- - 






| название | год | авторы | номер документа |
|---|---|---|---|
| Гибкая производственная система | 1989 |
|
SU1673397A1 |
| Структурно-гибкая производственная система | 1990 |
|
SU1775272A1 |
| Структурно-гибкая производственная система | 1990 |
|
SU1807928A3 |
| Установка для сварки автомобильных корпусов | 1989 |
|
SU1831417A3 |
| Сервисный мобильный робот и комплект монтируемых на обслуживаемых объектах устройств для обмена сменными модулями и жидкими материалами | 2023 |
|
RU2840834C2 |
| ГИБКИЙ ПРОИЗВОДСТВЕННЫЙ МОДУЛЬ | 1989 |
|
RU2014201C1 |
| СТЫКОВОЧНОЕ УСТРОЙСТВО ПРЕИМУЩЕСТВЕННО ДЛЯ КОСМИЧЕСКИХ ОБЪЕКТОВ | 2000 |
|
RU2191149C2 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ МИНИМАЛЬНЫХ ИНВАЗИВНЫХ ВМЕШАТЕЛЬСТВ | 2007 |
|
RU2412800C2 |
| Устройство для забора и подачи воды к дождевальным машинам в движении | 1985 |
|
SU1299547A1 |
| Автономный мобильный модуль роботизированного хирургического инструмента | 2019 |
|
RU2715684C1 |







1
(21)4851460/08 (22) 16.07.90 (46)30.12.92. Вюл. № 48
(71)Ленинградский политехнический институт им. М.И.Калинина
(72)А. Н.Тимофеев
(56)Марш П. и др. Не счесть у робота профессий, (Пер. с англ.)/Под ред. В.С.Гурфин- келя. М.: Мир, 1987, с. 132-143.
(54) МАНИПУЛЯЦИОННАЯ СИСТЕМА
(57)Использование: при создании средств манипулирования для технологических, монтажных, ремонтных и контрольных работ в экстремальных условиях открытого
космоса, подземных, высотных, послеаеа- рийных. Приводы включают двигатель 9, редуктор 10, датчик 8, объединенные в общий мобильный блок, имеющий возможность перемещения по звеньям 3 манипулятора, а также поочередной стыковки с его шарнирами 4, оснащенными управляющими тормозами 5. Перемещение осуществляется по направляющим или перешагиванием по шарнирам. Мобильный блок оснащен средством его фиксации на шарнирах, приводами тормозов, средствами стыковки с управляющими и энергетическими каналами манипулятора. 11 з.п. ф-лы, 15 ил.
СГЗ К-II t-rdJ
VI
00
fc
СЛ
Фиг.1
Изобретение относится к машиностронию и может быть использовано при созда- ии средств манипулирования для онтажных, строительных, ремонтных и онтрольных операций в экстремальных усовиях.
В качестве прототипа предполагаемого изобретения выбрана дистанционно управяема манипуляцй ннай система транс- орГного укЬс Мического корабля MHorop a §offoW использования. Б этом манипуляторе звёнья бЬ льшой npof яже нности соединены кинематическими парами, оснащенными редукторами, двигателями и датчиками обратных связей.
К недостаткам подобной системы относятся значительные габариты и массы конструкции и большие затраты энергии на их перемещение. Длинные звенья снижают до- Точность позиционирования. Минимизация степеней подвижности ограничивает маневренность системы. Наиболее ответственные компоненты - привода манипулятора непрерывно находятся под воздействием агрессивных сред - низких температур, вакуума, радиации и т,п, Это снижает надежность системы. Встроенное оформление приводов затрудняет их ремонт.
Целью изобретения является уменьшение массы, габаритов, стоимости, энергопотребления, расширения функциональных возможностей, гибкости и ман ёвренности, повышение несущей способности, точности, жесткости, устойчивости к воздействию агрессивных сред за счет многоцелевого использования мобильного приводного устройства.
С этой целью в манипуляционной систе- ме с мобильным приводом, содержащей манипулятор со звеньями, соединенными кинематическими парами, и устройства приводов, включающие двигатель, редуктор с выходным звеном, тормоз й корпус, по меньшей мере часть приводов объединены в общий мобильный блок, выполненный с возможностью перемещения по манипулятору, поочередного взаимодействия и привода в движение кинематических пар манипулятора, оснащенный управляемыми тормозами.
мобильный блок содержит приводной узел, выходное звено которого оснащено стыковочным устройством, выполненным с возможностью взаимодействия и однозначной фиксации на компонентах шарниров манипулятора;
мобильный блок оснащен схватом, на пальцах которого установлены ролики, выполненные с возможностью взаимодействия и перемещения по направляющим, установленным на звеньях манипулятора, причем по меньшей мере часть роликов соединены с приводом, а схват связан с
приводным блоком дополнительным манипулятором;
мобильный блок содержит два привод- ных узла с параллельными осями вращения выходных звеньев; корпуса приводных уз0 лов связаны с возможностью перемещения вдоль осей вращения выходных звеньев; длины звеньев манипулятора равны расстоянию между осями выходных звеньев мобильного блока;
5 на звеньях манипулятора размещены дополнительные базирующие поверхности, выполненные с возможностью взаимодействия со стыковочными устройствами приводных блоков и удаленные от шарниров
0 манипулятора на дистанцию, равную расстоянию между осями вращения выходных звеньев приводных узлов;
мобильный блоку оснащен дополнительным приводным устройством, выходное
5 ведущее звено которого выполнено с возможностью взаимодействия и перемещения входных ведомых звеньев тормозов кинематических пар манипулятора одновременно с фиксацией стыковочного утс0 ройства мобильного блока на манипуляторе;
приводной узел оснащен двумя устройствами стыковки, выполненными с возможностью одновременной однозначной
5 фиксации выходного ведущего звена и корпуса приводного узла, соответственно, относительно вала и втулки шарнира манипулятора.
стыковочное устройство мобильного
0 блока оснащено зажимными элементами, выполненными с возможностью взаимодействия и перемещения входных ведомых звеньеа тормозов кинематических пар манипулятора одновременно с взаимодейст5 вием базирующих поверхностей вышеупомянутого стыковочного устройства с манипулятором;
кинематические пары манипулятора выполнены в виде кинематических соедине0 ний с по меньшей мере двумя степенями свободы;.
мобильный блок оснащен средствами измерения положения смежных звеньев манипулятора относительно своего корпуса и
5 выходного звена;
на манипуляторе размещены коммуникации и разъемы каналов управления и энергетического питания мобильного блока, а стыковочные устройства последнего оснащены ответными разъемами, выполненными с возможностью взаимодействия и стыковки с вышеупомянутыми разъемами манипулятора;
приводной узел оснащен по меньшей мере двумя выходными звеньями со стыковочными устройствами, связанными разделительными механическими передачами;
входные ведомые звенья манипулятора, выполненные с возможностью взаимодействия и перемещения стыковочными устройствами мобильного блока, соединены с кинематическими парами манипулятора механическими передачами;
содержит по меньшей мере два манипулятора;
содержит по меньшей мере два мобильных блока;
мобильный блок оснащен средством для транспортирования,
На фиг. 1 - показана принциальная функциональная схема манипуляционной системы с мобильным приводом (МСМП); на фиг. 2 - средство перемещения приводного узла по манипулятору; на фиг. 3 - МСМП с мобильным блоком, содержащим два приводных узла, а - вид сбоку, б - план; на фиг, 4 - МСМП с дополнительным приводным устройством тормозов кинематических пар; на фиг. 5 - МСМЛ с приводом тормозов от стыковочного устройства; на фиг. 6- МСМП с измерением положения звеньев манипулятора; на фиг. 7 - схема измерения положения звеньев манипулятора; на фиг, 8 - коммуникации и разъемы каналов управления и энергетического питания мобильного блока; на фиг. 9 - МСМП с двумя выходными звеньями приводного узла- на фиг. 10 - МСМП с передачами, встроенными в шарниры манипулятора; на фиг. 11 - МСМП с двумя мобильными блоками; на фиг. 12 - МСМП для вывода технологического манипулятора в рабочую зону; на фиг. 13-МСМП для вывода человека-оператора в рабочую зону на поверхности объекта-носителя; на фиг. 14 - МСМП для перемещения тяжелых объектов; на фиг, 15 - стадии привода манипулятора мобильным блоком.
Манипуляционная система с мобильным приводом (МСМП) образована манипулятором 1 и мобильным блоком 2 (фиг. 1). Манипулятор состоит из звеньев 3, соединенных кинематическими пэрами 4, например, поступательными направляющими или шарнирами, оснащенными управляемыми тормозами 5. Мобильный блок включает средство 6 для перемещения по манипулятору и приводной узел 7, содержащий датчики 8 обратных связей, двигатель 9, редуктор 10, выходное звено 11 стыковочное устройство 12. Последнее выполнено с
возможностью взаимодействия и привода в движение кинематических пар манипуля- - тора.
Средство 6 перемещения мобильного 5 блока 2 выполнено с возможностью переноса приводных узлов 7 и поочередной пристыковки к компонентам (валу или втулке) кинематических пар манипулятора. Реализация средства передвижения б возможна
10 на основе различных принципов.
Например, каретка 13 с приводными роликами 14, опирающимися на направляющие 15, установленные на звеньях манипулятора (фиг. 2). Для обхода шарнира
5 манипулятора неприводные ролики 16 установлены на качающемся пальце 17, оснащенным своим приводом 18. Каретка связана с приводным узлом 7 двухстепенным дополнительным манипулятором 19,
0 Малые габариты, масса и простота мобильного блока достигается при его передвижениипоманипуляторуперешагиванием, Такой Мобильный блок содержит два приводных узла 7 с параллель5 ными осями вращения выходных звеньев 11, оснащенных стыковочными устройствами 12 (фиг. 3). Последние выполнены с возможностью взаимодействия и однозначной фиксации на компонентах шарниров 4 ма0 нипулятора - валах или втулках. Причем для облегчения стыковки с манипулятором корпуса приводных узлов связаны с возможностью перемещения вдоль осей вращения выходных звеньев 11. Подобная связь мо5 жет реализоваться поступательной парой или ее шарнирно-рычажнЫм аналогом. ;
Длина звеньев манипулятора, равная расстоянию R между осями выходных звень0 ев 11 мобильного блока наиболее благоприятна для полного использования возможностей приводного блока и удобства его стыковки с манипулятором (фиг. 36). Из компоновочных или функциональных сооб5 ражений длины звеньев манипулятора могут отличаться от межосевого расстояния мобильного блока. В этом случае на звенья манипулятора размещаются дополнительные базирующие поверхности 20, выпол0 ненные с возможностью взаимодействия со стыковочными устройствами 12 приводных блоков 7. Эти поверхности 20 удалены от шарниров 4 манипулятора на дистанцию, равную расстоянию R между осями враще5 ния выходных звеньев 11 приводных узлов 7. Они подобны по размерам и форме стыковочным поверхностям шарниров манипулятора и выполнены с возможностью однозначной фиксации на них стыковочных устройств мобильного блока.
В кдрпусе21 приводного узла на опорах 22 вращения установлено выходное ведущее звено - стакан 23 (фиг. 4). На этом корпусе закреплены также двигатель 9 с датчиком положения и скорости 8. Редуктор, в данном примере волновой, состоит из неподвижного жесткого зубчатого колеса 24 корпуса 21, подвижного жесткого зубчатого колеса 25 стакана 23, гибкого зубчатого колеса 26 с генератором деформаций 27 на валу двигателя 9.
Стыковочное устройство выходного звена образовано базирующими поверхностями и зажимным механизмом.
Базирующие поверхности включают фланец 28 гладкий или с мелкими зубьями и базирующий поясок 29 с конической заход- ной частью. Для центрирования и угловой фиксации в плоскости фланца на нем могут быть размещены также базирующие штифты 30.
Зажимной механизм включает двигатель 31 с редуктором 32, стакан 33 с кулачковыми профилями, промежуточная плита 34, выходная плита 35 с зажимными элементами 36 в виде крюков, Последние установлены в опорах вращения 37 на выходной плите 35 и пружинами 38 прижаты к радиальному кулачковому профилю 39 стакана 33. Выходная плита 35 на тарельчатых пружинах 40 подвешена на промежуточной плите 34, Последняя роликами 41 опирается на торцевой профиль 42 стакана 33 и поступательной парой 43 зафиксирована от поворота.
Профильный стакан 33 зубчатыми передачами 44 связан с выходом редуктора 32, например, планетарного.
Фланец 28, базирующий поясок 29 и базирующий штифт 30 выполнены с возможностью взаимодействия и однозначной фиксации на ответных базирующих поверхностях вала 45 шарнира манипулятора, включающих фланец 46, охватываемый базирующий поясок 47 и отверстия 48 под базирующий штифт.
Корпуса 21 приводных узлов связаны двумя звеньями 49 на шарнирах 50, образующими параллелограммный механизм, в диагональ которого встроен привод осевой подвижности, включающий двигатель 51, червячную передачу 52, передачу винт-гайка 53, упругий компенсатор 54 и тягу 55,
Управляемые тормоза шарниров 4 манипулятора могут быть оснащены индивидуальными встроенными приводами. Однако более целесообразно их объединить и перенести на мобильный блок.
Такой мобильный блок оснащен дополнительным приводным устройством, выходное ведущее звено 56 которого выполнено с возможностью взаимодействия и перемещения входных ведомых звеньев 57 тормозов кинематических пар 4 манипулятора
одновременно с фиксацией стыковочного устройства 28, 29, 30. 36 на манипулятор 46, 47, 48.
Звенья 56 и 57 выполнены в виде сопрягаемых полумуфт сцепления. Тормоз смеж0 ных звеньев 58 и 59 манипулятора образован фрикционными фланцами 60, 61, 62, зажимным фланцем 63, диском 64 и винтом 65, связанным с полумуфтой 57. Фланец 62 установлен на звене 58,с возможностью
5 осевого перемещения, например, на упругой мембране, Перемычки, связывающие фланец 63 и диск 64, проходят сквозь пазы в вале 45. Выходное ведущее звено 56 привода тормоза через подпружиненное шли0 цевое соединение 66 и зубчатые передачи 67, редуктор 68 связано с двигателем 69, размещенным в стакане 23.
Конструкция первого и левого приводного узла мобильного блока, и соответствен5 но обозначения позиций элементов здесь идентичны,
Для повышения точности позиционирования манипулятора и разгрузки мобильного блока его приводные узлы оснащены
0 двумя устройствами стыковки (фиг. 5). Стыковочное устройство выходного звена полностью совпадает с выше описанным и содержит фланец 28, базирующий бурт 29, штифт 30, двигатель 31, редуктор 32, стакан
5 33, промежуточную плиту 34, выходную плиту 35, зажимные элементы 36. Оно выполнено с возможностью однозначной фиксации на базирующих поверхностях 46,47,48 вала 45 шарнира манипулятора.
0 Кроме того у приводного блока имеется еще одно стыковочное устройство. Оно устроено подобно первому и содержит фланец 70, базирующий бурт 71, штифт 72, двигатель 73, редуктор 74, стакан 75, выходную
5 плиту 76, зажимные элементы 77. Последние установлены в опорах вращения 78 на выходной плите 76 и пружинами 79 прижаты к кулачковому профилю 80 стакана 75.
Выходная плита 76 роликами 81 опира0 ется на торцевой профиль 82 стакана 75 и поступательной парой 83 зафиксирована от поворота. Профильный стакан 75 зубчатыми передачами 84 связан с выходом редуктора 74, установленного вместе с двигателем на
5 корпусе 21 приводного блока.
Фланец 70, базирующий пояском 71 и штифтом 72 выполнены с возможностью взаимодействия и однозначной фиксации на ответных базирующих поверхностях втулки 85 шарнира манипулятора, включающих фланец 86.охватывающий базирующий поясок 87 и отверстие 88 под штифт.
Зажимные элементы 77 выполнены с возможностью взаимодействия и перемещения входных ведомых звеньев 89 тормозов кинематических пар манипулятора одновременно с взаимодействием базирующих поверхностей 70. 71. 72 стыковочного устройства с ответными базирующими поверхностями 86, 87, 88 манипулятора.
Тормоз смежных звеньев 58 и 59 манипулятора образован фрикционными фланцами 60, 61, 62 и зажимным фланцем 63, связанным тягами 90 с входными ведомыми звеньями 89. Между зажимным фланцем 63 и несущей конструкцией звена 58 размеещ- ны тарельчатые пружины 91.
Зажимные элементы 36 и 77 оформлены в виде крюков со скошенной рабочей поверхностью 92 и 93, выполненной с возможностью взаимодействия с также скошенны ми ответными поверхностями фланца 46 и входных ведомых звеньев 89 тормозов.
Между корпусом 21 и опорами 22 установлена пружина 94, выполненная с возможностью осевого смещения выходного ведущего звена - стакана 23.
Левый приводной узел мобильного блока идентичен рассмотренному правому узлу.
В данном техническом решении однозначная фиксация и удержание стыковочными устройствами приводного узла смежных звеньев 58 и 59 манипулятора позволяет обойтись без опор вращения между ними. Здесь кинематическая пара манипулятора выполнена в виде плоского трехподвижного кинематического соединения, образованного фрикционными фланцами 60 и 61 смежных звеньев 58 и 59.
Для дальнейшего повышения точности позиционирования манипулятора за счет компенсации погрешностей стыковки приводного узла, мобильный блок оснащен средствами измерения положения смежных звеньев 58 и 59 манипулятора относительно своего корпуса 21 и выходного звена 23 (фиг. 6).
На корпусе 2 приводного узла и выходном звене 23 установлены датчики 95, например, индуктивные, выполненные с возможностью измерения положения базирующих штифтов 96, размещенных на фланцах 46, 86. Для полного определения положения в плоскости на каждом из звеньев размещены по два штифта 97, 98 и 99, 100, взаимодействующих с датчиками , 102.103, 104.105, 106 (фиг. 7). Возможны и другие средства измерения реального положения звеньев манипулятора, например, оптические.
Система управления или пульт ручного управления, а также источники энергии мо- 5 гут находиться непосредственно на мобильном блоке. Однако это не всегда возможно или целесообразно из-за увеличения массы и габаритов мобильного блока. Со стационарной системой управления 107 и источни10 ком энергии мобильный блок может быть связан гибкими кабелями. Но они снижают маневренность мобильного блока и его надежность из-за непредвиденных конфигураций.
15 Для преодоления этих недостатков на манипуляторе 1 размещены коммуникации 108 и разъемы 109 каналов управления и энергетического питания мобильного блока, а стыковочные устройства 12 последнего ос0 нащены ответными разьемами 110, выполненными с возможностью взаимодействия и стыковки с вышеупомянутыми разьемами манипулятора.
Из компоновочных или функциональ5 ных соображений часть кинематических пар манипулятора имеет ориентацию или положение, отличное от остальных кинематических пар (фиг. 9). Для привода таких кинематических пар и расширения манев0 ренности мобильного блока по крайней мере один из приводных узлов оснащен двумя выходными звеньями со стыковочными устройствами 111 и 112, связанными разделительными механическими передачами 113,
5 например, зубчатыми коническими.
Причем стыковочное устройство 112 вы-i полнено с возможностью взаимодействия и поворота звена 114 манипулятора, ось вращения которого в данном примере перпен0 дикулярна остальным кинематическим парам манипулятора. Для стыковки с мобильным блоком ось звена 114 должна быть перпендикулярна плоскости, проходящей через оси основных выходных звеньев мо5 бильного блока. На фиг. 9 эта ось и стыковочное устройство 112 условно развернуты в плоскость чертежа.
Для привода особо нагруженных и точных, а также нестандартно расположенных
0 кинематических пар в последние могут встраиваться дополнительные передачи. Часть входных ведомых звеньев 115 манипулятора, выполненные с возможностью взаимодействия и перемещения стыковоч5 ными устройствами 12 мобильного блока 2, соединены с кинематическими парами 4 манипулятора механическими передачами
. 116, например, червячными (фиг. 10). Такие передачи могут выполнять роль понижающих редукторов или пространственной пеекомпоновки. Поэтому они прежде всего страиваются в кинематические пары близие к неподвижному основанию и рабочему ргану манипулятора.
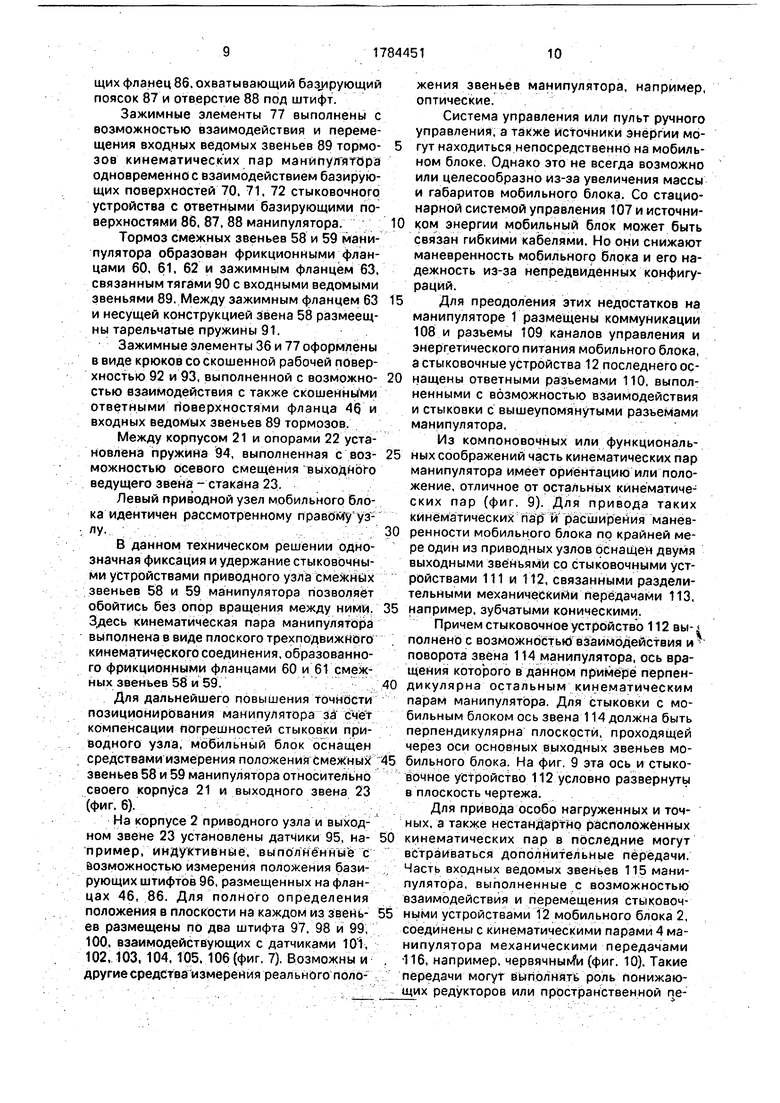
Для повышения быстродействия, мобильности и расширения функциональных возможностей МСМП содержится два или более мобильных блоков 117 и 118, выпол- ненШ с возможностью поочередного и/или одновременного взаимодействия и приведения в движение кинематических пар 119, 120, 121, 122 манипулятора 1 (фиг. 11). С этой целью кинематические пары набжаются двумя входными ведомыми звеньями 123 и 124, выполненными С воз- можностьйр взаимодействия со стьгко вочны- ми устройствами 119 приводных блоков.
МСМП предназначены прежде всего для вывода в рабочую зону человека оператора, робота, технологического или контрольного оборудования в экстремальных
УСЛОВИЯХ. ::.
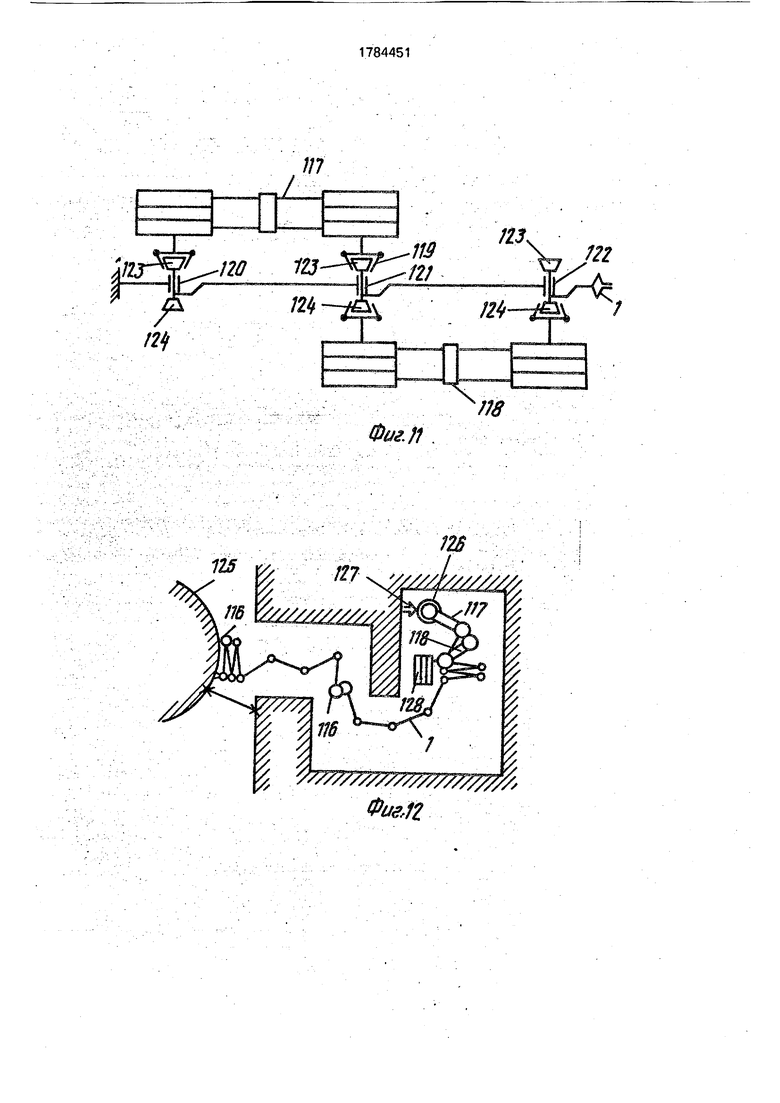
На базовом объекте-носителе 125, например транспортном средстве, установлен многозвенный манипулятор 1 с двумя мобильными блоками 117 и 118 (фиг. 12). Конечное его звено снабжено узлом кисти 126 со сменными рабочими органами 127. Одна из степеней подвижности кисти имеет входное ведомое звено, выполненное с возмохс- ностью взаимодействия и перемещения мобильным блоком. Остальные привода кисти встроены в ее конструкцию. Часть кине- матически х пар манипулятора оснащена встроенными передачами 116, а их ориентация отличается от оста л ьнШ Шарниров манипулятора. Все кинематические пары манипулятора, за исключением части кистевых, не содержат собственных приводов и оснащены тормозами.
Для расширения функциональных возможностей мобильный блок может быть оснащен средством для транспо ртироеания 128 различных объектов, и в том числе: человека-оператора 129, дополнительного технологического манипулятора и другого технологического оборудования, например, сварочного, окрасочного и т.п. Средство для транспортирования оформлено в виде платформ, фланцев, площадок, размещенных за пределами рабочей зоны манипулятора, например, над приводными блоками, и выполненных с возможностью размещения и фиксаций переносимых объектов. С мобильным блоком они связаны жестко или через дополнительный стабилизирующий механизм с одной или несколькими степенями подвижности.
Для восприятия значительных нагрузок при перемещении тяжелых объектов 128 система может содержать несколько манипуляторов 129,130 и 131 (фиг. 14). Они образуют кинематически замкнутые механизмы, отличающиеся повышенной несущей способностью, жесткостью и точностью. Наиболее полно эти эффекты проявляются при задании положения объекта в пространстве шестью манипуляторами, разворачиваемыми в прямые линии. Все манипуляторы могут оснащаться либо одним общим мобильным блоком, переходящим по дополнительным базирующим поверхностям 20, либо индивидуальными мобильными блокаМИ. , ,, . : ... .
Манипулйцирнная система с мобильным приводом (МбМП) работает следующим образом.
В исходном состоянии кинематические пары 4 манипулятора 1 зафиксированы тормозами 5. При необходимости изменения конфигурации манипулятора мобильный блок 2 с помощью средства для перемещения б подходит к шарниру 4, стыкует с ним приводной узел 7 (фиг. 1). Тормоз 5 отпускает и двигатель 9 при контроле датчиком 8- черёз редуктор 10, выходное звено 11, стыковочное устройство 12 переводит звено 3 в новое требуемое положение, в котором затем фиксируется тормозом 5. Приводной
узел 7 расстыкуется с этим шарниром и с помощью средства для перемещения 6 переносится к следующему шарниру. Так поочередно все звенья манипулятора 1 выводятся в новое требуемое положение.
При перемещении приводного узла 7 к следующему шарниру приводом 18 отводится качающийся палец 17 с неприводным роликом 16 (фиг. 2), Манипулятором 19 и вращением корпуса приводного узла относйтельно зафиксированного на манипуляторе 1 стыковочного устройства 12 каретка 13 переносится через шарнир манипулятора и устанавливается роликами 14 на направляющие 15. К этим же направляющим приводом 18 с качающимся пальцем 17 поджймэётся непрйвЪдной ролик 16.
Приводной узел 7 отпускает стыковочным устройством 12 шарнир 4 и приводными роликамиГ 14 перемещается на каретке 13
по направляющим 15 звена 3 манипулятора. Манипулятором 18 приводной узел 7 переносится через каретку 13 и устанавливается на очередной шарнир 4.
Мобильный блок 2 с двумя приводными узлами перемещается по манипулятору перешагиванием по шарнирам (фиг. 15)илидопол- кительным базам 20 (фиг. 3). В исходном состоянии мобильный блок пристыкован к манипулятору, тормоза расфиксированы.
Двигатель 9 через волновой редуктор 27, 26, 24, 25 вращает стакан 23 и через элементы стыковки 28, 46, 30, 48 поворачивает вал 45 звена 59 (фиг. 4 и 5). Угол поворота контролируется человеком-оператором или датчиком 8. Таким образом правый 132 и левый 133 приводные узлы могут одновременно приводить в движение два шарнира 134 и 135 или 136 и 137 (фиг. 15).
Затем шарниры фиксируются тормоза- ми. Двигатель 69 через цепь 68, 67, 66, 56, 57 вращает винт 65, плита 64 и связанный с ней фланец 63 зажимают фланец 61 звена 59 между фланцами 60 и 62 звена 58.
Левый приводной узел 132 отстыкуется от манипулятора. Двигатель 31 через передачи 32, 44, вращает стакан 33 (фиг. 4). Ролики 41 катятся по торцевым профилям 42, промежуточная плита 34 и связанная с ней через пружины 40 выходная плита 35, а так- же зажимные элементы 36 опускаются. Последние скользят по радиально.му кулачковому профилю 39, сжимая пружины 38 сходятся, их скошенные рабочие поверхности 92 отходят от ответных поверхностей вала 45. Фланец 28 выходного звена 23 приводного блока перестает поджиматься к фланцу 29 вала 45 звена 59. Аналогично расфиксируется корпус 21 приводного узла (фиг. 5). Двигатель 73 через передачи 74, 84 вращает стакан 75. Ролики 80 катятся по торцевым профилям 82 и плита 76, а также связанные с ней зажимные элементы 77, входные ведомые элементы 89, тяги 90, фланец 63 опускаются. Пружины 91 зажимают фланец 61 между фланцами 62 и 60. Шарнир зафиксирован тормозом. Зажимные элементы 77 скользят по радиальному профилю 80. сжимая пружины 79, отводят рабочие поверхности 93 от входных ведомых звень- ев 89. Пружина 94 приподнимает корпус 21. Фланец 70 и штифт 72 выходят из взаимодействия с фланцем 86 и отверстием 88. Корпус 21 левого приводного блока также отстыкован от манипулятора.
Левый приводной узел 132 поднимается. Двигатель 51 через червячную передачу 52 вращает винт 53, диагональ параллелограмма сокращается, звенья 49 поворачиваются по часовой стрелке, приводной узел поднят.
Затем этот узел 132 переносится от шарнира 134 к шарниру 136. Аналогично выше описанному корпус 21 правого приводного узла 133 отстыкуется от манипуля- тора. Двигатель 9 через цепь 27, 24, 25, 26 вращает корпус 21 правого приводного узла 133 относительно выходного ведущего зве- на-стакана 23, зафиксированного на вале шарнира 135. Вместе с корпусом 21 правого
приводного узла 133 вращается весь мобильный блок и левый приводной узел 132 переносится к шарниру 136 (фиг. 156). Требуемая соосность узла 132 и шарнира 136 достигается либо программным управлением в соответствии с сигналом датчика 8, либо по дополнительным датчикам или упорам на звеньях манипулятора, либо ручным управлением.
Бывший левый приводной узел 132 опускается и его выходное звено-стакан 23 стыкуется с валом 45 шарнира 136. Расстыкуется бывший правый приводной узел 133 от шарнира 135, поднимается, переносится к шарниру 137, опускается и стыкуется с последним. Корпус левого приводного узла 132 фиксируется на втулке шарнира 136. Приводные узлы 132 и 133 приводят в движение шарниры 136 и 137. Все эти переходы осуществляются подобяо выше описанным.
Такая типовая последовательность переходов характерна для приводных узлов со стыковочными устройствами выходного звена и корпуса, на фланце 70 которого имеются зубья или штифт 72. Если угловая фиксация корпуса 21 относительно манипулятора с помощью штифта 72 или зубьев отсутствует, то возможны и другие алгоритмы работы мобильного блока, и в том числе последовательный поочередный привод шарниров 134, 135, 136, 137 с соответствующим перемещением мобильного блока каждый раз на один шаг.
При необходимости повышения точности позиционирования манипулятора в процессе стыковки или после ее завершения измеряется фактическое положение вала 45 и втулки 85 смежных звеньев манипулятора 58, 59 относительно выхода 23 и корпуса 21 приводного блока (фиг. 6, 7). Датчики 101 и 102, взаимодействующие с базовыми штифтами 97 и 98 измеряют смещение втулки 85 шарнира манипулятора по оси Y и углу а . Датчик 106 - по оси X. Аналогично, датчики 104 и 105, взаимодействующие с базовыми штифтами 99 и 100 измеряют смещение вала 45 шарнира манипулятора по оси Y и углу а А датчик 106 - по оси X. Измеренные таким образом погрешности стыковки приводного узла с манипулятором используются для коррекции управления манипулятором.
Приводные блоки 7 с несколькими выходными звеньями и стыковочными устройствами 111 и 112 могут как приводить в движение обычные кинематические пары манипулятора, так и шарниры со специфическим расположением или ориентацией
(фиг. 9). Кроме того дополнительные стыковочные устройства 112 придают мобильному блоку способность пространственного маневрирования.
После фиксации стыковочного устройства 112 на шарнире или дополнительной базовой поверхности манипулятора мобильный блок может изменять свою ориентацию в пространстве. Процессы привода, перемещения и стыковки здесь подобны рассмотренным выше.
МСМР может выполнять манипуляци- онные функции в труднодоступных местах, значительно удаленных от исходной базы, прямой подход к которым недопускается различного рода препятствиями.
Базовый объект 125, несущий компактно сложенный многозвенный манипулятор 1 фиксируется на основании обслуживаемого комплекса (фиг. 12). Мобильный блок 117 перешагиванием перемещается по манипулятору. Часть лишних в данных работах звеньев, например, первые четыре, оставляются неразвернутыми. Мобильный блок своими приводными узлами стыкуется с пятым и шестым шарниром и одновременным координированным поворотом пятого и шестого звена поступательно или с разворотом перемещает всю остальную сложенную часть манипулятора. Затем он переходит на шестой и седьмой шарнир и подобным образом разворачивает следующие шестое и седьмое звенья. Манипулятор в сложенном компактном виде обходит препятствия и постепенно разворачиваясь движется к зоне выполнения технологической или контрольной операции.
После выхода в рабочую зону первый мобильный блок 117 стыкуется с кистевым механизмом и близлежащим к нему шарниром манипулятора 1. Второй мобильный блок 118 может помогать первому для увеличения маневренности, скорости или развиваемых моментов. Затем он стыкуется с шарнирами манипулятора, следующими после занятых первым мобильным блоком. Та-, ким образом на конце кинематической цепи с зафиксированными тормозами шарнирами образуется манипулятор с дистанционным, позиционным или контурным управлением. Четыре его степени подвижности приводятся в движение мобильными блоками 117 и 118. Дополнительные ориентирующие степени подвижности кисти либо поочередно приводятся мобильным блоком 1.17, либо оснащаются встроенными приводами. Такой четырех-шести степенной робот может выполнять монтажные, сборочные, сварочные, ремонтные и другие работы.
При необходимости один или оба мобильных блока в средствах транспортирования 128 могут нести различные грузы, сменные рабочие органы 127 или расходуемые материалы. Подобный комплекс может выполнять различные работы в горных выработках, судовых отсеках, высотных метал- локонструкциях, полуразрушенных в результате аварии промышленных или стро0 ительных конструкциях.
Компактно свернутый манипулятор может храниться во внутреннем отсеке носителя, например, корабля, или здания (фиг. 13). Подобно описанному выше он развора5 чивается, выходит из отсека и доставляет человека 129, робота или иное технологическое оборудование к требуемым зонам наружных поверхностей этих объектов, Подобные системы перспективны, также для
0 монтажно-ремонтных работ на большой высоте.
Мобильные блоки могут использоваться также для разворачивания складных конструкций, например, солнечных батарей, ан5 тенн и т.п. В этом случае роль манипулятора играют сами разворачиваемые конструкции.
Более тяжелые объекты, например, модули космических станций или строитель0 ные конструкции, перемещаются одним или несколькими манипуляторами 129, 130, 131 (фиг. 14). Они образуют кинематически замкнутые цепи, отличающиеся повышенной несущей способностью, жесткостью и точ5 ностью. Для сохранения подвижности таких механизмов при разворачивании манипуляторов часть их шарниров, например, первые и последние, оставляются незаторможенными. Один или несколько мобильных бло0 ков переходят по дополнительным базирующим поверхностям 20 от одного манипулятора к другому и постепенно их разворачивают. Более быстрое и координированное пространственное движение пол5 учается при одновременной работе всех трех - шести манипуляторов со своими индивидуальными мобильными блоками. Подобные системы могут применяться и в качестве средств подъема тяжелых крупно0 габаритных грузов. Раскладываемые мо- бильными блоками манипуляторы играют роль домкратов. Но от последних отличаются компактностью в исходном сложенном состоянии.
5 По сравнению с известными роботами в предлагаемой манипуляционной системе объединение приводов в общий мобильный блок решает прежде всего проблему значи- тельного снижения массы, габаритов и стоимости комплекса. Уменьшение массы
перемещаемых конструкций позволяет несколько снизить энергопотребление.
Перемещение приводов по манипулятору дает несколько эффектов. В момент раз- вертывания манипулятора привода приближены к основанию, а подвижная часть манипулятора максимально облегчена и свернута в компактную группу с малым моментом инерции. Это также снижает энергопотребление. Во время перерывов в работе мобильные блоки могут отводиться на основание в защищенную зону. Снижается длительность их пребывания в агрессивных средах, например, низких температур, вакуума, радиации и т.п. Облегчается их профилактическое обслуживание и диагностика. Возможна оперативная замена мобильных блоков на исправные. Все .это повышает надежность системы, и в том числе в условиях агрессивных сред, Появляется возможность варьирования структуры системы, и в том числе использования блоков совместно или врозь, Расширяются фун- кциональные возможности, улучшается адаптация к изменению нагрузок.
В предлагаемом манипуляторе звенья соединены фланцами, стянутыми винтами или пружинами. А конструкии, реализующие кинематические пары вынесены на мобильный блок. Подобные соединения по несущей способности и жесткости, отнесенным к массе и габаритам, а также простоте и стоимости, близки к статическим несущим конструкциям. Поэтому их характеристики многократно превышают возможности шарниров манипуляторов со встроенными приводами.
Эти свойства предлагаемого технического решения открывают возможность существенно увеличить количество степеней подвижности манипулятора в пределах тех же масс и стоимости. В результате повышается гибкость и маневренность. Компактно сложенный манипулятор проще транспортировать. Короткие звенья снижают требования по точности, жесткости и нагрузкам, предъявляемые к приводам. А накапливаемые погрешности могут компенсироваться системой измерения положения звеньев друг относительно друга или относительно обслуживаемого объекта в рабочей зоне.
Кинематически замкнутые механизмы, образуемые несколькими манипуляторами подобного рода, обладают повышенной несущей способностью, жесткостью и точностью. Особенно этому способствует прямолинейная конфигурация развернутых манипуляторов, в которой звенья воспринимают преимущественно нагрузки растяжения-сжатия.
Таким образом предлагаемая манипу- ляционная система с мобильным приводом отлмчается от аналогов меньшей массой, габаритами, стоимостью и энергопотреблени- 5 ем, более широкими функциональными возможностями, гибкостью и маневренностью, повышенной надежностью, устойчивостью к воздействию агрессивных сред, ремонтопригодностью, несущей способно- 0 стью, жесткостью, точностью.
Эти преимущества наиболее ярко проявляются в таких областях применения, как:
-манипулирование в труднодоступных зонах, например, подземных выработках,
5 стесненных отсеках судов, высотных металлоконструкций, полуразрушенных конструкциях и сооружениях (после аварий);
-манипулирование на наружных поверхностях объектов - несителей, например.
0 космических или морских кораблей, а также зданий промышленных сооружений;
-разворачивание складных конструкций, например, солнечных батарей или антенн;
5 - манипулирование тяжелыми объектами, например, космическими модулями, элементами промышленных и строительных сооружений.
Формула изобретения
0 1. Манипуляционная система, содержащая основной манипулятор со звеньями и соединяющими их кинематическими парами и приводы, включающие двигатель и редуктор с выходным звеном, отличающа5 я с я тем, что, с целью уменьшения массы, габаритов, энергопотребления, она снабжена по меньшей мере, одним мобильным блоком, имеющим возможность перемещения по звеньям манипулятора, поочередного
0 взаимодействия с его кинематическими парами и приведения их в движение, причем кинематические пары оснащены управляемыми тормозами.
5 ролики, имеющие возможность перемещения по дополнительно введенным направляющим, установленным на звеньях - манипулятора, причем все или часть роликов схвата соединены с приводом, а сам схват связан с приводным узлом мобильного блока посредством вновь введенного дополнительного манипулятора.
г.гггвд
I. FSU I . „ /
Фиг. 2
менного взаимодействия с различными элементами кинематической пары манипулятора.
тем, что1 мобильный блок снабжен средствами измерения положения смежных звеньев манипулятора относительно корпуса приводного узла этого блока и его выходного звенз. 1.0. Система по пп. 1 - 9, о т л и ч а ю щ ая с я тем, что мобильный блок снабжен допод - нительиым приводным устройством, выходное звено которого имеет возможности взаимодействия с выходными звеньями уп равляемых тормозов кинематических пар.
входными звеньями управляемых тормозов кинематических пар и с самими кинематическими парами.
1S 5 Ъь
ггвд
;/
12
а
fc
iJT
зо
с
2/
я #Фиг.З
59
Фиг 6
8
2
Фиг, 5
/
Y СК
юг
115
Фиг.Ю
w
1 ty 7
teZZtZ ZZ
i
V//77A
/s V
iw
/V V
% z
% у
л
i
т
Фш/f.
ЈЈЈ
т
iw
i
ФигМ
1 i.n m
Фиг. %
125
ш /L хш
ж ш , ш rebux s ш
.Ј9 IS
s яъ
|С Ижгот
Ч Г ГГ г
ъгчх V
сЫБ НЫр
i п I I d
C-,-
ib asgjr
Л
C±l C
/л
13 to
dto 75
