Ч
ч1
00
Изобретение относится к машиностроению, а именно к конструкции прессов.
Цель изобретения - повышенно КПД пресса за счет снижения работы трения при проскальзывании дисков муфты.
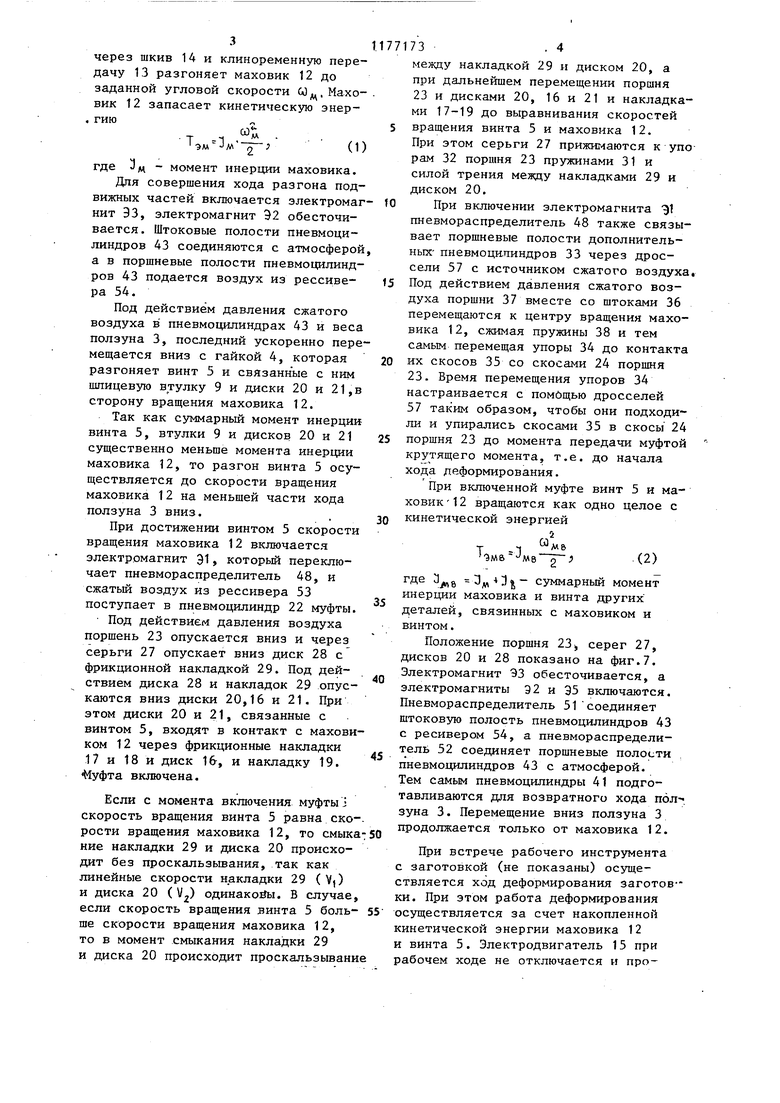
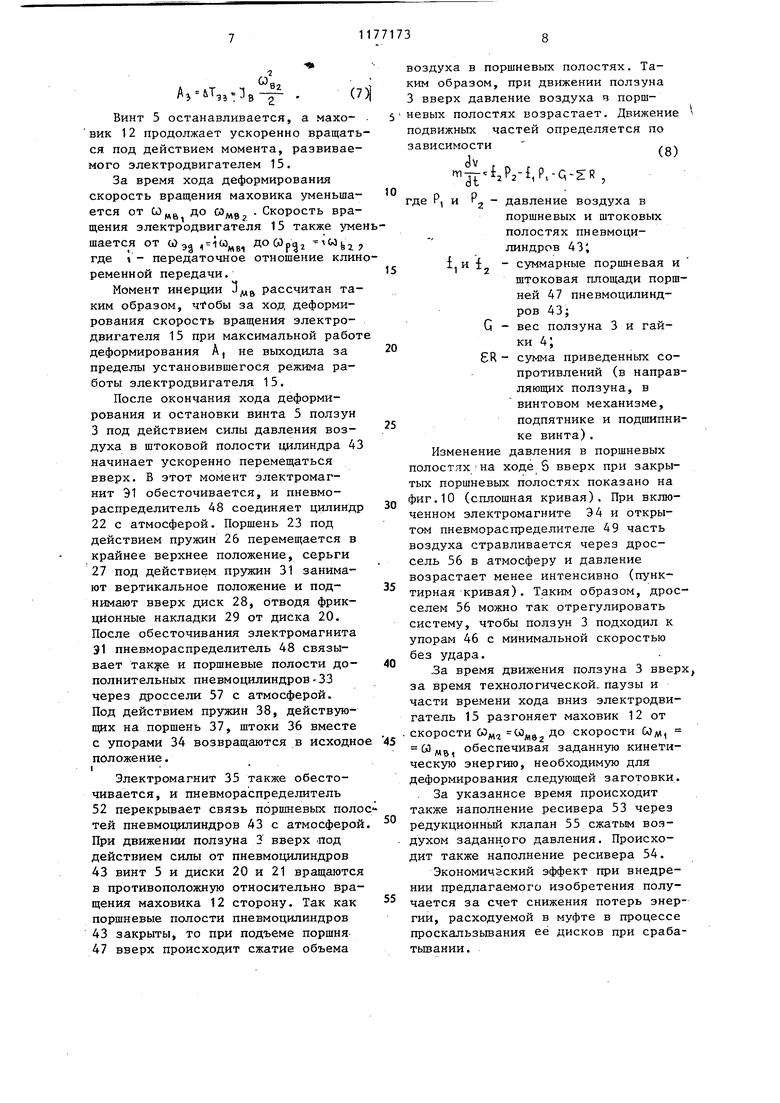
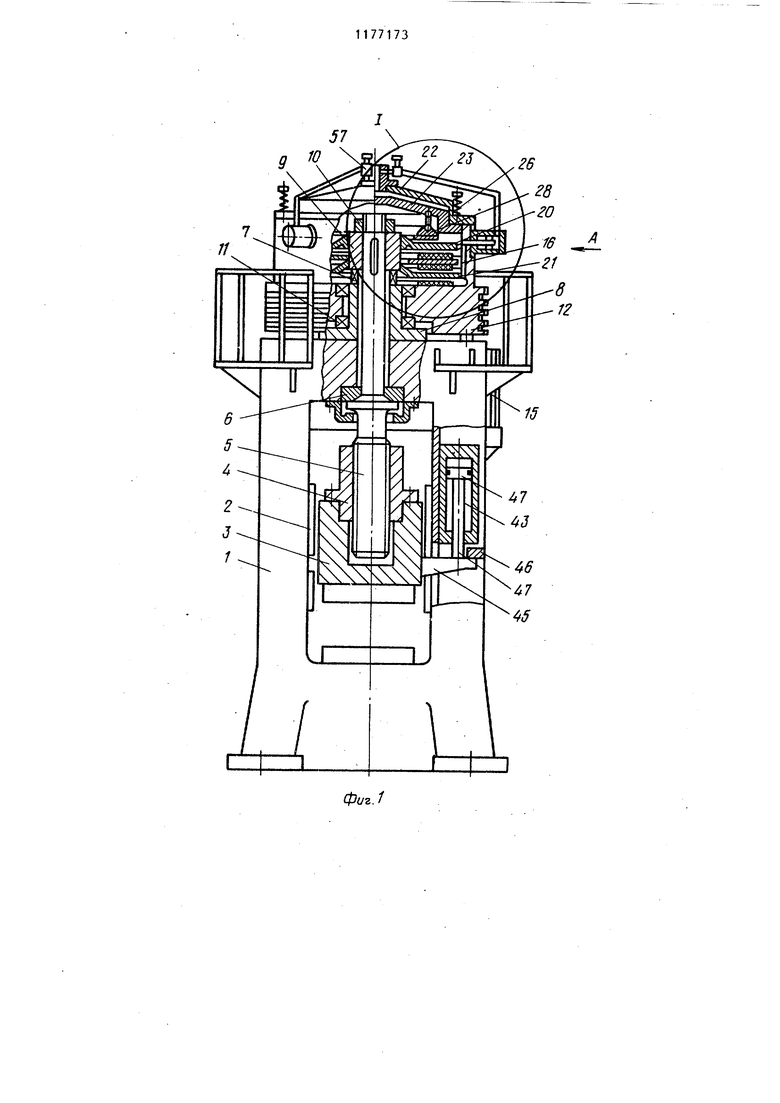
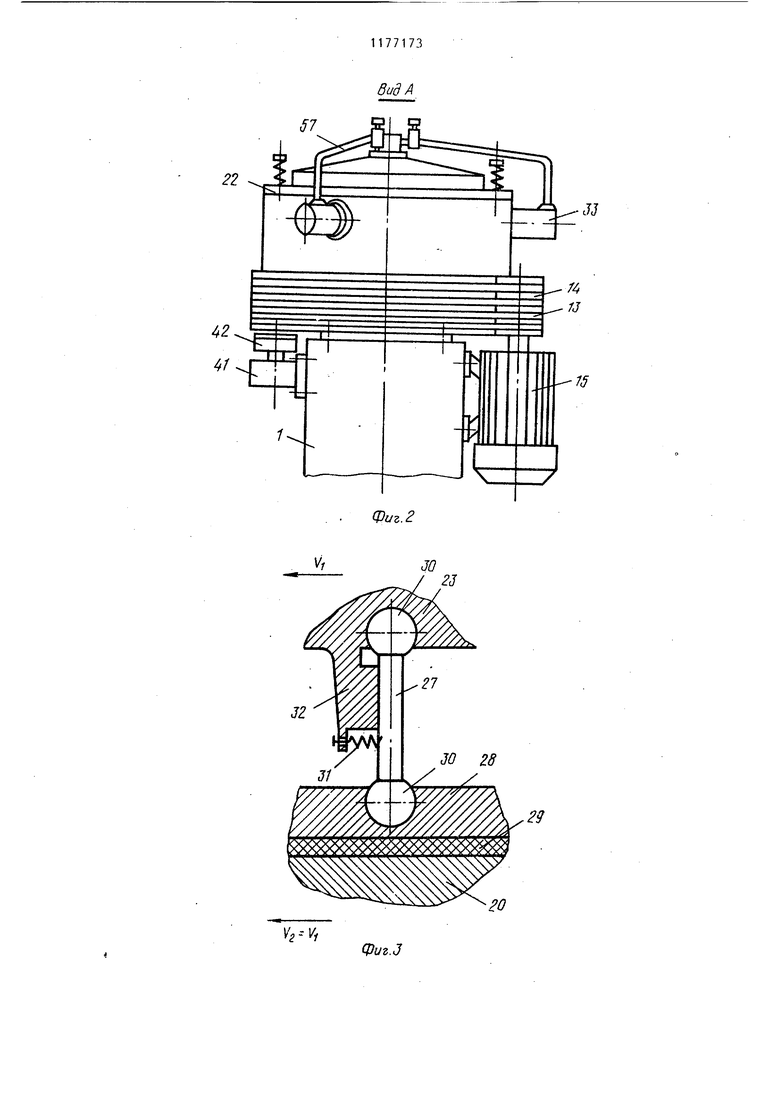
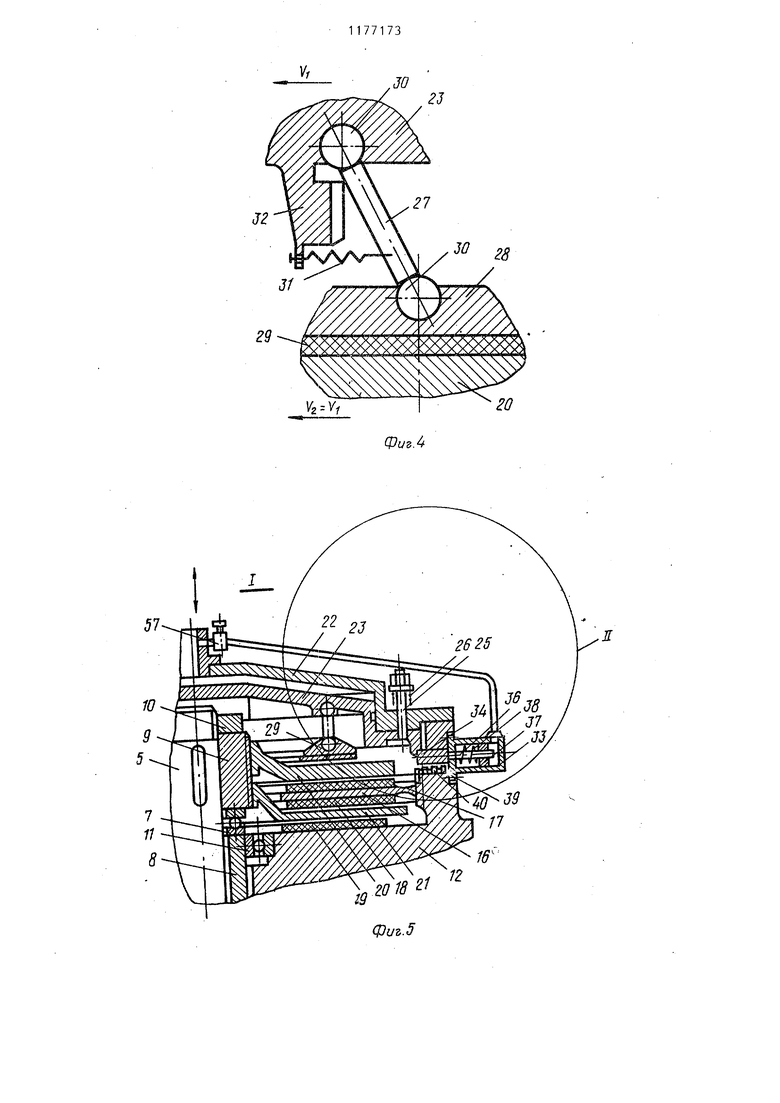
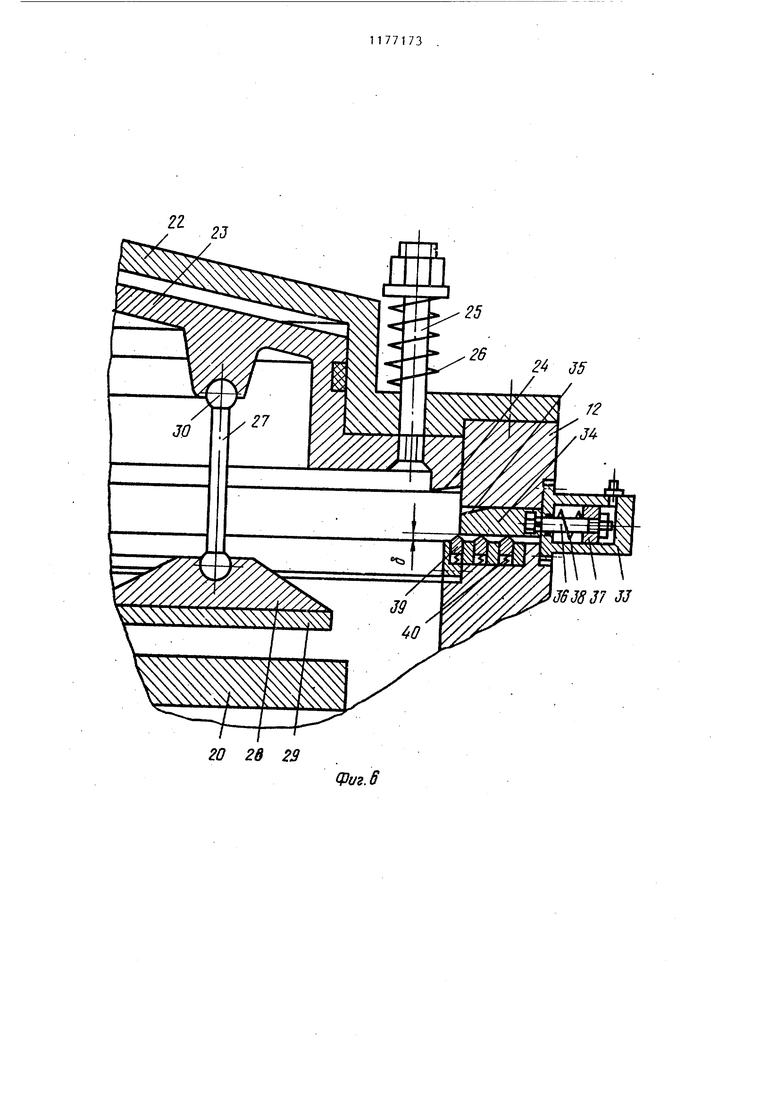
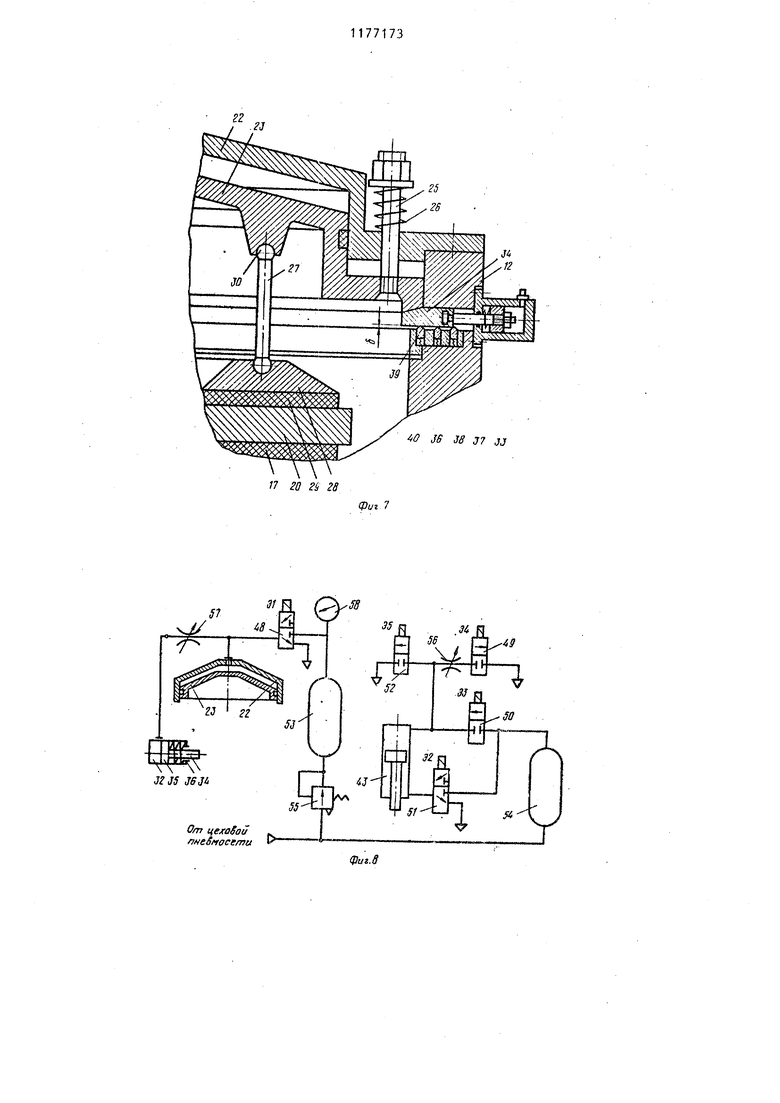
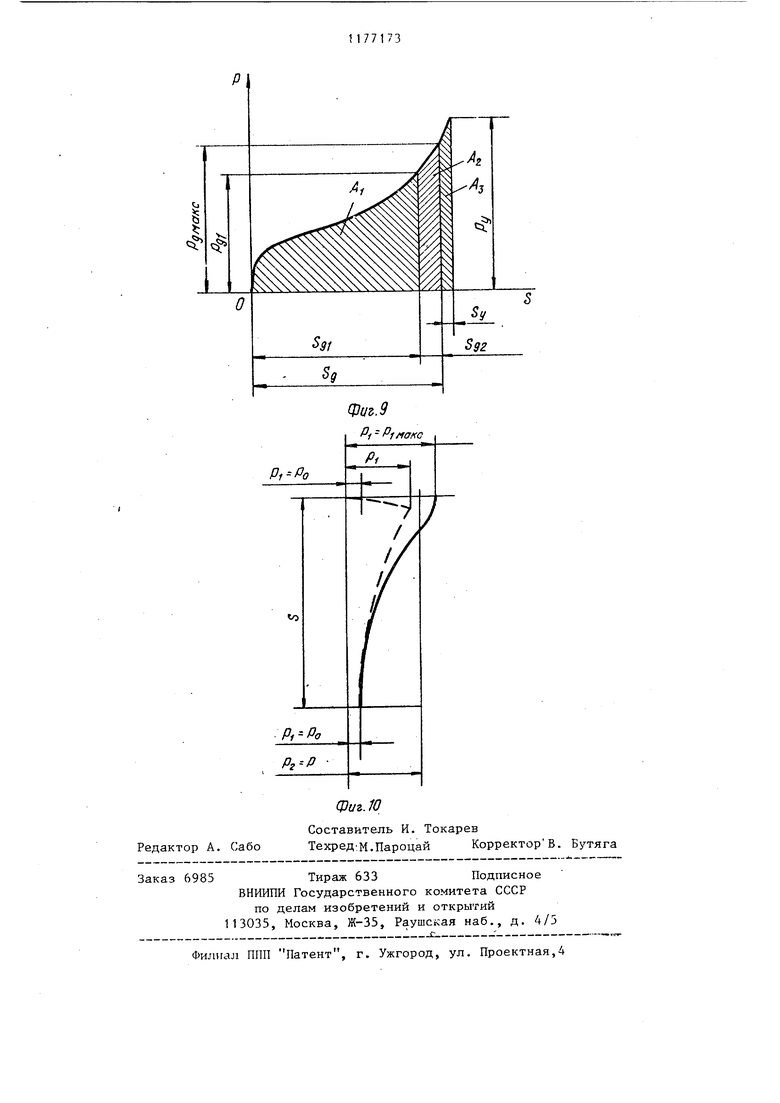
На фиг.1 изображен пресс с частичными разрезами, общий вид на фиг.2 - вид А на фиг,1; на фиг.З положение шарнирных упоров при включенной муфте и при срабатывании муфты; на фиг. 5 - узел I на фиг. 1 ; на фиг. 6 и 7 - узел II на фиг. 5 (при включенной и выключенной муфте); на фиг.8 пневматическая схема подключения и управления пневмоцилиндров фрикционной муфты, дополнительных цилиндров и возвратными цилиндрами; на фиг. 9 - графики распределения работ при деформировании заготовки; на фиг.10 - графики изменения давления в верхних полостях уравновешивающих цилиндров.
Винтовой пресс содержит станину 1, в направляющих 2 которой установлен ползун 3, в котором смонтирована гайка 4, сопряженная с винтом 5. Винт 5 установлен подвижно в подпятнике 6и подшипнике 7 на станине 1 пресса. Подшипник 7 установлен на втулке 8, которая жестко связана со станиной 1. На верхней части винта 5 закреплена шлицевая втулка 9, которая связана с винтом, например, шпоночным соединением и закреплена гайкой 10. На втулке 8 на подшипниках 11 установлен маховик 12, который клиноременной передачей 13 связан со шкивом 14 электродвигателя 15, который установлен на станине 1. На маховике 12 установлена управляемая фрикционная муфта, состоящая из ведущего фрикционного диска 16, связанного шлицевым соединением с маховиком 1 2 , На диске 16 закреплены фрикционные накладки 17 и 18. Фрикционная наклака 19 закреплена на маховике 12. Со шлицевой втулкой 19 связаны ведомые фрикционные диски 20 и 21,
Диски 16,20 и 21 подпружинены пружинами (не показаны) таким образом, чтобы при отключенной муфте фрикционные накладки 17-19 не соприкасались с дисками 20 и 21.
На маховике 12 установлен пненмоцилиндр 22, пг мпень 23 которого име71732
ет на торцовой части скосы 24 и ш-пицевьм соединением связан с маховиком 12 и подпружинен через шпильки 25 пружинами 26. С поршнем 23 посред5 ством серег 27 связан дополнительньй фрикционный диск 28 с фрикционной накладкой 29. Серьги 27 связаны с поршнем 23 и диском 28 посредством шарниров 30. Длина серег 27 выполнены таким образом, чтобы при отключенной муфте фрикционная накладка 29 не соприкасалась с диском 20. Серьги 27 подпружилены пружинами 31 к упорам 32. На маховике 12 установлены
5 дополнительные пневмоцилиндры 33 и упоры 34 со скосами 35. Упоры 34 связаны через штоки 36 с поршнями 37 подпружиненными пружинами 38. Упоры 34 взаимодействуют со штырями 39,
0 подпружиненными пружинами 40. На станине 1 установлен пневмоцилиндр 41, шток которого связан с тормозной колодкой 42 для торможения маховика 1 2.
5 На станине 1 пресса установлены пневмоцилиндры 43 (показан один цилиндр) , штоки 44 которых связаны с кронштейнами 45 ползуна 3. Верхнее
Ч положение кронштейнов 45 фиксируется
0 упорами 46. Штоки 44 пневмоцилиндров 43 связаны с поршнями 47.
Управление прессом осуществляется пневматической системой, состоящей, из двухпозиционных пневмо, распределителей ,ресиверов 53 и 54, редукционного клапана 55, дросселей 56 и 57 и манометра 58. Пресс работает следующим образом. В исходном положении электромагнит Э1 обесточен, пневмораспределитель 48 соединяет пневмоцилиндр 22 муфты с атмосферой, поршень 23 под действием пружин 26 находится в крайнем верхнем положении, а
5 упоры 34, связанные с поршнями 37 через шток 36 находятся в крайнем заднем положении под действием пружин 38. Диск 28 находится в крайнем верхнем положении. Муфта отQ ключена.
Электромагнит 32 включен, пневмораспределитель 51 соединяет ресивер. 54 со штоковой полостью пнеЕмоцилиндров 43 и удерживает ползун 3
5 в верхнем положении. Кронштейны
-45 упираются в упоры 46. Электромагниты ЭЗ-Э5 также обесточены. Включается электродвигатель 15, которой через шкив 14 и клиноременную передачу 13 разгоняет маховик 12 до заданной угловой скорости СОд. Маховик 12 запасает кинетическую энер, гию - / (1) где JM - момент инерции маховика. Для совершения хода разгона подвижных частей включается электромаг нит ЭЗ, электромагнит Э2 обесточивается. Штоковые полости пневмоцилиндров 43 соединяются с атмосферой а в поршневые полости пневмоцилиндров 43 подается воздух из рессивера 54. Под действием давления сжатого воздуха в пневмоцилиндрах 43 и веса ползуна 3, последний ускоренно пере мещается вниз с гайкой 4, которая разгоняет винт 5 и связанные с ним шлицевуго втулку 9 и диски 20 и 21,в сторону вращения маховика 12. Так как суммарный момент инерции винта 5, втулки 9 и дисков 20 я 21 существенно меньше момента инерции маховика 12, то разгон винта 5 осуществляется до скорости вращения маховика 12 на меньшей части хода ползуна 3 вниз. При достижении винтом 5 скорости вращения маховика 12 включается электромагнит Э1 которьй переключает пневмораспределитель 48, и сжатый воздух из рессивера 53 поступает в пневмоцилиндр 22 муфты. Под действием давления воздуха поршень 23 опускается вниз и через серьги 27 опускает вниз диск 28 с фрикционной накладкой 29. Под действием диска 28 и накладок 29 опускаются вниз диски 20,16 и 21. При этом диски 20 и 21, связанные с винтом 5, входят в контакт с махови ком 12 через фрикционные накладки 17 и 18 и диск 16-, и накладку 19. Муфта включена. Если с момента включения муфты скорость вращения винта 5 равна ско рости вращения маховика 12, то смык ние накладки 29 и диска 20 происходит без проскальзьшания, так как линейные скорости накладки 29 (V)) и диска 20 ( V) одинаковы. В случае если скорость вращения винта 5 больше скорости вращения маховика 12, то в момент смыкания накладки 29 и диска 20 происходит проскальзывани между накладкой 29 и диском 20, а при дальнейшем перемещении поршня 23 и дисками 20, 16 и 21 и накладками 17-19 до выравнивания скоростей вращения винта 5 и маховика 12. При этом серьги 27 прижимаются к упо рам 32 поршня 23 пружинами 31 и силой трения между накладками 29 и диском 20. При включении электромагнита Э пневмораспределитель 48 также связывает поршневые полости дополнительных- пневмоци-пиндров 33 через дроссели 57 с источником сжатого воздуха, Под действием давления сжатого воздуха поршни 37 вместе со штоками 36 перемещаются к центру вращения маховика 12, сжимая пружины 38 и тем самым перемещая упоры 34 до контакта их скосов 35 со скосами 24 поришя 23. Время перемещения упоров 34 настраивается с помйщью дросселей 57 таким образом, чтобы они подходили и упирались скосами 35 в скосы 24 поршня 23 до момента передачи муфтой крутящего момента, т.е. до начала хода деформирования. При включенной муфте винт 5 и маховик 12 вращаются как одно целое с кинетической энергией Т -Л ЭМ6 где w3j суммарный момент инерции маховика и винта других деталей, связинных с маховиком и винтом. Положение поршня 23, серег 27, дисков 20 и 28 показано на фиг.7. Электромагнит ЭЗ обесточивается, а электромагниты 92 и 35 включаются. Пневмораспределитель 51соединяет штоковую полость пневмоцилиндров 43 с ресивером 54, а пневмораспределит ель 52 соединяет поршневые полости пневмодилиндров 43 с атмосферой. Тем самым пневмоцилиндры 41 подготавливаются для возвратного хода ползуна 3. Перемещение вниз ползуна 3 продолжается только от маховика 12. При встрече рабочего инструмента заготовкой (не показаны) осущетвляется ход деформирования заготов-и. При этом работа деформирования осуществляется за счет накопленной инетической энергии маховика 12 винта 5. Электродвигатель 15 при абочем ходе не отключается и продолжает передавать энергию маховику 12, Во время рабочего хода усилие деформирования и крутящий, момент, передаваемый муфтой, увеличиваются Величина крутящего момента, переда ваемого муфтой без учета трения в винтовом механизме, подпятнике 6 и подшипнике 7, определяется по за симости M P -yгде Ра - усилие деформирования; Dfft - средний диаметр резьбы винта 5; об - угол наклона резьбы винта 5. .При достижении усилия Р gi н ходе Зд момент в винтовом механиз ме достигает момента настройки муф ты РЗ. При дальнейшем росте усилия деформирования диски 20 и 21 винта 5 проскальзывают относительно фрикн юнных накладок 17-19 и относител но маховика 12 и поршня 23. Скорость вращения винта 5 относительно скорости вращения маховик 12 уменьшается, поэтому линейная с рость V( перемещения шарниров 30, установленных в поршне 23 становит больше линейной скорости шарниров 30, установленных в диске 28, связанном фрикционной накладкой 29 с диском 20. Серьги 27 отклоняются о вертикального положения, обеспечивая проскальзывание фрикционных накладок относительно дисков.С целью свести к минимуму время срабатывания муфты применены упоры 34 которые уменьшают перемещение порш 23 в момент срабатывания муфты. Величина перемещения поршня 23 ост ется постоянной величиной, равной зазору 8 между нижней поверхностью упоров 34 и направляющими упоров в маховике 12. Величина зазора 8 и, следовательно, перемещение поршня 23 не зависят от износа фрикционных накладок муфты. В случае износа фрикционных накладок и дисков поршень 23 перемещается вниз на большее расстояние, чтобы передать необходимое усилие на диски 20, 16 и 21 и включить муфту. При этом после каждого включения муфты упоры 34 вступают в контакт с поршнем 23 после его остановки в нижем положении. Скосы 24 поршня 23 выполнены такой длины, чтобы обеспечить надежный контакт со скосами упоров 34 независимо от износа фрикционных накладок 29, 17, 18 и 19 и дисков 20, 16, 21 и положения упоров 34. Упоры 34 подпружинены к верхним направляющим поверхностям пружинами 40 через штыри 39 для обеспечения между нижними направляющими поверхностями маховика и упоров 34 зазоры 8,. Пружины 40 вьтолнены достаточно жесткими, чтобы не допустить перемещение упоров 34 под действием усилия, создаваемого поршнем 37. Диски 20, 16 и 21 под действием пружин (не показаны) расходятся; обеспечивая свободное вращение дисков 20 и 21 относитепьно маховика 12. Дальнейшее деформирование поковки до усилия Рд 0,,,. на ходе Sg осуществляется кинетической энергией винта 5. Часть энергии винта 5 после окончания хода деформирования расходуется на упругую деформацию пресса и штампа до усилия PU. Работа деформирования А| осуществляется кинетической энергией маховика и винта: .:г ..а .О, Э1 2 где Со /ив, - угловая скорость вращения маховика и винта перед началом хода деформирования; - угловая скорость вращения маховика и винта в момент срабатывания муфты. Работа деформирования 2 осуществляется кинетической энергией винта , (6) в 2. «в, в. угловая скорость вращения винта после отключения муфты; 2 угловая скорость вращения винта в конце хода деформирования. Работа упругой деформаци.и пресса и штампа осуществляется оставшейся кинетической энергией винта 2 Винт 5 останавливается, а маховик 12 продолжает ускоренно вращат ся под действием момента, развивае мого электродвигателем 15, За время хода деформирования скорость вращения маховика уменьша ется от до . Скорость вра щения электродвигателя 15 также ум шается от (Ogg Ьг где - передаточное отношение кли ременной передачи. Момент инерции / рассчитан та ким образом, за ход, деформирования скорость вращения электродвигателя 15 при максимальной рабо деформирования А, не выходила за пределы установившегося режима работы электродвигателя 15. После окончания хода деформирования и остановки винта 5 ползун 3 под действием силы давления воздуха в штоковой полости цилиндра 4 начинает ускоренно перемещаться вверх, В этот момент электромагнит 91 обесточивается, и пневмораспределитель 48 соединяет цилинд 22 с атмосферой. Поршень 23 под действием пружин 26 перемещается в крайнее верхнее положение, серьги 27 под действием пружин 31 занимают вертикальное положение и поднимают вверх диск 28, Отводя фрикционные накладки 29 от диска 20. После обесточивания электромагнита 31 пневмораспределитель 48 связывает так:ре и поршневые полости дополнительных пневмоцилиндров33 через дроссели 57 с атмосферой. Под действием пружин 38, действующих на поршень 37, штоки 36 вместе с упорами 34 возвращаются в исходн положение. I Электромагнит 35 также обесточивается, и пневмораспределитель 52 перекрывает связь поршневых пол тей пневмоцилиндров A3 с атмосферой При движении ползуна 3 вверх под действием силы от пневмоцилиндров 43 винт 5 и диски 20 и 21 вращаются в противоположную относительно вращения маховика 12 сторону. Так как поршневые полости пневмоцилиндров 43 закрыты, то при подъеме поршня 47 вверх происходит сжатие объема воздуха в поршневых полостях. Таким образом, при движении ползуна 3 вверх давление воздуха в поршневых полостях возрастает. Движение подвижных частей определяется по зависимости dv Tr i2P2-i,P, , где Р, и РЗ - давление воздуха в поршневых и штоковых полостях пневмоцилиндров 43, и 1 - суммарные поршневая и штоковая площади поршней 47 пневмоцилиндров 43; G - вес ползуна 3 и гайки 4J 6R - сумма приведенных сопротивлений (в направляющих ползуна, в винтовом механизме, подпятнике и подшипнике винта) , Изменение давления в поршневых полостлх на ходе 6 вверх при закрытых поршневых полостях показано на фиг,10 (сплошная кривая). При включенном электромагните Э4 и открытом пневмораспределителе 49 часть воздуха стравливается через дроссель 56 в атмосферу и давление возрастает менее интенсивно (пунктирная кривая), Таким образом, дросселем 56 можно так отрегулировать систему, чтобы ползун 3 подходил к упорам 46 с минимальной скоростью без удара. .За время движения ползуна 3 вверх, за время технологической., паузы и части времени хода вниз электродвигатель 15 разгоняет маховик 12 от скорости Ыд, н(в2 ° скорости Со л, С)3„ обеспечивая заданную кинетическую энергию, необходимую для деформирования следующей заготовки. . За указанное время происходит также наполнение ресивера 53 через редукционный клапан 55 сжатым воздухом заданного давления. Происходит также наполнение ресивера 54. Экономический эффект при внедрении предлагаемого изобретения получается за счет снижения потерь энергии, расходуемой в муфте в процессе проскальзьшания ее дисков при срабатьшании.
51
Ю
Л
26
Фиг.1
57
Vr
,
15
Фиг. 2
.J
29
23
28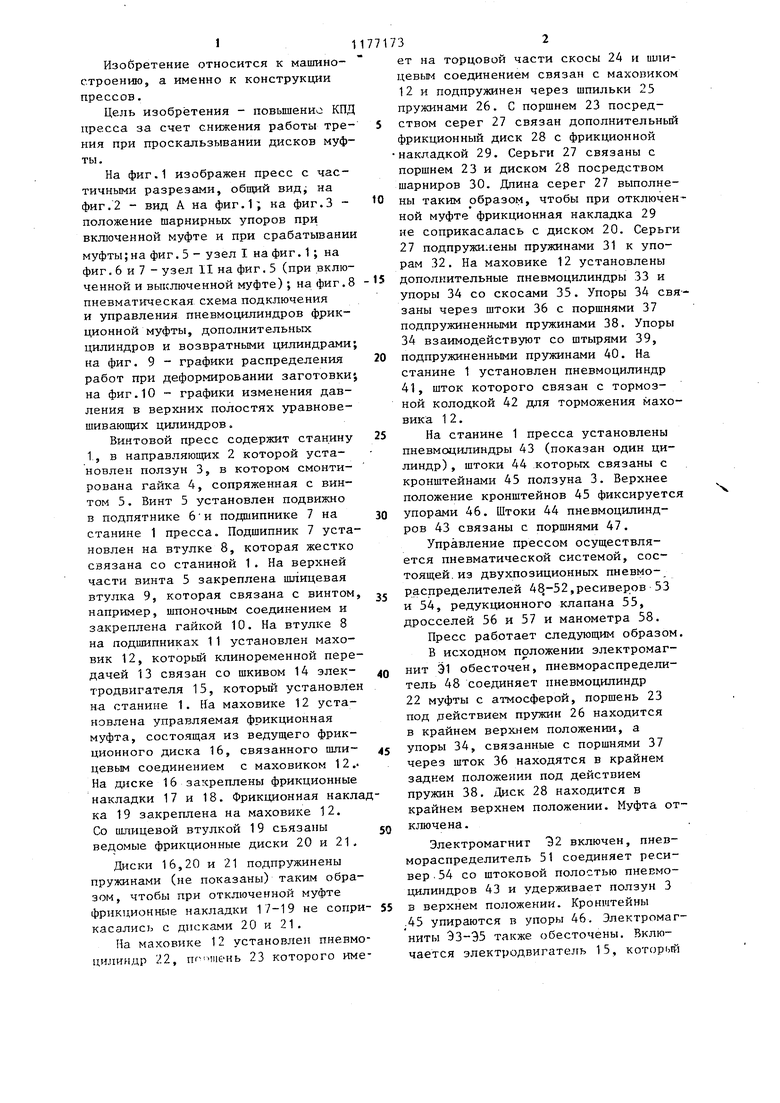
| название | год | авторы | номер документа |
|---|---|---|---|
| Винтовой пресс | 1983 |
|
SU1172745A1 |
| Винтовой пресс | 1986 |
|
SU1348216A1 |
| Винтовой пресс | 1987 |
|
SU1497043A1 |
| Винтовой пресс | 1988 |
|
SU1539076A1 |
| Винтовой пресс | 1989 |
|
SU1662868A1 |
| Винтовой пресс | 1989 |
|
SU1646892A1 |
| Винтовой пресс | 1985 |
|
SU1263539A1 |
| Винтовой пресс | 1990 |
|
SU1750955A1 |
| Винтовой пресс | 1988 |
|
SU1523394A1 |
| Винтовой пресс для штамповки с кручением | 1988 |
|
SU1555142A1 |
ВИНТОВОЙ ПРЕСС, содержапщй смонтированный в направляющих станины ползун с закрепленной в нем гайкой, сочлененной нарезкой с винтом, размещенным с возможностью вращения в опорах станины, приводной маховик и связьюающую маховик с винтом фрикционную муфту с ведущими и ведомыми дисками и дополнительным фрщсционным диском, связанным при помощи серег с поршнем муфты, а также силовые цилиндры, причем на поршне муфты выполнены упоры ограничения поворота серег, отличающийся тем, что, с целью повышения КПД, он снабжен установленными на маховике дополнительными дросселями и пневмоцилиндрами со штоками и связанными с последними упорами, а также подпружиненными штырями, Смонтированными с возможностью контакта с упорами, на торцовой поверхности поршня муфты и на упорах вьшолнены соответствующие один i (Л другому скосы, а поршневые полости дополнительных пневмоцилиндров связаны через дроссели с полостью пневмоцилиндра муфты.
го 18 2
фиъ.5
Фиг. 6
| Авторское свидетельство СССР № 1143613, кл | |||
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
