Изобретение относится к области машиностроения для легкой промышленности и касается робототехнических комплексов для подачи деталей в зону обработки.
Цель изобретения - повышение надежности работы и расширение технологических возможностей устройства.
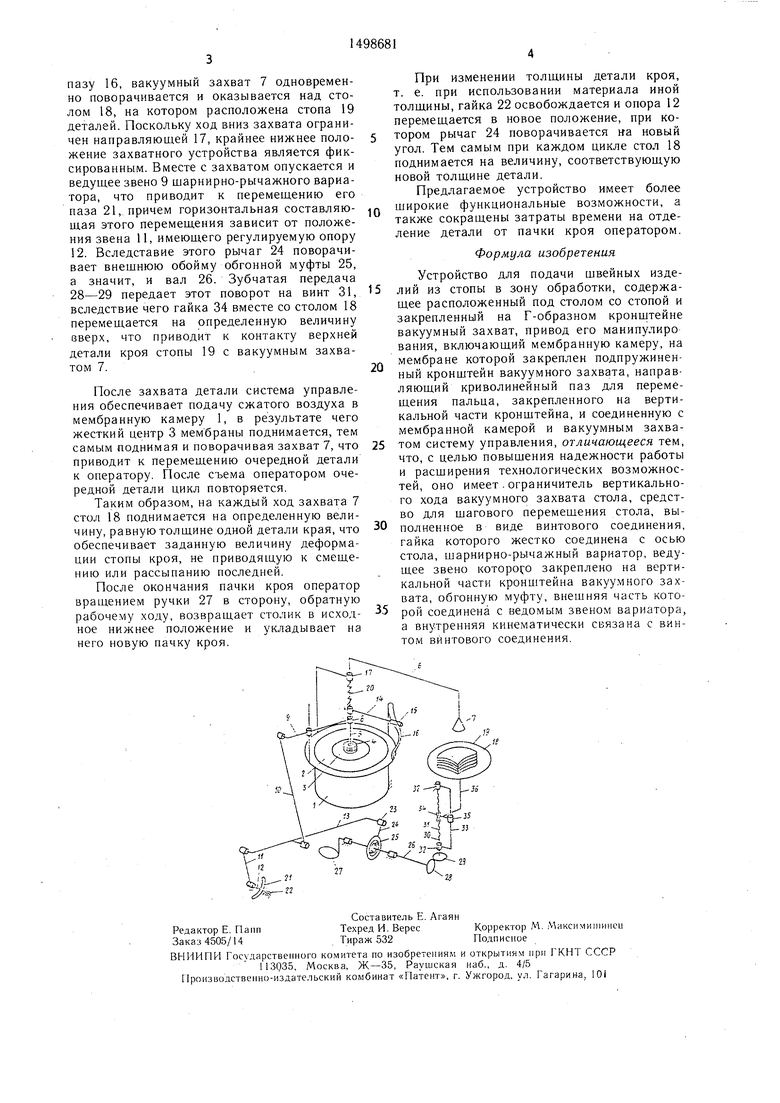
На чертеже изображена кинематическая схема устройства.
Основным элементом устройства является мембранная камера 1 с укрепленной на ней герметично мембраной 2. На мембране установлен жесткий центр 3, с которым благодаря наличию шарнира 4 соединена вертикальная часть 5 Г-образного кронштейна с вакуумным захватом 7. На вертикальной части 5 кронштейна размеш,ен шарнир 8 ведуш,его звена 9 шарнирно-рычажного вариатора 10-13, а также палец 14, на котором укреплен ролик 15, находящийся в криволинейном пазу 16. Вертикальная часть 5 кронштейна 6 с вакуумным захватом находится в направляющей 17, которая служит также ограничителем хода захвата 7 к столу 18 со стопой 19. Между направляющей 17 и пальцем 14 расположена
возвратная пружина 20. Звено 11 щарнйрно- рычажного вариатора связано с опорой 12, которая находится в криволинейном пазу 21 и несет на себе гайку 22. Звено 13 шарнирно-рычажного вариатора посредством шарнира 23 связано с рычагом 24, который жестко укреплен на внешней обойме обгонной муфты 25. Внутренняя обойма обгонной муфты 25 установлена на валу 26, который на одно.м конце несет возвратную ручку 27, а на другом - коническое зубчатое колесо 28, находящееся в зацеплении с вторым коническим зубчатым колесом 29. Зубчатое колесо 29 установлено на вертикальном валу 30, имеющем винтовую часть 31 и находящемся в опорах 32, к которым прикреплена направляющая 33. На винте 31 установлена гайка 34, связанная с ползущкой 35 и осью 36 стола 18.
Устройство работает следующи.м образом.
После съема операторо.м с захватного устройства очередной детали возвратная пружина 20 опускает жесткий центр мембраны 2, а следовательно, и кронштейн 6, причем, поскольку ролик 15, находящийся на пальце 14, расположен в криволинейном
(Л
4
оо
05
оо
пазу 16, вакуумный захват 7 одновременно поворачивается и оказывается над столом 18, на котором расположена стопа 19 деталей. Поскольку ход вниз захвата ограничен направляющей 17, крайнее нижнее положение захватного устройства является фиксированным. Вместе с захватом опускается и ведущее звено 9 щарнирно-рычажного вариатора, что приводит к перемещению его паза 21, причем горизонтальная составляющая этого перемещения зависит от положения звена 11, имеющего регулируемую опору 12. Вследставие этого рычаг 24 поворачивает внещнюю обойму обгонной муфты 25, а значит, и вал 26. Зубчатая передача 28-29 передает этот поворот на винт 31, вследствие чего гайка 34 вместе со столом 18 перемещается на определенную величину вверх, что приводит к контакту верхней детали кроя стопы 19 с вакуумным захватом 7.
После захвата детали система управления обеспечивает подачу сжатого воздуха в мембранную камеру 1, в результате чего жесткий центр 3 мембраны поднимается, тем самым поднимая и поворачивая захват 7, что приводит к перемещению очередной детали к оператору. После съема оператором очередной детали цикл повторяется.
Таким образом, на каждый ход захвата 7 стол 18 поднимается на определенную величину, равную толщине одной детали края, что обеспечивает заданную величину деформации стопы кроя, не приводящую к смещению или рассыпанию последней.
После окончания пачки кроя оператор вращением ручки 27 в сторону, обратную рабочему ходу, возвращает столик в исходное нижнее положение и укладывает на него новую пачку кроя.
При изменении толщины детали кроя, т. е. при использовании материала иной толщины, гайка 22 освобождается и опора 12 перемещается в новое положение, при котором рычаг 24 поворачивается на новый угол. Тем самым при каждом цикле стол 18 поднимается на величину, соответствующую новой толщине детали.
Предлагаемое устройство имеет более щирокие функциональные возможности, а также сокращены затраты времени на отделение детали от пачки кроя оператором.
Формула изобретения
Устройство для подачи швейных изде5 ЛИЙ из стопы в зону обработки, содержащее расположенный под столом со стопой и закрепленный на Г-образном кронштейне вакуумный захват, привод его манипулиро вания, включающий мембранную камеру, на
f, мембране которой закреплен подпружиненный кронщтейн вакуумного захвата, направляющий криволинейный паз для перемещения пальца, закрепленного на вертикальной части кронщтейна, и соединенную с мембранной камерой и вакуумным захва5 том систему управления, отличающееся тем, что, с целью повышения надежности работы и расщирения технологических возможностей, оно имеет.ограничитель вертикального хода вакуумного захвата стола, средство для шагового перемещения стола, вы0 полненное в виде винтового соединения, гайка которого жестко соединена с осью стола, щарнирно-рычажный вариатор, ведущее звено KOTOpoi; 0 закреплено на вертикальной части кронщтейна вакуумного захвата, обгонную муфту, внешняя часть кото5 рой соединена с ведомым звеном вариатора, а внутренняя кинематически связана с винтом винтового соединения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный комплекс для листовой штамповки | 1979 |
|
SU774722A1 |
| УСТРОЙСТВО ДЛЯ БУРЕНИЯ СКВАЖИН | 1990 |
|
RU2018621C1 |
| Устройство для шагового перемещения | 1986 |
|
SU1342687A1 |
| РЫЧАЖНЫЙ ВАРИАТОР | 2011 |
|
RU2467227C1 |
| Автоматическое устройство для изготовления биполярных электродов химического источника тока | 1975 |
|
SU557439A1 |
| Механический вариатор скорости вращения | 1985 |
|
SU1414990A1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1979 |
|
RU2014480C1 |
| Устройство для укладки в стопу плоских изделий | 1978 |
|
SU749768A1 |
| ВАРИАТОР | 2018 |
|
RU2678179C1 |
| ВАРИАТОР | 2018 |
|
RU2762220C1 |
Изобретение относится к машиностроению для легкой промышленности ,в частности, к устройству для подачи швейных изделий из стопы в зону обработки, и позволяет повысить надежность работы и расширить технологические возможности устройства. Устройство состоит из мембранной камеры, на мембране которой жестко закреплен подпружиненный Г-образный кронштейн с вакуумным захватом, ограничитель хода захвата к столу со стопой, имеющему средство для пошаговой его подачи к захвату. Средство для пошаговой подачи стола имеет винтовое соединение, шарнирно-рычажный вариатор, обгонную муфту, кинематически связанные между собой и с кронштейном вакуумного захвата. 1 ил.
| Устройство для управления механизмом подачи изделий в зону обработки | 1984 |
|
SU1202992A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
