11
Изобретение относятся к машиностроению, а именно к конструкции винтовых прессов.
Цель изобретения - повышение КПД пресса а счет снижения расхода сжатого воздуха.
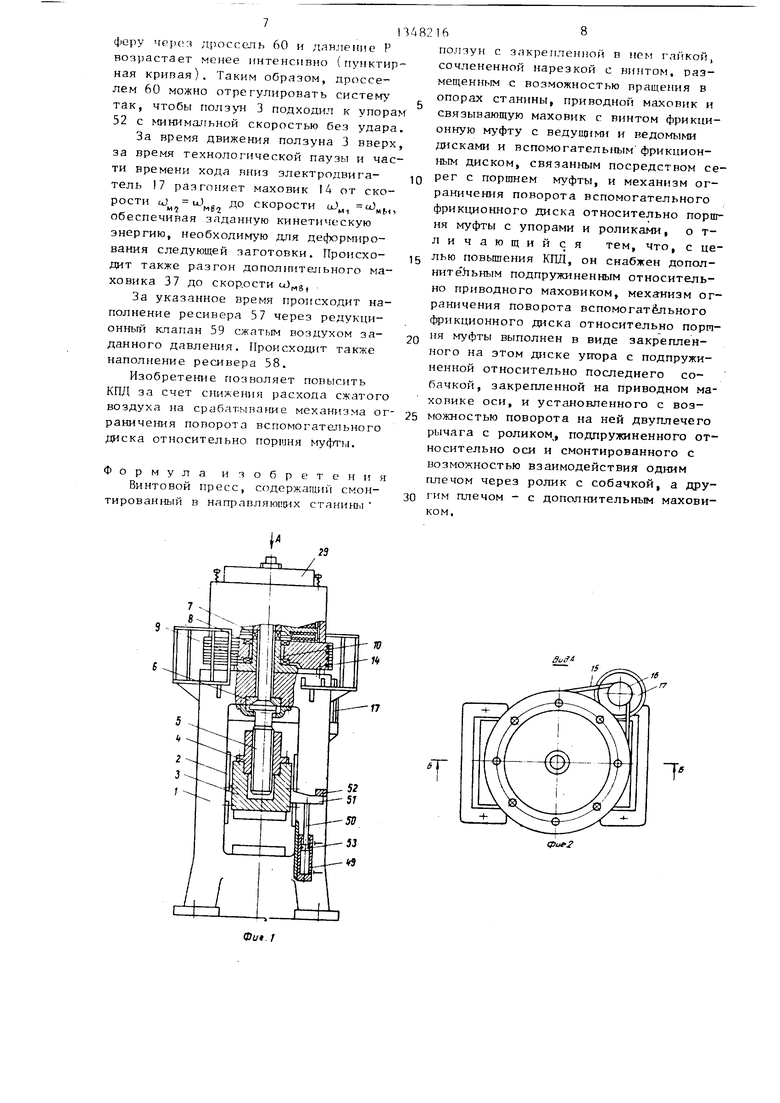
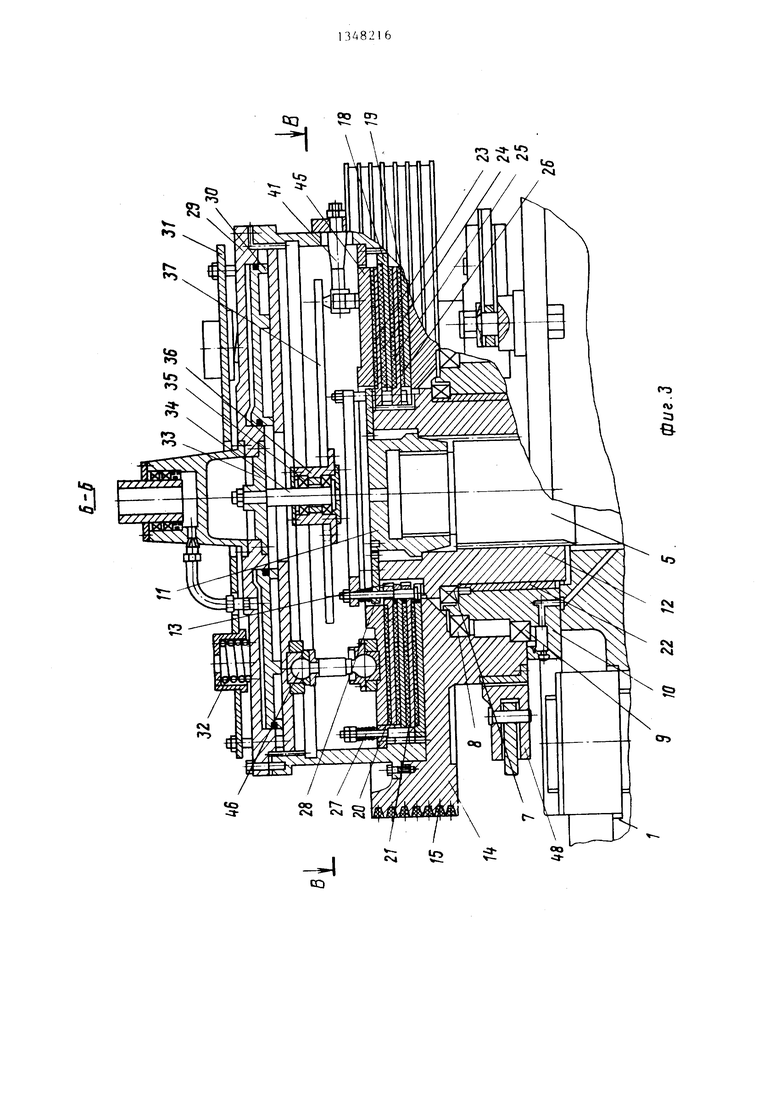
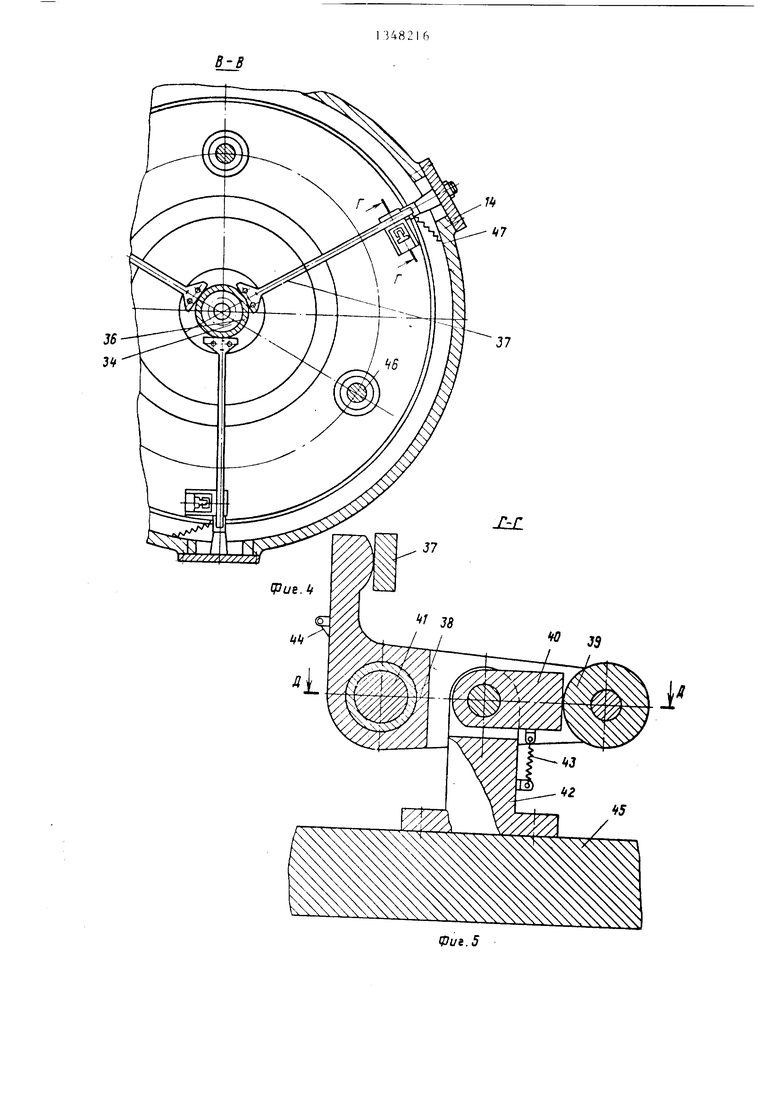
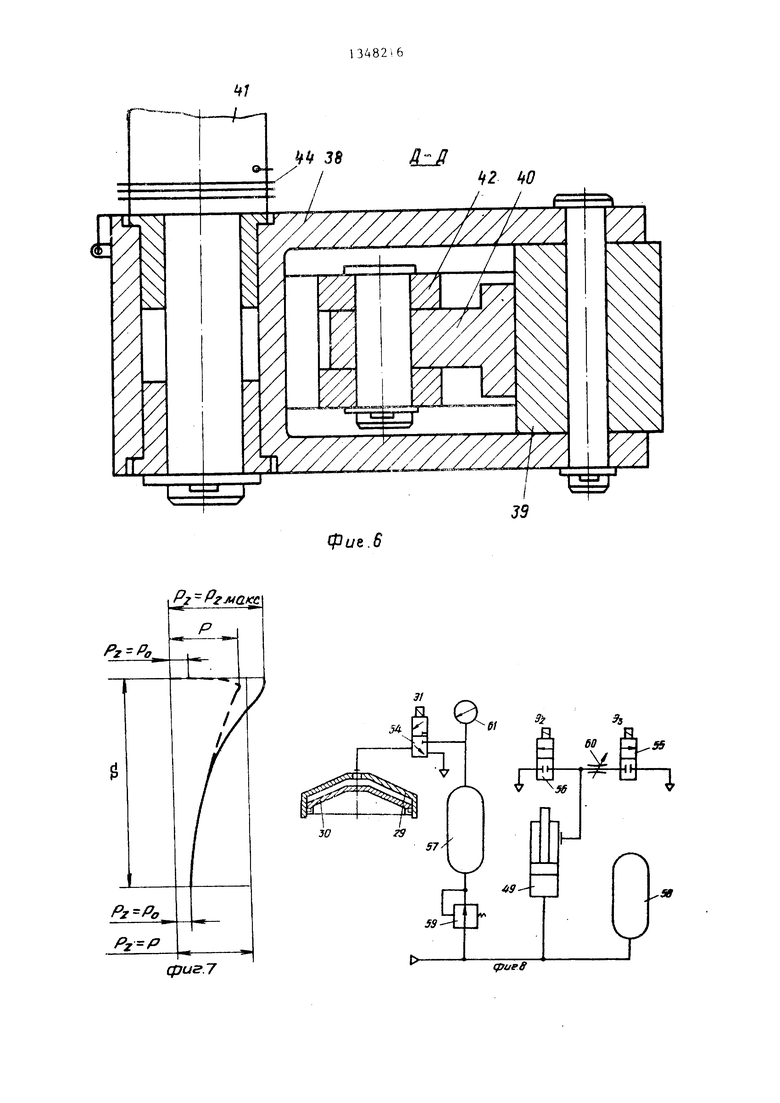
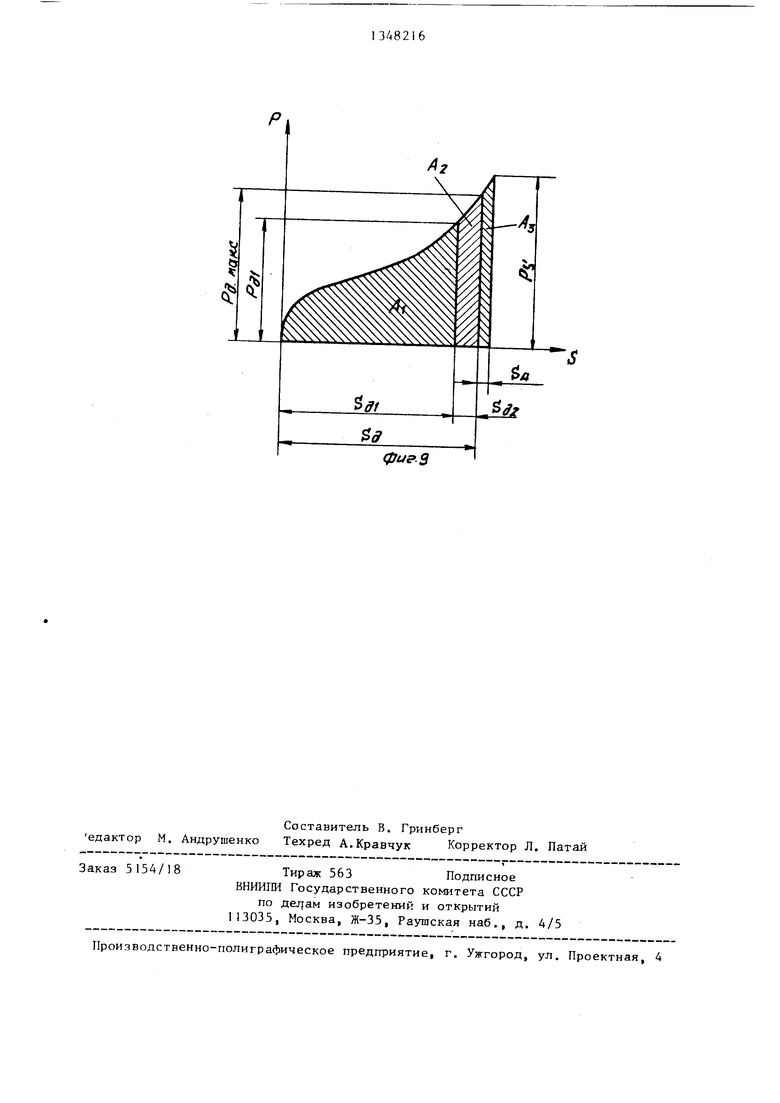
На фиг. 1 изображен предлагаемый пресс с частичными разрезами; на фиг. 2 - вид по стрелке А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - разрез В-В на фиг. 3; на фиг. 5 разрез Г-Г на Фиг. А; на фиг. 6 - разрез Д-Д на фиг. 5; на фиг. 7 - графики изменения давле- ния в верхних полостях возвратных цилиндров; на фиг. 8 - пневматическая схема управления цилиндром ryфты и возвратными цилиндрами; на фиг. 9- графики распределения работ при де- формировании заготовки.
Винтовой пресс содержит CTaifflHy 1 в направляющих 2 которой установлен ползу { 3 с гайкой 4, сопряженной с винтом 5. Винт 5 установлен подвижно в 11одг1ятш1ке 6 и подшипниках 7, 8 и 9 на корпусе 10, который жестко связан со станиной 1. На винте 5 с помощью гайки 11 закреплена ступица 12 со шлицами 13. На подшипниках 8 и 9 ус- тановлен ь аховик 14, который клиноре- менной передачей 15 связан со шкивом 16 г лектродвигателя 17, установленного на станине 1. На маховике 14 уста- нов.пена управляемая фрикционная муф- та, состояп .ая из ведунщх фрикционных да1сков 18 и 19, связанных шлицевым соединением с маховиком 14, и ведомы фрикционных дисков 20 и 21, связанных 1Ш1ицевым соединением со ступицей 12, установленной подвижно посредством подшипника 7 и втулки 22 в корпусе 10. На дисках 20 и 21 закреплены фрикпионные нак-ттадки 23-26. Диск 18 связан с подпружиненными толкателями 27, а диски 20 и 21 - с подпружиненными толкателями 28 таким образом, чтобы при отключенной муфте фрикционные накладки 23 - 26 не соприкасались с дискаьм 18 и 19.
На махов1 ке 14 установ:1ен пневмо- ц шиндр 29, гюр1мен1 30 которого подпружинен через дополш1тельный диск 31 пружинами 32.
На 1П1евмоцилиндре 29 с помощью
(панца 33 закреплена ось 34, на которой в подшип никах 35 крепится корпус 36 с устаноатенным на нем дополнительным маховиком 37. Последний кон162
тактирует с одним гатечом двуплечих рычагов 38, на втором конце которых установлены ролики 39. Они взаимодействуют с собачками 40. Двуплечие рычаги 38 установлены с возможностью поворота на осях 41, закрепленных на приводном маховике 14, а собачки 40 крепятся подвижно на упорах 42. Собачки 40 и двуплечие рычаги 38 подпружинены пружинами 43 и 44 к упорам 42 и к осям 41. Упоры 42 закреплены на вспомогательном фрикционном диске 45. Поршень 30 пневмоцилиндра 29 связан с помощью серег 46 с вспомогательным фрикционным диском 45. Дву- гшечие рычаги- 38 и упоры 42 являются механизмом ограничения поворота вспомогательного фрикционного диска 45 относительно поршня 30 муфты, дополнительный маховик 37 подпружинен пружинами 47 к маховику 14. Маховик 14 связан с колодочным тормозом 48, за- крепле}1ным на станине 1 .
На станине 1 пресса установлены пневмоцилиндры 49 (показан один цилиндр), штоки 50 которых связаны с кронштейнами 51 ползуна 3, верхнее положение которого фиксируется упорами 52, Штоки 50 пневмоцилиндров связаны с поршнями 53.
Унравление прессом осуществляется пневматической системой, состоящей из двухиозиционных пневмораспредели- телей 54, 55 и 56, ресиверов 57 и 58 редукционного клапана 59, дросселя 60 и манометра 61.
Пресс работает следующим образом.
В исходном положении электромагни 31 обесточен.
Пневмораспределитель 54 соединяет пневмоцилиндр 29 муфты с атмосферой. Поршень 30 поджат пружинами 32. Вспомогательный фрикционный диск 45 находится в крайнем верхнем положении, Фрикпионные диски 18-21 не контактируют с фрикционными накладками 23- 26. Муфта отключена.
Электромагнит 32 включен, пневмо- распределитель 56 соединяет штоковые полости пневмоцилиндров 49 с атмосферой, при этом поршневые полости пневмоцилиндров 49 связаны с ресивером 58.
Кронштейны 51 упираются в упоры 52. Включается электродвигатель 17, который через шкив 16 и клиноременную передачу 15 разгоняет маховик 14 до
3
заданной угловой скорости. Маховик 14 запасает кинетическую энергию:
3
т
cJ.
эм
где 1 - момент инерции маховика; uj - угловая скорость вращения
маховика.
Вместе с маховиком 14 разгоняется дополнительный маховик 37, который запасает кинетическую энергию:
мА й 2
где Т
Md
- момент инерции дополнительного маховика.
Для совершения хода разгона подвижных частей включается электромагнит 31. Он переключает пневмораснре- делитель 54, и сжатый воздух из ресивера 57 поступает в пиевмогщлиндр 29 муфты. Под действием давления воздуха поршень 30 опускается и через серьги 46 опускает вспомогательный фрикционьгый диск 45. Под действием диска 45 опускаются диски 18, 20 и 21. При этом диски 20 и 21, связанные с винтом 5, входят в контакт с маховиком 14 через фрикционные накладки 23 - 26 и диски 18 и 19,
В момент срабатывания муфты линейная скорость V вспомогательного Г фрикционного диска 45 равна линейной скорости маховика 14, а скорость V фрикционной накладки 23 равна 0. Из- за разности скоростей серьги 46 стремятся отклониться От вертикального положения и разомкнуть контакт фрикционной накладки 23 и вспомогательного фрикционного диска 45. Этому , препятствует механизм ограничения поворота фрикционного диска 45 относительно поршня 30. Происходит вьфавни- вание скоростей вращения винта 5 и маховика 14.
Муфта включена. При включенной муфте винт 5 и маховик 14 вращаются как одно целое с кинетической энергией.
сОме
где Т
м
)М6
т
т
-М8
к
суммарный момент инерции маховика, винта и других деталей, связанных с маховиком и винтом. Перемещение вниз ползуна 3 продолжается до встречи инструмента с заготовкой.
48216
При встрече рабочего инструмента с заготовкой (не показаны) осуществляется ход деформирования заготовки. g При этом работа дeфop п poвaния осуществляется за счет накопленной кинетической энергии маховика 14 и винта 5, Электродвигатель 17 на рабочем ходе не отключается и продолжает пере10 давать энергию маховику 14. Во время рабочего хода усилие дефорьп1рования возрастает, увеличивается крутящий момент, передаваемый муфтой. Величина крутящего момента, передаваемого
15 муфтой без учета трения в винтовом механизме, подпятнике 6 и подшипнике 7, определяется по зависимостл
М Р,
tpct,
20
где Р - усилие дефс(р№1рования;
р - средний диаметр резьбы винта 5 t
о. - угол наклона резьбы вин- 25та 5.
При этом скорость вращения маховика 14 и винта 5 начинает снижаться В момент, когда скорость маховика 14 и винта 3 снижается на величину ,, 30 дополнительный маховик 37 сохраняет запас кинетической энергии и продолжает вращаться u l, м Р гзультате этого он начинает взаимодействовать с двуплечими рычагами 2g 38, которые поворачиваются вокруг
осей 41. При дальнейшем снижении скорости вращения маховика 14 и винта двуплечие рычагл 38, отклоняясь, освобождают упоры 42, а следовательно, 40 и вспомогательный фрикционный диск 45
При достижении усилия Р Р на ходе Sj, момент в винтовом механизме достигает момента настройки муфты:
45
- р -З, 2
tr:o(.
При дальней1Г1ем росте усилия деформирования диска 20 и 21 винта 5 проскальзывают относительно фрикционных накладок 23 - 26. Скорость вращения винта 5 относительно скорости вращения маховика 14 уменьшается. Серьги 45 отклоняются от вертикального положения, что обеспечивает перемен(ение вниз поршня 30 до упоров (не показаны, выполненных на маховике 14. После этого диски 18, 20 и 21 под действием толкателей 27 и 28 расходятся , oDc: | .-., ,. с нпГч, диое вращение.
Л;Ш1.., .П1 «1рмиропаиие гюкогжи до усилия , 1 ;с--чцес/гния€ Г(:я кинетической - ч- р iu-H ииита S. Часть энергии иинт/; иис. те (Жоичания хода деформирон 1чм;: р.-м. Х(1дуртся на упругую деформам.ик. м;- :. г, 1 М амг а до усилия
PV
Работа дсф( 1рМ11р ,наиия Л осуществляется киис тичсгкой и срт ией маховика и винта:
л , т - I l-l J Ч ,
,, г,-,и2
е . - скорость )ра1 1ения махоника и винта перед на- хода де({юрмироваиия; 1 - угловая скорость вращения маховика и пинта н момент сраб;)тыиа)1ия . Рабата деформирования А осущест- пнетс:я кинетичг ской тнер1-ией винта;
9
7 Т,,
,7 И
ь
Mf,
2
где ii, - iV ) угловая скорость вра- гдения викта после отключения гуфты; ., угловая скорость пращения
винта н конце хода де(К рми- р о тщании .
Работа упругой деформации пресса и uiTaMiia огуич-ствляется оставшейся кинетической шергие винта 5:
А, лТ.
iUiHT 5 останавливается, а маховик 14 продолжает уCKOJICUHL: вращаться под де11ствием момента, развиваемого ч.|;с ктродвигателем 17. За время хода дeфop г.po:iaни я скорос /гь вращения ма- ховикп уг- снь1 ается от , 0 . ;{О с)(;,, Скорость нратцения электроДвигате-Тя 17 также умг-иьпаетсч от , ДО - iiir,- i f:2 TTi реДаточнос (Л нсниени е клинореме/нной . передачи.
loMeHT инерции т „|i, рассчитан таким образом, что за ход пеформиро- ния cKopccTii иращсния тлектролвигате Г-Я 1 / 1Ц)и м,1ксим;1лbHoi; работе дефор- tIlpoв,;ния Л не. в : :одит за пределы
у станот ивпе гося ре«1ма работы рол.вит атсля 1 7 .
liocjie окончат я хода л,е1 кн1мирова- и пс- -аиовки винта 5 по.тгзун 3 под
5
0
5
0
действием силь давления воздуха в поршневоГ полости цилинд15а 49 начинает ускоренно перемещаться вверх, R :iTOT момент злектромагнит (Э1) обес- точу1вается и пневмораспределитель 54 соединяет цилиндр 29 с атмосферой. Поршень 30 под действием пружин 32 перемещается в крайнее верхнее положение, серьги 46 за1гямают вертикальное положение и затем поднимают вспомогательный фрикдионньв диск 45 вместе с упорами 42 и собачками 40. Последний входит в контакт с роликами 39 двуплечих рычагов 38. Пружины 47, возде1 ствуя на дополнительный маховик 37, возвращают ег-о в исходное положение относительно приводного маховика 1 4.
При движении ползуна 3 вверх под действием силы от пневмоцилиндров 49 винт 5 и ДО1СКИ 20 и 21 начинают вращаться в противоположную относительно вращения маховика 14 сторону. Так как ш.токовые полости пневмодилиндров 49 закрыты, то при подъеме порщней 53 происходит сжатие объема воздуха в штоковых полостях.
Таким образом, при движении ползуна 3 вверх сила сопротивления воздуха в поршневых полостях возрастает. Движение подвижных частей определяется зависимости
35
- Г, 1 - G - Г F
где Р н Р - давление воздуха в
поршневых и штоковых полостях пневмоцилинд- ров;
и f - суммарные порш)1евая и штоковая площади поршней 53 пневмоцилиндров 49;
; - вес 3 и гайки 4;
f li - сумма приведенных сопротивлений (в направляющих ползуна, в винтовом механизме, подпятнике и подитпнике винта).
Изменение давлеш1я в поршневых полостях на ходе : вверх при закрытых поршневых полостях показано сплошной кривой.
При включенном электромаг}тте 33 и открытом пневмораспределителе 55 часть воздуха стравливается в атмос
фору дроссел) 60 и длн:тение Р возрастает ме}{ее интенсивно (пунктирная кривая). Таким образом, дросселем 60 можно отрегулировать систему так, чтобы ползун 3 подходил к упорам 52 с минимальной скоростью без удара
За время движения ползуна 3 вверх за время технологической паузы и части времени хода вниз электродвигатель 17 разгоняет маховик 1ч от скорости ,.j до скорости аЗ„, сО„,, обеспечивая заданную кинетическую энергию, необходимую для деформирования следующей заготовки. Происходит также разгон дополш1ТШ1ьного маховика 37 до скор.ости ,
За указанное время происходит наполнение ресивера 57 через редукционный клапан 59 сжатым воздухом заданного давления. Происходит также наполнение ресивера 58.
Изобретение позволяет повысить КПД за счет снижения расхода сжатого воздуха на срабатывание механизма ог- раничения поворота вспомогательного диска относительно поршня .
Формула изобретения
Винтовой пресс, содержащий смонтированный в напрлвляю1 1 1х станинь
5
5
0
0
ползун с закрепленной в нем гайкой, сочлененной нарезкой с винтом, размещенным с возможностью вращения в опорах станины, приводной маховик и связывающую маховик с винтом фрикционную муфту с ведущими и ведомыми дисками и вспомогателы1ым фрикционным диском, связанным посредством серег с поршнем муфты, и механизм ограничения поворота вспомогательного фрикционного диска относительно поршня муфты с упорами и роликами, о т- личающийся тем, что, с целью повьппения КПД, он снабжен допол- подпружиненным относительно приводного маховиком, механизм ограничения поворота вспомогательного фрикционного диска относительно поршня муфты выполнен в виде закрепленного на этом диске уггора с подпружиненной относительно последнего собачкой, закрепленной на приводном маховике оси, и установленного с возможностью поворота на ней двуплечего рычага с роликом,, подпружиненного относительно оси и смонтированного с возможностью взаимодействия одним плечом через ролик с собачкой, а другим плечом - с дополнительным маховиком.
Ж /
W
Buffll
т
Cpuf
S5
ег
Фиъ.5
фи&.б
Р2 Ргмакс
фиг.7
я
(
| название | год | авторы | номер документа |
|---|---|---|---|
| Винтовой пресс | 1983 |
|
SU1172745A1 |
| Винтовой пресс | 1983 |
|
SU1177173A1 |
| Винтовой пресс | 1988 |
|
SU1539076A1 |
| Винтовой пресс | 1988 |
|
SU1523394A1 |
| Винтовой пресс | 1987 |
|
SU1497043A1 |
| Винтовой пресс | 1985 |
|
SU1263539A1 |
| Винтовой пресс | 1989 |
|
SU1646892A1 |
| Винтовой пресс | 1990 |
|
SU1750955A1 |
| Винтовой пресс | 1989 |
|
SU1662868A1 |
| Винтовой пресс | 1990 |
|
SU1803335A1 |
Изобретезше относится к машиностроению, а именно к конструкции винтовых rfpeccoB. Целью изобретения является повьпиение КПД пресса за счет .снижения расхода сжатого воздуха. Для достижения цели винтовой пресс содержит смонтированный в направляющих станины ползун с закрегшенной на нем 1 айкой, сочлененной нарезкой с винтом, приводной маховик и фрикционную с ведущим и ведомым дисками и вспомогательным фрикционным диском. Последний посредством серег связан с поршнем муфты. Пресс имеет дополнительный маховик, подпружиненный относительно него механизм ограничения поворота вспомогательного диска относительно поршня муфты. Этот механизм выполнен в виде закрепленного на вспомогательном диске упора с подпружиненной относительно последнего собачкой и двуплечего рычага с роликом. Рычаг подпружинен относительно оси, закрепленной на приводном маховике, и поворачивается на ней при воздействии на один его конец дополнительного маховика, освобождая другим концом с роликом упор, в результате дополнительный диск муфты поворачивается относительно поршня и маховик отключается от винта. 9 ил. § (Л со 00 N9
Составитель В. Гринберг едактор М. Андрушенко Техред А.КравчукКорректор Л. Патай
Заказ 5154/18
Тираж 563Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Винтовой пресс | 1983 |
|
SU1172745A1 |
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
