в
NU
СО
со to
3
1499121
корпуса 2, нрлщлюще.I OCH с IIDCTOHHHOII rKopocTijro, Время между рег истрацней снстопого пучка от опорного излучателя 1 и излучающих об октоп 8, пропорциональное измеряемому углу, рлн- ио длительности импульсов, которые формируются блоком 7 визирования и блоком измерения. С помощью блока индикации осущес.тпляется регистрация
4
уг лл в ЦИФ110ПОМ пиде. Повышение точности достигается гтробированием блока измерения сигналом от путевого выключатепя, использонанием оптической связи между блоком 7 и блоком измерения, позволяет повысить скорость вращения корпуса 2 и осуществить накопление полезного сигнала. 2 3.п. ф-лы, 5 ил.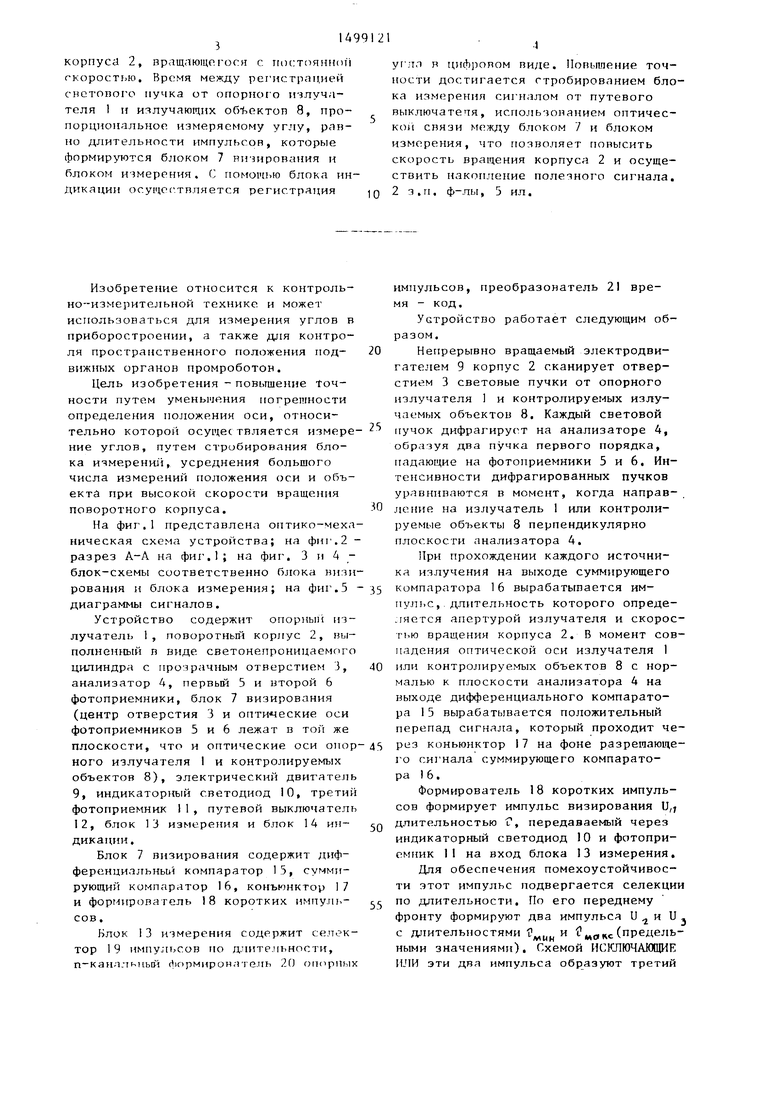

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля положения объекта относительно опорного луча и устройство для его осуществления | 1987 |
|
SU1674368A1 |
| Лазерное устройство для контроля непараллельности | 1987 |
|
SU1682777A1 |
| Устройство автоматизированного контроля исправности механизма автосцепки | 1987 |
|
SU1619036A1 |
| УСТРОЙСТВО ДЛЯ ЦЕНТРОВКИ СУДОВЫХ МЕХАНИЗМОВ | 1990 |
|
RU2033596C1 |
| Устройство для измерения линейных размеров | 1988 |
|
SU1585668A1 |
| Устройство для измерения параметров кодовых дисков | 1985 |
|
SU1339889A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД | 2008 |
|
RU2375817C1 |
| Устройство для измерения перемещений | 1989 |
|
SU1627835A1 |
| Двухкоординатный оптический преобразователь перемещения в напряжение | 1987 |
|
SU1442833A1 |
| Преобразователь перемещения в код | 1983 |
|
SU1156255A1 |

Изобретение относится к контрольно-измерительной технике и может использоваться для измерения углов в приборостроении, а также для контроля пространственного положения подвижных органов промроботов. Цель изобретения - повышение точности за счет уменьшения погрешности определения положения оси, относительно которой осуществляется измерение угла, путем стробирования блока измерений, усреднения большого числа измерений положения оси и объекта при высокой скорости вращения поворотного корпуса. С помощью анализатора 4 и фотоприемников 5 и 6, включенных по дифференциальной схеме, определяют момент попадания светового пучка от излучателя в отверстие 3 поворотного корпуса 2, вращающегося с постоянной скоростью. Время между регистрацией светового пучка от опорного излучателя 1 и излучающих объектов 8, пропорциональное измеряемому углу, равно длительности импульсов, которые формируются блоком 7 визирования и блоком измерения. С помощью блока индикации осуществляется регистрация угла в цифровом виде. Повышение точности достигается стробированием блока измерения сигналом от путевого выключателя, использованием оптической связи между блоком 7 и блоком измерения, что позволяет повысить скорость вращения корпуса 2 и осуществить накопление полезного сигнала. 2 з.п.ф-лы, 5 ил.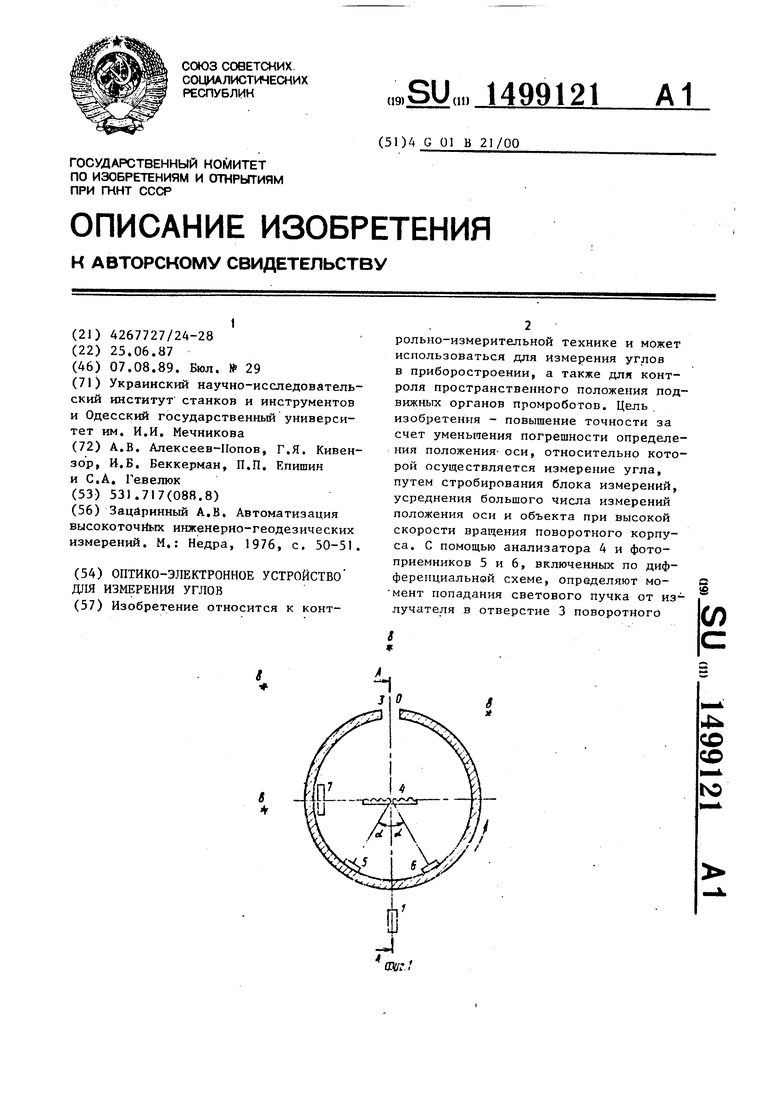
Изобретение относится к контроль- но--измеритель 1ой технике и может использоваться для измерения углов в приборостроении, а также для контроля пространственного положения подвижных органон промроботон.
Цель изобретения - повышение точности путем уменьшения погрешности определения положения оси, относительно KOTOpoii осуществляется измерение углов, путем стробирования блока измеренш , усреднения большого числа измерений положения оси и объ- ектй при высокой скорости вращения поворотного корпуса,
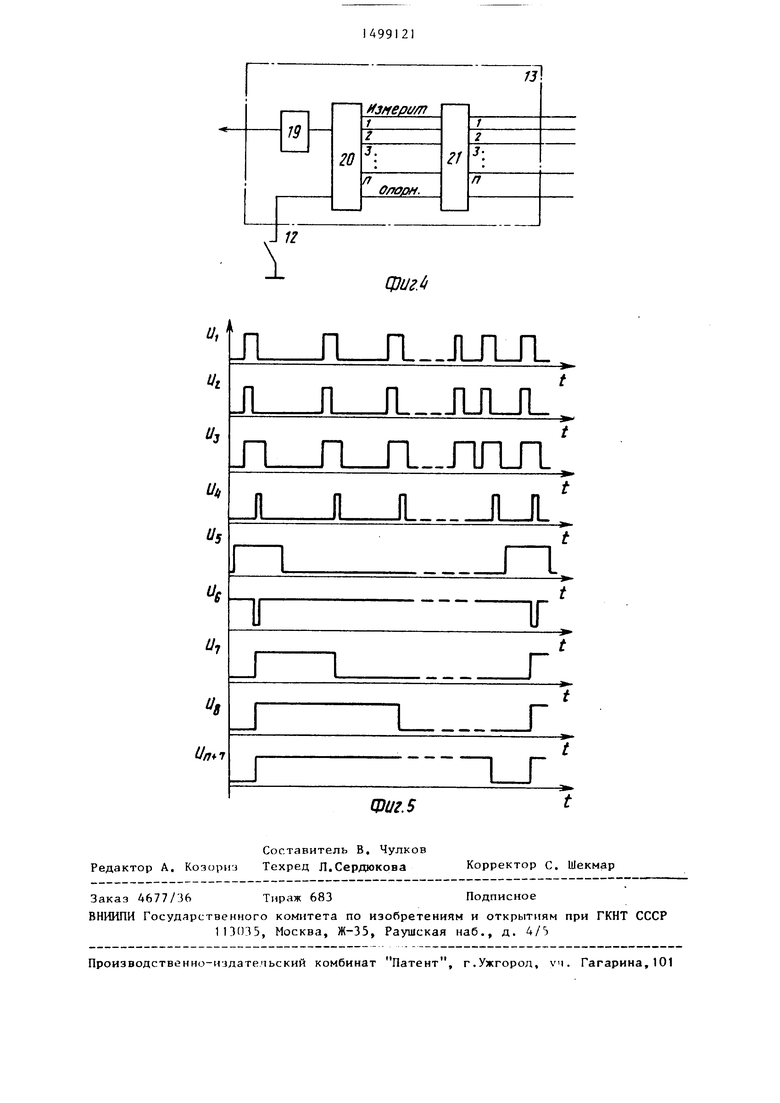
На фиг.1 представлена оптико-механическая схема устройства; на фиг.2 - разрез А-А на фиг.1; на фиг. 3 и 4 - блок-схемы соответственно блока визирования и блока измерения; на фиг.5 - диаграммы сигналов.
Устройство содержит опорньп излучатель 1, поворотный корпус 2, пы- нолненный в виде светонепроницаемого цилиндра с прозрачным отверстием 3, анализатор 4, первый 5 и второй 6 фотоприемники, блок 7 визирования (центр отверстия 3 и оптические оси фотоприемников 5 и 6 лежат в той же плоскости, что и оптические оси опорного излучателя 1 и контролируемых объектов 8), электрический двигатель 9, индикаторный светодиод 10, третий фотоприемник 11, путевой выключатель 12, блок 13 измерения и блок 14 индикации.
Блок 7 визирования содержит диф- ференциальньи компаратор 15, суммирующий компаратор 16, конъюнктор 17 и форг 1ирователь 18 коротких импу,гп-- сов.
Клок 13 измерения содержит селектор 19 импульсов по длительности, n-Kann:ibnbrfi (юрмиронате.пь 20 опорных
импульсов, преобразователь 21 время - код.
Устройство работает следующим образом.
Непрерывно вращаемый электродвигателем 9 корпус 2 сканирует отверстием 3 световые пучки от опорного излучателя 1 и контролируемых излучаемых объектов 8. Каждый световой
пучок дифрагирует на анализаторе 4, образуя два пУчка первого порядка, падающие на фотоприемники 5 и 6. Интенсивности дифрагированных пучков уравниваются в момент, когда направ-.
лсние на излучатель 1 или контролируемые об15екты 8 перпендикулярно плоскости анализатора 4.
При прохождении каждого источника излучения на выходе суммирующего
компаратора 16 вырабатывается импульс, длительность которого определяется апертурой излучателя и скорос- Т1 Ю вращения корпуса 2. В момент совпадения оптической оси излучателя 1
или контролируемых объектов 8 с нормалью к плоскости анализатора 4 на выходе дифференциального компаратора 15 вырабатывается положительный перепад сигнала, который проходит чеpti3 коньюнктор 17 на фоне разрешающего сигнала суммирующего компаратора 16.
Формирователь 18 коротких импульсов формирует импульс визирования ll,j
длительностью L, передаваемый через индикаторный светодиод 10 и фотоприемник 11 на вход блока 13 измерения. Для обеспечения помехоустойчивости этот импульс подвергается селекции
по длительности. По его переднему
фронту формируют два импульса U , и U , с длительностями Р и f (предельными значениями). Схемой ИСКЛЮЧАЮЩИЕ ИЛИ эти два импульса образуют третий
импульс длительностью (f
макс
мим
),
на фоне которого полезный сигнал 1),, сформированный по спаду входного импульса и , может пройти на вход формирователя 20 измерительных импульсов. Таким образом, любые импульсы, возникпше вследствие электро- и радиопомех с длительностью или мин будут подавлены селектором 19 импульсов по длительности (фиг.95. Полезный сигнал в виде импульса и, поступает на вход формирователя 2 опорных импульсов. В начальный момент времени при визировании опорного излучателя 1 этот сигнал совпадает с разрешающим сигналом Uj от путевого выключателя 12 и приводит в нуль все D-триггеры (не показаны) формирователя 21 опорных импульсов. При этом формируется сигнал опорного канала Период U, а на выходах формирователя 21 начинается форми)юва- ния измерительных импульсов U,Ug,..
Импульс U|, выработанный при визировании первого из контролируемых объектов 8 и прошедший через селектор 19, перевозит в единицу соответствующий триггер формирователя 20. При этом заканчивается формирование измерительного импульса U .
Следующий импульс 1)4 от второго контролируемого объекта, проходя по входной шине, устанавливает в единицу Другой D-триггер, заканчивая формирование измерительного импульса
Un на втором выходе формирователя 20 о
Затем этот процесс продолжается до визирования п-го объекта. В конце оборота вырабатывается очередной импульс и и цикл измерения начинается заново.
Длительность каждого из полученных п-измерительных импульсов U, U.,...,Uj позволяет судить об угловом положении каждого из п контролируемых объектов 8.
С помощью преобразователя 21 время - код информация об угловом положении объектов 8 представляется в числовом виде и используется для накопления , Формула изобретения
0 .
.
10
15
20
25
30
35
40
45
50
55
ный излучатель, поворотньш корпус, выполненный в виде светонепроницаемого полого тела вращения с отверстием и установленный с возможностью вращения вокруг оси, перпендикулярной плоскости измеряемых углов, установленные в поворотном корпусе анализатор, оптически связанный с отверстием, и первый и второй фотоприемники, послеГдовательно соединенные блок визирования, блок измерения и блок индикации, выходы фотоприемников соединены соответственно с первым и вторым входами блока визирования, отличающееся тем, что, с целью повышения точности, оно снабжено путевым выключателем, предназначенным для срабатывания при совпадении оптической оси анализатора с направлением на опорный излучатель, индикаторным световодом, установленным на поворотном корпусе, вход которого соединен с выходом блока визирования, третьим фотоприемником, оптически связанным с индикаторным светодиодом, выход третьего фотоприемника соединен с входом блока измерения, который выполнен с управляющим входом, соединенным с выходом нулевого выключателя.
Ц)иг.З
| Зацйринный А.В, Автоматизация высокоточных инженерно-геодезических измерений | |||
| М.: Недра, 1976, с | |||
| Устройство для выпрямления многофазного тока | 1923 |
|
SU50A1 |
