деформация и уменьшение осевого габарита исполнительного устройства 4. Таким образом, происходит изменение осевых габаритов всех исполнительных устройств 4-9, а следовательно, перемещение по заданному закону в пространстве подвижного основания 2, которое в данном случае имеет 5 шесть степеней подвижности. Витые упругие оболочки 23 и 24 создают возможность поворота исполнительного устройства 4 относительно неподвижного I и подвижного 2 оснований в местах крепления этих оболочек, при этом устранены значительные узлы трения.
Формула изобретения
Манипулятор, содержащий неподвижное и подвижное основания, захват, закрепленный на подвижном основании, и приводную систему, имеющую шесть исполнительных устройств, конць которых шарнирно связаны соответственно с неподвижным и подвижным основаниями, отличающийся тем, что, с целью повышения точности позиционирования за счет снижения трения в элементах кинематической цепи, каждое исполнительное устройство выполнено в виде вилки, перегородки, жестко связывающей оба конца вилки и имеющей направляющие отверстия, стержней с фланцами, образующими между собой жесткую раму, причем стержни размещены в направляющих отверстиях перегородки, и двух S-образных упругих криволинейных трубок, закрепленных одними концами с противоположных сторон перегородки, а другими концами - на фланцах.
при этом шарниры выполнены в виде виВид/I
Р
фие.1
74X
/J
//
12
10
Фиг.З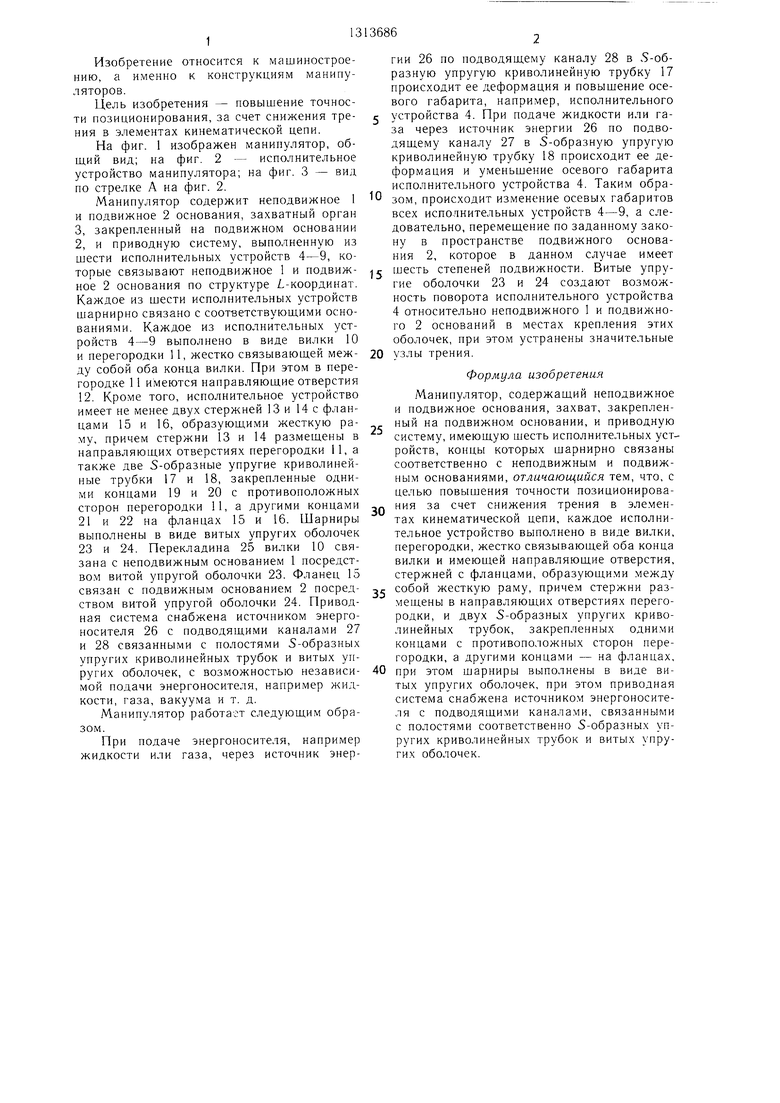
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган манипулятора | 1984 |
|
SU1187980A1 |
| ИСПОЛНИТЕЛЬНЫЙ ОРГАН МАНИПУЛЯТОРА | 1992 |
|
RU2008195C1 |
| Манипулятор | 1985 |
|
SU1278199A1 |
| Автономный мобильный модуль роботизированного хирургического инструмента | 2019 |
|
RU2715684C1 |
| L- координатный манипулятор | 1988 |
|
SU1495111A1 |
| СПОСОБ ДОБЫЧИ ПОЛЕЗНЫХ ИСКОПАЕМЫХ НА АСТЕРОИДЕ С ПОМОЩЬЮ ИСКУССТВЕННОГО ОСВЕЩЕНИЯ | 2014 |
|
RU2586437C1 |
| МАШИНА ДЛЯ ИЗГОТОВЛЕНИЯ ЭЛЕКТРИЧЕСКИХ ЛАМП НАКАЛИВАНИЯ И ТОМУ ПОДОБНЫХ ПРИБОРОВ | 1926 |
|
SU45554A1 |
| Вакуумный манипулятор | 1985 |
|
SU1301602A1 |
| УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ ПОЖАРА НА ГРУЗОВОМ ТРАНСПОРТНОМ СРЕДСТВЕ | 2022 |
|
RU2787575C1 |
| Устройство для взаимного центрирования деталей типа крестовины и фланца-вилки | 1989 |
|
SU1606306A1 |
Изобретение относится к машиностроению, а именно к конструкциям манипуляторов. Целью изобретения является повышение точности позиционирования за счет снижения трения в элементах кинематической цепи. Для этого приводная система имеет шесть исполнительных устройств, которые связывают неподвижное 1 и подвижное 2 основания. Каждое исполнительное устройство имеет вилку, перегородку 11, стержни с фланцами 15 и 16, образующие раму, две S-образные упругие криволинейные трубки 17 и 18. S-образные упругие криволинейные трубки 17 и 18 закреплены одними концами 19 и 20 с противоположных сторон перегородки 11, а другими концами 21 и 22 - соответственно на фланцах 15 и 16. Шарниры выполнены в виде витых упругих оболочек и обеспечивают связь перекладины вилки с неподвижным основанием , а фланца 15 - с подвижным основанием 2. Приводная система снабжена источником энергоносителя 26 с подводящими каналами 27 и 28, связанными с полостями S-образных упругих криволинейных трубок и витых упругих оболочек с возможностью независимой подачи энергоносителя. Например, при подаче энергоносителя в S-образную криволинейную трубку 17 происходит ее деформация и повышение осевого габарита соответствующего исполнительного устройства. 3 ил. g 00 со 0 00 05
| Пространственный механизм | 1983 |
|
SU1194672A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
