2/ 12
(Л
4
О
со
пения. Подпружиненный поршень 18 при подаче сжатого воздуха в пневмоцилиндр 17 перемещает кронштейны с роликами 27. Последние нажимают на толкатели 31, выполненные на ведуп 1,ем диске 16, и включают муфту при неподвижном за счет упоров относительно маховика 12 дополнительном диске 28. При выполнении рабочего хода упоры освобождают дополнительный диск 28, опираюнщйся на маховик 12. При достижении определенного рабочего усилия на ползуне 3 под действием момента в муфте дополнительный диск 28, в пазах которого расположены толкатели 31, поворачивается относительно маховика 12, поршня 18 и кронштейнов с роликами 27.
При повороте ролики 27 перекатываются с толкателей 3 на дополнительный диск 28, опирающийся на подипшник маховика. Муфта отключается, а дальнейшее деформирование поковки осуществляется энергией, запасенной к этому моменту винтом и связанными с ним деталями. 9 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИНТОВОЙ ПРЕСС С МУФТОВЫМ ПРИВОДОМ | 2005 |
|
RU2312768C2 |
| Винтовой пресс | 1990 |
|
SU1750955A1 |
| Винтовой пресс | 1986 |
|
SU1348216A1 |
| Винтовой пресс | 1983 |
|
SU1172745A1 |
| Винтовой пресс | 1989 |
|
SU1646892A1 |
| Винтовой пресс | 1985 |
|
SU1263539A1 |
| Винтовой пресс | 1989 |
|
SU1662868A1 |
| Винтовой пресс | 1988 |
|
SU1523394A1 |
| Винтовой пресс | 1983 |
|
SU1177173A1 |
| Винтовой пресс | 1988 |
|
SU1539076A1 |

Изобретение относится к машиностроению, а именно к конструкциям прессов. Цель изобретения - повышение надежности. Винтовой пресс содержит расположенный в направляющих 2 станины 1 ползун 3 с закрепленной в нем гайкой 4. Винт 5, сочлененный с гайкой 4, размещен в станине в подпятнике 6 и подшипнике 7. На подшипниках 11 установлен приводной маховик 12 с фрикционной муфтой включения. Подпружиненный поршень 18 при подаче сжатого воздуха в пневмоцилиндр 17 перемещает кронштейны с роликами 27. Последние нажимают на толкатели 31, выполненные на ведущем диске 16, и включают муфту при неподвижном за счет упоров относительно маховика 12 дополнительном диске 28. При выполнении рабочего хода упоры освобождают дополнительный диск 28, опирающийся на маховик 12. При достижении определенного рабочего усилия на ползуне 3 под действием момента в муфте дополнительный диск 28, в пазах которого расположены толкатели 31, поворачивается относительно маховика 12, поршня 18 и кронштейнов с роликами 27. При повороте ролики 27 перекатываются с толкателей 31 на дополнительный диск 28, опирающийся на подшипник маховика. Муфта отключается, а дальнейшее деформирование поковки осуществляется энергией, запасенной к этому моменту винтом и связанными с ним деталями. 9 и.п.
Изобретение откос; гея к машиностроению, а и.менно к конструкцкяг, ii)eccoB,
Целью изобретения является повышение надежности.
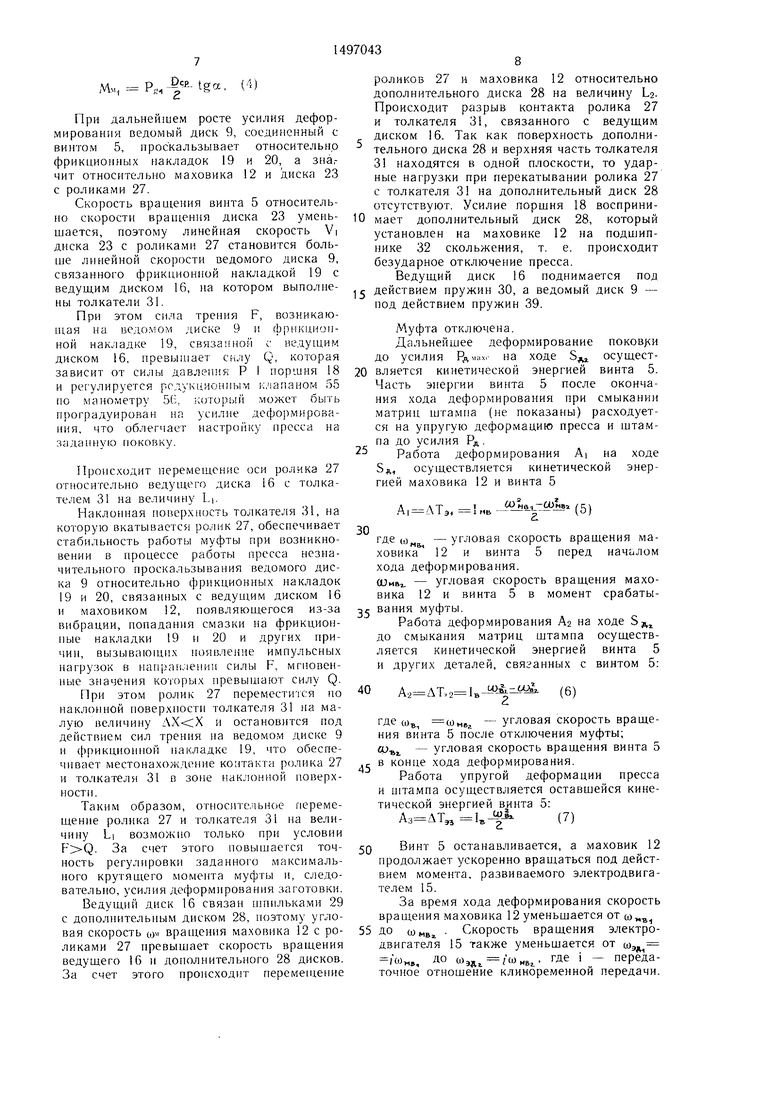
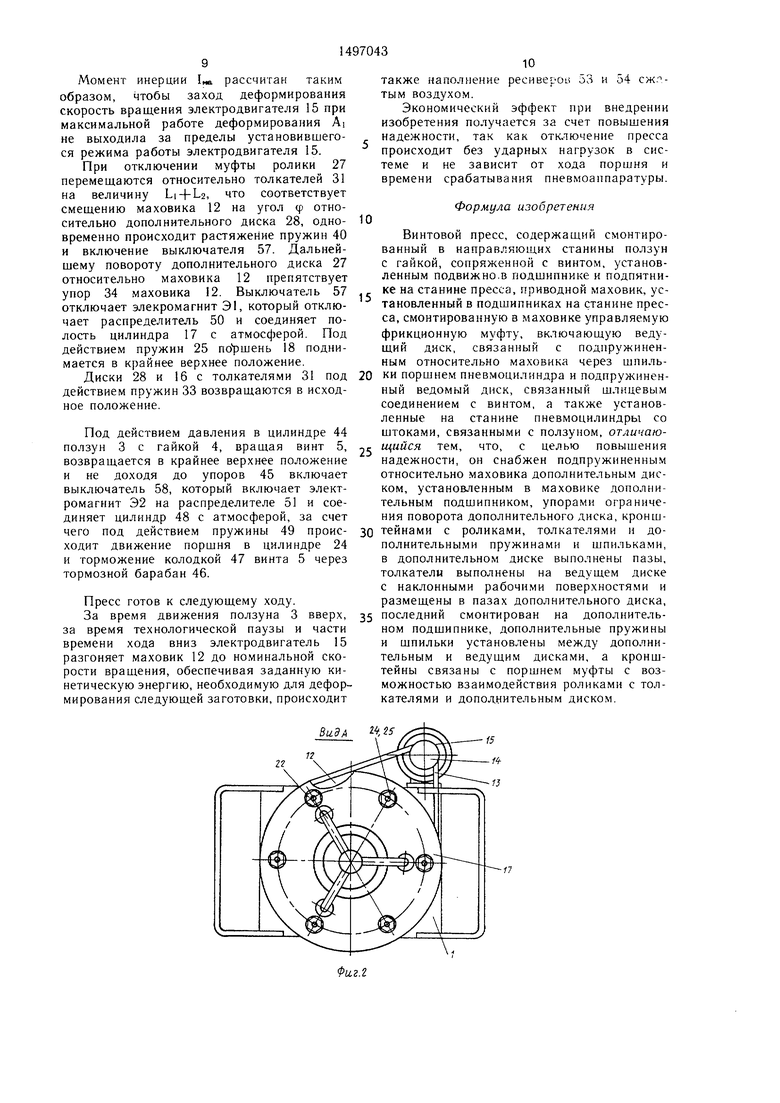
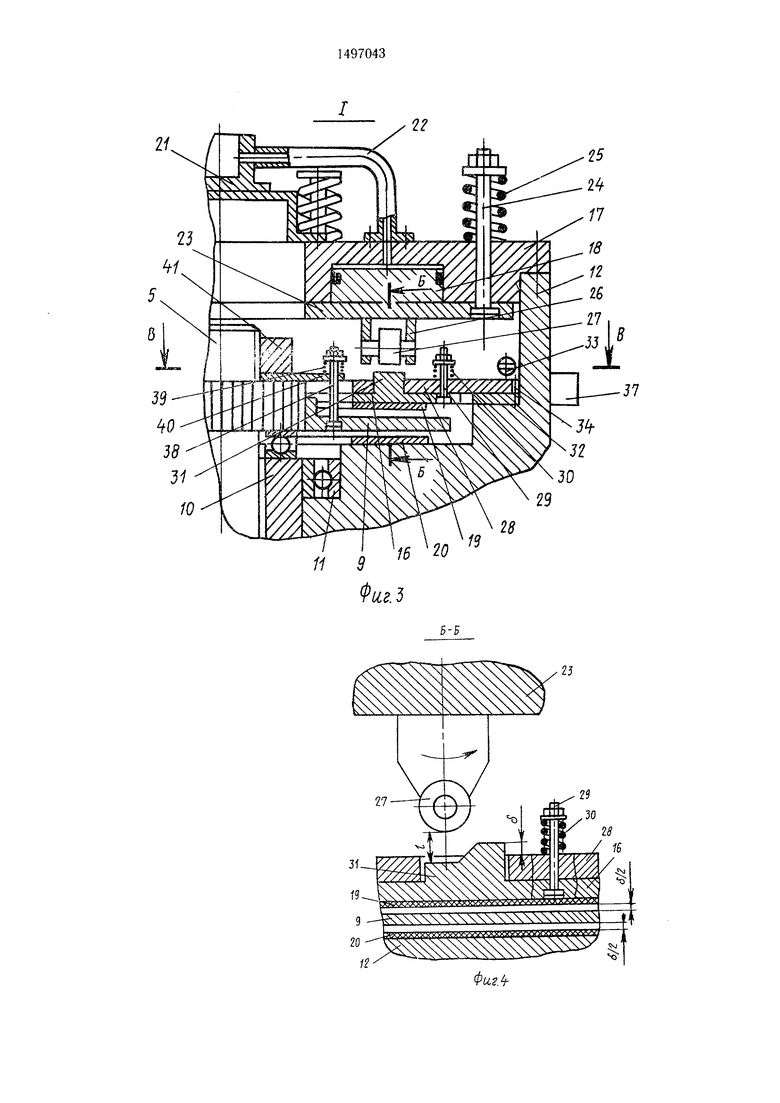
На фиг. 1 изображен пресс с частичными разрезами; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - узел I на фиг. 1; на фиг. 4 - разрез Б-Б на фиг. 3, при отключенной муфте; на фиг. 5 -- то же, при включенной муфте; на ф|иг. 6 - разрез Fi--В на фиг. 3, в момент включения му()ты; на фиг. 7 - тоже, в момент отключения муфты; на фиг. 8 - пневмо- схема пресса; на фиг. 9 - графики распределения работ при деформировании за1 отовки.
Винтовой пресс содержит станину 1, в направляющих 2 которой установлен пол- зун 3, в которо.м ус1ановлена гайка 4, сопряженная с виктом 5. Последний установлен подвижно в опорах станины 1, сос- ТОЯП1ИХ из подпятника б и подшипника 7. Верхняя часть винта 5 соединена шлицевой втулкой 8 с ведомым диском 9 муфты сцепления. На опоре 10, установленной на станине 1 пресса, на подшипниках 11 установлен маховик 12, который через кли- ноременную передачу 13 и шкив 14 соединен с электродвигателем 15. Муфта спаб- жена ведун1им диском 16. Управление муфтой осуществляется от пиевмоцилиндра 17 поршнем 18. На ведун1ем диске 16 и маховике 12 закреплены фрикционные накладки 19 и 20.
Подвод и отвод в пневмоцилиндр 17 осуществляется через подводян1ую втулку 21 и трубопроводы 22. Для подъема поршня 18 нредусмотрен диск 23, соединенный с пневмоцилиндром 18 при помоп и ишилек 24 и пружин 25. На диске 23 закреплены кроь штейны 26 с роликами 27, установлен- ны.ми с возможностью вращения. Ведущий диск 16 соединен с дополнительным диском 28 при помощи дополнительных шпилек 29 и пружин 30, за счет которых осуществ;1яется подъем ведущего диска 16 и его вращение совместно с дополнительным диском 28. На ведупхем диске 16 выполнены толкатели 31. Дополнительный диск 28 установлен на подшипнике скольжения 32 в виде бронзовой прокладки на маховике 12 и подпружинен пружинами 33, которые прижимают дополнительный диск 28 к упорам 34 маховика 12.
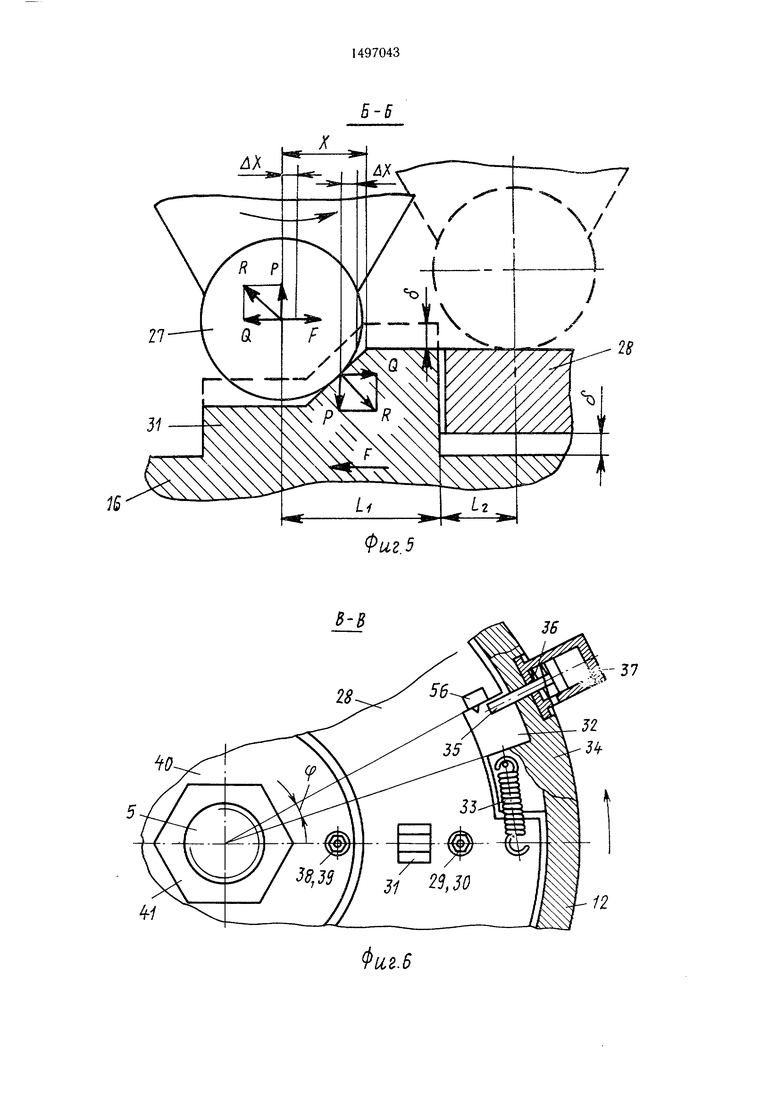
Для ограничения поворота дополнительного диска 28 и связанного с ним веду- uiero диска 16 в момент включения муфты предусмотрены приводные упоры 35, подпружиненные пружинами 36, с цилиндрами 37, установленными на маховике 12.
Для подъема ведомого диска 9 предусмотрены шпильки 38 с пружинами 39, которые крепятся на диске 40, закрепленном гайкой 41 на винте 5.
На ползуне 3 установлены кронштейны 42, связанные со штоками 43 пневмоци- линдров 44, закрепленных на станине 1 пресса. Для ограничения крайнего верхнего положения ползуна 3 на станине 1 пресса установлены упоры 45.
На винте 5 закреплен тормозной барабан 46. В корпусе опоры 10 смонтирован тормоз в виде колодок 47, связанных с цилиндрами 48, которые снабжены пружинами 49.
Управление прессом осуществляется пневматической системой, состоящей из двухпозиционных пневмораспределителей 50, 51 и 52 с электромагнитами Э, Э2 и ЭЗ, ресиверов 53 и 54, редукционного клапана 55 и манометра 56.
Для подачи команды на отключение пневмоаппаратов предусмотрены электрические выключатели 57 и 58.
Пресс работает следующим образом.
Сжатый воздух поступает из пневмосе- ти в ресиверы 53 и 54 и далее в пнев- мосистему. При помощи манометра 56 контролируется давление сжатого воздуха и при необходимости регулируется редукционным клапаном 55. Под действием давления в цилиндре 48 колодки 47 отходят от тормозного барабана 46 и винт 5 растормаживается. Под действием давления в циния относительно то,.кат1-.сй 31. Этому препятствуют наклонные поверхности на толкателях 31 и приводные упоры 35. В результате взаимодействия роликов 27 и толкателей 31 на ось ролика 27 действует сила реакции опоры R, горизонтальная составляющая которой Q препятствует перемещению ролика 27 относительно толкателей 31, а сила давления поршня 18 Р передается через ведущий 6 и ведомый 9 линдре 44 ползун 3 перемещается в край- 10 диски на фрикционные накладки 19 и 20. нее верхнее положение и не доходя доСилы трения, возникающие между ведоупоров 45 взаимодействует с конечныммым диском 9 и фрикционными накладвыключателем 58, который включает электромагнит 32 и переключает распределитель 51. Под действием пружины 49 ци- пятствуют повороту ведомого диска 9 от- линдра 48 колодки 47 нажимают на тор-носительно маховика 12, поэтому винту 5
мозной барабан 46 и винт 5 затормаживается. Цилиндр 17 соединен с атмосферой и порщень 18 находится в крайнем верхнем положении под действием пружин 25.
Цилиндр 37 соединен с атмосферой и 20 приводные упоры 35 под действием пружин 36 находятся в положении, в котором невозможен их контакт с дополнительным диском 28.
Включается электродвигатель 15, который через шкив 14 и клиноременную передачу 13 разгоняет маховик 12 до заданной
ка.ми 19 и 20, жестко связанными с ведущим диском 16 и маховиком 12, препередается крутящий момент от маховика 12.
Муфта включена.
Под действием крутящего момента винт 5 разгоняется до скорости вращения маховика 12 и, свинчивая гайку 4, опускает ползун 3. Винт 5 и маховик 12 вращаются как одно целое с кинетической энергией
25
т I Ь0м
I JM 1«Н„
(2)
угловой скорости ш. Маховик 12 запасает кинетическую энергию
где 1м1, 1м -|- IB - суммарный момент инерции маховика 12, винта 5 и других деталей, связанных с маховиком 12 и винтом 5. После включения муфты подается коман- 30 да на электромагнит ЭЗ, распределитель 52 соединяет полость цилиндра 37 с атмосферой и приводные упоры 35 под действием пружин 36 освобождают дополнительный диск 28.
т I ШЙ
1-JM 1м--,
(1)
где 1м - момент инерции маховика 12.
Для включения муфты подается команда на отключение электромагнита Э2 и включение электромагнитов Э1 и ЭЗ, колодка 47
где 1м1, 1м -|- IB - суммарный момент инерции маховика 12, винта 5 и других деталей, связанных с маховиком 12 и винтом 5. После включения муфты подается коман- 30 да на электромагнит ЭЗ, распределитель 52 соединяет полость цилиндра 37 с атмосферой и приводные упоры 35 под действием пружин 36 освобождают дополнительный диск 28.
Перемещение вниз ползуна 3 продол- под действием давления в цилиндре 48 35 жается до встречи рабочего инструмента отходит от тормозного барабана 46, винт 5с заготовкой (не показаны). После встрерастормаживается; давление поступает через распределитель 52 в полость цилиндра 37, приводные упоры 35 выходят из корпуса маховика 12 с возможностью взаимодейст40
45
ВИЯ с дополнительным диском 28.
Через распределитель 50 в полость цилиндра 17 поступает давление и поршень 18 совершает движение вниз. Под действием поршня 18 движение вниз совершает диск 23 с закрепленными на нем кронштейнами 26 и роликами 27. После совершения хода I (фиг. 4) ролики 27 нажимают на толкатели 31, которые жестко связаны с ведущим диском 16, Ведущий диск 16 опускается на величину 6 и входит в контакт с ведомым диском 9 и маховиком 12 50 мости через фрикционные накладки 19 и 20, одновременно сжимая пружины 30 через шпильки 29.
В момент срабатывания муфты линейная скорость Vi фрикционной накладки 19 равна линейной скорости маховика 12, а скорость Vg ведомого диска 9 равна нулю.
Из-за разности скоростей ролики 27 стремятся переместиться в направлении вращечи рабочего инструмента с заготовкой осуществляется ход деформирования заготовки f, , работа деформирования AI производится и за счет накопленной кинетической энергии маховика 12 и за счет кинетической энергии винта 5.
Электродвигатель 15 на рабочем ходе не отключается и продолжает передавать энергию маховику 12.
Во время рабочего хода усилие деформирования увеличивается крутящий момент, передаваемый муфтой. Величина крутящего момента, передаваемого муфтой без учета трения в винтовом механизме, подпятнике 6 и подшипнике 7 определяется по зависиМи
- D De.
Р« - tga.
(3)
55
где Pg - усилие деформирования;
Dop-средний диаметр резьбы винта 5;
а -угол наклона резьбы винта 5. При достижении усилия ,,., на ходе 5м.,момент в винтовом механизме достигает момента настройки муфты:
мым диском 9 и фрикционными накладпятствуют повороту ведомого диска 9 от- носительно маховика 12, поэтому винту 5
ка.ми 19 и 20, жестко связанными с ведущим диском 16 и маховиком 12, пре пятствуют повороту ведомого диска 9 от- носительно маховика 12, поэтому винту 5
передается крутящий момент от маховика 12.
Муфта включена.
Под действием крутящего момента винт 5 разгоняется до скорости вращения маховика 12 и, свинчивая гайку 4, опускает ползун 3. Винт 5 и маховик 12 вращаются как одно целое с кинетической энергией
т I Ь0м
I JM 1«Н„
(2)
где 1м1, 1м -|- IB - суммарный момент инерции маховика 12, винта 5 и других деталей, связанных с маховиком 12 и винтом 5. После включения муфты подается коман- да на электромагнит ЭЗ, распределитель 52 соединяет полость цилиндра 37 с атмосферой и приводные упоры 35 под действием пружин 36 освобождают дополнительный диск 28.
мости
чи рабочего инструмента с заготовкой осуществляется ход деформирования заготовки f, , работа деформирования AI производится и за счет накопленной кинетической энергии маховика 12 и за счет кинетической энергии винта 5.
Электродвигатель 15 на рабочем ходе не отключается и продолжает передавать энергию маховику 12.
Во время рабочего хода усилие деформирования увеличивается крутящий момент, передаваемый муфтой. Величина крутящего момента, передаваемого муфтой без учета трения в винтовом механизме, подпятнике 6 и подшипнике 7 определяется по зависиМи
- D De.
Р« - tga.
(3)
где Pg - усилие деформирования;
Dop-средний диаметр резьбы винта 5;
а -угол наклона резьбы винта 5. При достижении усилия ,,., на ходе 5м.,момент в винтовом механизме достигает момента настройки муфты:
Мм, P«,, (4)
При дальнейшем росте усилия деформирования ведомый диск 9, соединенный с ви)1том 5, проскальзывает относительно фрикционных накладок 19 и 20, а зна,- чит относительно маховика 12 и диска 23 с роликами 27.
Скорость вращения винта 5 относительно скорости вращения диска 23 уменьшается, ноэтому линейная скорость Vi диска 23 с роликами 27 становится боль- 1не линейной скорости ведомого диска 9, связанного фрикционной накладкой 19 с ведущим диском 16, на котором выполнены толкатели 31.
При этом сила трения F, возникаю- Н1ая на ведомом диске 9 и фрикционной накладке 19, связанной с ведущим диском 16, превышает силу Q, которая зависит от силы давления Р I поршня 18 и регулируется редукционным клапаном 55 но манометру 5G, ;;оторый может быть проградуирован на усилие деформ рова- облегчает
ния, что заданную поковку.
настройку пресса на
Происходит перемещение оси ролика 27 относительно ведун его диска 16 с толкателем 31 на величину L|.
Наклонная поверхность толкателя 31, на которую вкатывается ролик 27, обеспечивает стабильность работы муфты при возникновении в процессе работы пресса незначительного проскальзывания ведомого диска 9 относительно фрикционных накладок 19 и 20, связанных с ведущим диском 16 и маховиком 12, появляющегося из-за вибрации, попадания смазки на фрикционные накладки 19 и 20 и других причин, вызываю1цих ноявление импульсных нагрузок в напр-анлении силы F, мгновенные значения которых превышают силу Q.
При этом ролик 27 переместится но наклонной новерхности толкателя 31 на малую величину и остановится под действием сил трения на ведомом диске 9 и фрикциощюй накладке 19, что обеспечивает местонахождение контакта ролика 27 и толкателя 31 в зоне наклонной поверх- ностн.
Таким образом, относите.пьное перемещение ролика 27 и толкателя 31 на величину LI возможно только при условии . За счет этого новышается точность регулировки заданного максимального крутящего момента муфты и, следовательно, усилия деформирования заготовки.
Ведущий диск 16 связан П1ннлька. ии 29 с дополнительным диском 28, поэтому угловая скорость соч вращения маховика 12 с роликами 27 превышает скорость вращения ведущего 16 н дополнительного 28 дисков. За счет этого прО11Сходит переме цение
роликов 27 и маховика 12 относительно дополнительного диска 28 на величину La. Происходит разрыв контакта ролика 27 и толкателя 31, связанного с ведущим диском 16. Так как поверхность дополнительного диска 28 и верхняя часть толкателя 31 находятся в одной плоскости, то ударные нагрузки при перекатывании ролика 27 с толкателя 31 на дополнительный диск 28 отсутствуют. Усилие порщня 18 воспринимает дополнительный диск 28, который установлен на маховике 12 на подшипнике 32 скольжения, т. е. происходит безударное отключение пресса.
Ведущий диск 16 поднимается под
действием пружин 30, а ведомый диск 9 - под действием пружин 39.
Муфта отключена.
Дальнейшее деформирование поков)и до усилия Рдмахг на ходе Sf осуществляется кинетической энергией винта 5. Часть энергии винта 5 после окончания хода деформирования при смыкании матриц штампа (не показаны) расходуется на упругую деформацию пресса и штампа до усилия Рд.
Работа деформирования AI на ходе SA, осуществляется кинетической энергией маховика 12 и винта 5
А, ДТ,
160„в1-60мв1
1 МЬЪ
(5)
5
0
где ы.
маходе Ьд. осуществ- винта 5 винтом 5:
-угловая скорость вращения ховика 12 и винта 5 перед началом хода деформирования.
OjMBj. - угловая скорость вращения маховика 12 и винта 5 в момент срабатывания муфты.
Работа деформирования А2 на до смыкания .матриц щтампа ляется кинетической энергией и других деталей, свя: анных с
0 А,лТ. (6)
где ш со„ег - угловая скорость вращения ви нта 5 после отключения муфты; 4}- - угловая скорость вращения винта 5 п в конце хода деформирования.
Работа упругой деформации пресса и щтампа осуществляется оставшейся кинетической энергией винта 5:
,, 1,(7)
50
55
Винт 5 останавливается, а маховик 12 продолжает ускоренно врандаться под действием момента, развиваемого электродвигателем 15.
За время хода деформирования скорость вращения маховика 12 уменьшается от со,, ДО о)мв1 Скорость вращения электродвигателя 15 также уменьшается от а)э / ы„,, ДО а)) где i - передаточное отношение клиноременной передачи.
также наполнение ресиверов оЗ и 54 сжя,- тым воздухом.
Экономический эффект при внедрении изобретения получается за счет повышения надежности, так как отключение пресса происходит без ударных нагрузок в системе и не зависит от хода поршня и времени срабатывания пневмоаппаратуры.
Формула изобретения
Винтовой пресс, содержащий смонтированный в направляющих станины ползун с гайкой, сопряженной с винтом, установленным подвижно.в подшипнике и подпятниМомент инерции 1„в рассчитан таким образом, чтобы заход деформирования скорость вращения электродвигателя 15 при максимальной работе деформирования AI не выходила за пределы установившегося режима работы электродвигателя 15.
При отключении муфты ролики 27 перемещаются относительно толкателей 31 на величину Li4-L2, что соответствует смещению маховика 12 на угол ф относительно дополнительного диска 28, одно- Ю временно происходит растяжение пружин 40 и включение выключателя 57. Дальнейшему повороту дополнительного диска 27 относительно маховика 12 препятствует упор 34 маховика 12. Выключатель 57 .с ке на станине пресса, приводной маховик, ус- отключает элекромагнит Э1, который отклю-тановленный в подшипниках на станине пресчает распределитель 50 и соединяет по-са, смонтированную в маховике управляемую
лость цилиндра 17 с атмосферой. Под фрикционную муфту, включающую веду- действием пружин 25 по ршень 18 подии-щий диск, связанный с подпружиненмается в крайнее верхнее положение.ным относительно маховика через шпильДиски 28 и 16 с толкателями 31 под 20 ки поршнем пневмоцилиндра и подпружинен- действием пружин 33 возвращаются в исход- ный ведомый диск, связанный шлицевым ное положение.соединением с винтом, а также установленные на станине пневмоцилиндры со
Под действием давления в цилиндре 44 штоками, связанными с ползуном, отличаю- ползу 3 с гайкой 4, вращая винт 5, 25 тем, что, с целью повышения возвращается в крайнее верхнее положение надежности, он снабжен подпружиненным и не доходя до упоров 45 включает относительно маховика дополнительным дис- выключатель 58, который включает элект- ком, установленным в маховике дополни- ромагнит Э2 на распределителе 51 и сое- тельным подшипником, упорами ограниче- диняет цилиндр 48 с атмосферой, за счет ния поворота дополнительного диска, кронш- чего под действием пружины 49 проис- ЗО теинами с роликами, толкателями и доходит движение порщня в цилиндре 24 полнительными пружинами и шпильками.
и торможение колодкой 47 винта 5 через тормозной барабан 46.
Пресс готов к следующему ходу.
в дополнительном диске выполнены пазы, толкатели выполнены на ведущем диске с наклонными рабочими поверхностями и размещены в пазах дополнительного диска. За время движения ползуна 3 вверх, 35 последний смонтирован на дополнительза время технологической паузы и части времени хода вниз электродвигатель 15 разгоняет маховик 12 до номинальной скорости вращения, обеспечивая заданную кинетическую энергию, необходимую для деформирования следующей заготовки, происходит
ВиЭА
также наполнение ресиверов оЗ и 54 сжя,- тым воздухом.
Экономический эффект при внедрении изобретения получается за счет повышения надежности, так как отключение пресса происходит без ударных нагрузок в системе и не зависит от хода поршня и времени срабатывания пневмоаппаратуры.
ке на станине пресса, приводной маховик, ус- тановленный в подшипниках на станине пресФормула изобретения
Винтовой пресс, содержащий смонтированный в направляющих станины ползун с гайкой, сопряженной с винтом, установленным подвижно.в подшипнике и подпятнике на станине пресса, приводной маховик, ус- тановленный в подшипниках на станине пресном подшипнике, дополнительные пружины и шпильки установлены между дополнительным и ведущим дисками, а кронштейны связаны с поршнем муфты с возможностью взаимодействия роликами с толкателями и дополнительным диском.
2f
20
16 20
19
28
Фиг. 5
25
АХ
0
i
Фиг 5
-37
12
Фиг.6
Составитель В. Гринберг
Ремктор Н. ГорватТехред И. ВересКорректор Т. Малец
Заказ 4385/20Тираж 528 Ниииснос
ВНИИПИ Госуаарственного комитета по изобретениям и открытиям при ГКНГ СССР
i 13035, Москва, , Раушская иаб., д. 4/о Произвочствеиио-издате.чьский комбинат «Патент, г. жгород, ул. Гагарина, 101
57
АЗ
Сриг.9
| Винтовой пресс | 1983 |
|
SU1177173A1 |
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
