У1
Изобретение относится к гусеничным транспортным средствам для перевозки длинномерных грузов в полупогруженном положении, преимущественно к лесозаготовительным треле- ВОЧНЙ1М машинам.
Цель изобретения - улучшение эк-г- плуатационных характеристик путем повьпиения проходимости на поворотах при,упоре груза в грунт.
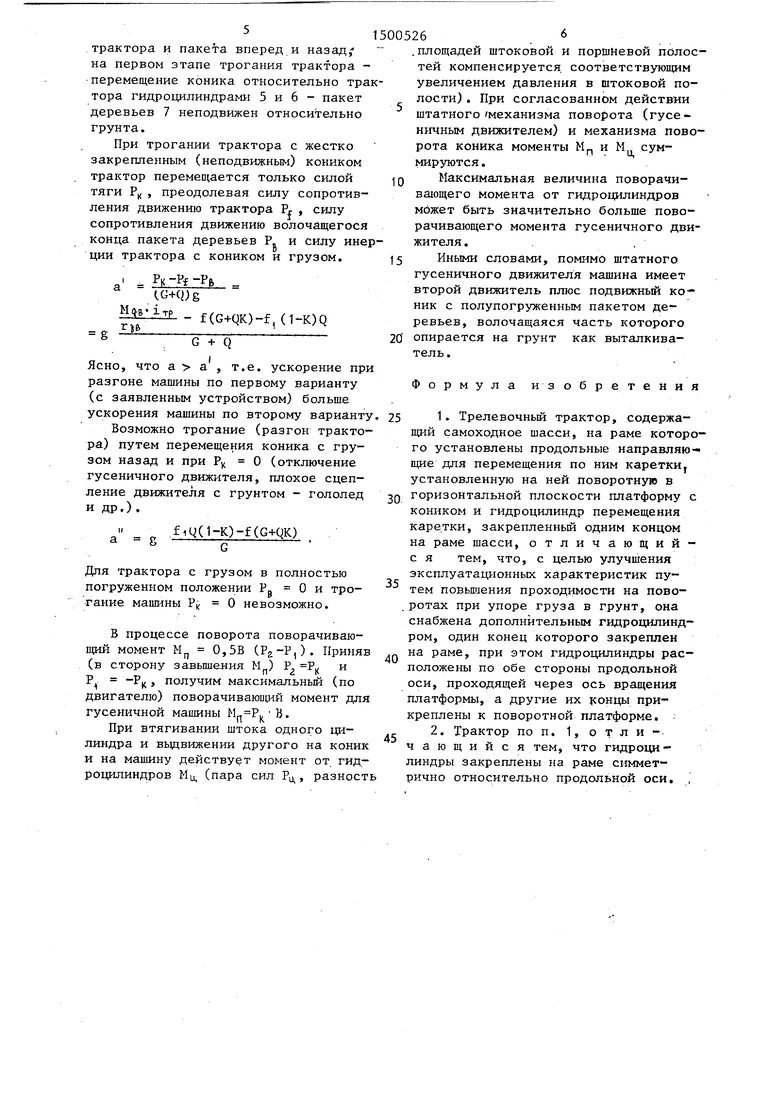
На фиг,1 показан трелевочньш трактор, вид сбокуJ на фиг.2 - вид А на фиг.1; на фиг.З - разрез Б-Б на фиг.2.
Трелевочный трактор содержит самоходное шасси 1, включающее продольные направляющие 2, на которых с возможностью возвратно-поступательного перемещения установлена каретка 3, На последней через подшипник закреплена поворотная платформа 4 с коником. Платформа 4 поворачивается в горизонтальной плоскости вокруг ее вертикальной оси приводом, содержащим гидроцилиндры 5 ц 6,один из них закреплен корпусом по одну а второй - по другую сторону про- дольной оси рамы. Штоками гидроцилиндры 5 и 6 закреплены на поворотной платформе 4 по обе стороны продольной оси, проходящей через ось вращения платформы 4. Пакет древесины зажат коником, закрепленным на 4.
Гидроцилиндры 5 и 6 могут включаться как совместно, так и раздельно что обеспечивается гидрораспределителями (условно не показаны). Для уменьшения нагрузки на подшипни при повороте платформы 4 гидроцилиндры 5 и 6 расположены в горизонтальной плоскости симметрично относительно продольной оси трактора.
Для поворота груженого трактора вправо платформу 4 с- коником необ- Ьсодимо повернуть против часовой стрелки, т.е. правьй (по ходу движения машины) гидроцилиндр необходимо включить на втягивание штока, а ле- вьй - на вьщвижение штока. Аналогич но выполняется поворот трактора влево. При этом каретка 3 вдоль остова машины не перемещается
Для перемещения каретки 3 вперед (на фиг.1 показано пунктирной линией) оба гидро1щливдра 5 и 6 необходимо включить на втягивание штоков, а для перемещения назад - на
0
5
0
b
0
5
вьщвижение штоков. При зтом поворот- .ная платформа 4 не изменяет своего углового расположения относительно шасси 1.
Для продольного перемещения каретки 3 вперед с одновременным поворотом поворотной- платформы 4 против . часовой стрелки правьш гидрощшиндр 5 необходимо включить на втягивание штока. Втягивание штока левого гид- роцилиндра 6 приводит к перемещению и повороту платформы 4 по часовой стрелке. Вьщвижение штока левого гидроцилиндра 6 при неподвижном правом приводит к перемещению коника назад (выталкиванию трактора) с одновременным поворотом трактора вправо, Вьщвижение штока правого гидроцилиндра 5 приводит к перемещению коника назад и повороту трактора, влево.
При включении цилиндров на выталкивание (перемещение коника с грузом 7 назад) и при трогании (разгоне) трактора вперед на горизонтальном участке («(; 0) усилие гидроцилиндров 2Р суммируется с с.илой тяги Р гусеничного движителя с грунтом и перемещает машину вперед, преодоле- : вая силу сопротивления движению машины Р и силу инерции машины.
. - PK+2Pu,-P.f G/g -
М Ь 1тр
Гуь
+ f. Ч (1-K)-f(G+QK)
0
5
0
5
где
а G
Q
ьЦб KQ
S ускорение машины; вес машины; вес груза ,
крутящий момент двигателя; вес груза, воспринимаемый машиной;
передаточное число трансмиссии;
радиус звездочки (ведущего колеса) гусеничного движителя ;
Q(1-K)-Bec груза, воспринимаемый грунтом;
ускорение свободного падения;
коэффициенты трения; f(Q(1-K) - сила сопротивления движению волочащегося пакета.
Для простоты рассуждения принято: и РЬ одинаковы при перемещении
Е f,f.
трактора и пакета вперед и назадj на первом этапе трогания трактора - перемещение коника относительно тратора гидроцилиндрами 5 и 6 - пакет деревьев 7 неподвижен относительно грунта.
При трогании трактора с жестко закрепленным (неподвижным) коником трактор перемеп1ается только силой тяги Р| , преодолевая силу сопротивления движению трактора Рг , силу сопротивления движению волочащегося конца пакета деревьев Р, и силу инеции трактора с коником и грузом.
а РК -Pf -Pfc tG+Q)g
g
f(G+QK)-f. (1-K)Q &
G + Q
10
500526,6
.площадей штоковой и поршневой полостей компенсируется, соответствующим увеличением давления в ютоковой полости) . При согласованном действии штатного механизма поворота (гусе- нргчным движителем) и механизма поворота коника моменты М и М. суммируются .
Максимальная величина поворачивающего момента от гидроцилиндров может быть значительно больше поворачивающего момента гусеничного движителя.
Иными словами, помимо штатного гусеничного движителя машина имеет второй движитель плюс подвижный коник с полупогруженным пакетом деревьев, волочащаяся часть которого опирается на грунт как выталкиватель .
15
20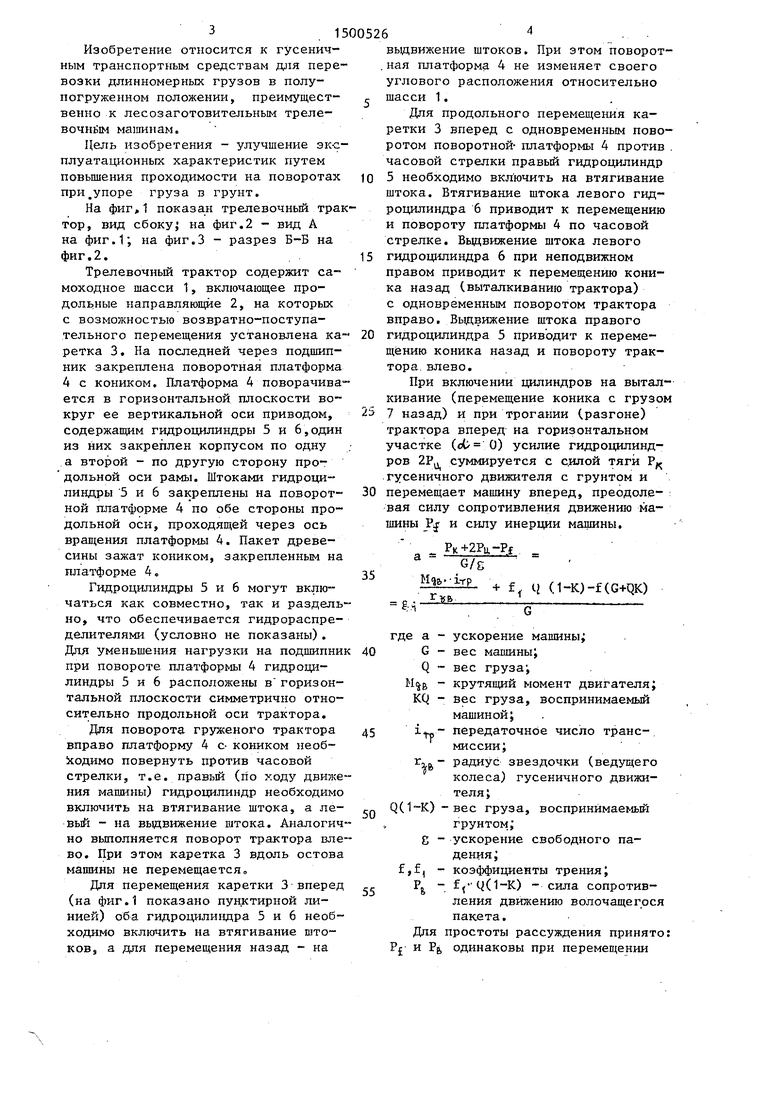
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕЛЕВОЧНЫЙ ТРАКТОР | 1994 |
|
RU2083392C1 |
| НАВЕСНАЯ ТРЕЛЕВОЧНАЯ ТЕЛЕЖКА | 2022 |
|
RU2785391C1 |
| ПОГРУЗОЧНОЕ УСТРОЙСТВО ТРЕЛЕВОЧНОГО ТРАКТОРА | 1992 |
|
RU2061603C1 |
| Устройство для бесчокерной трелевки деревьев | 1987 |
|
SU1428624A1 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА | 1998 |
|
RU2146441C1 |
| Лесозаготовительная машина | 1981 |
|
SU1020076A1 |
| Лесозаготовительная машина | 1988 |
|
SU1759322A1 |
| Лесозаготовительная машина | 1982 |
|
SU1080791A1 |
| Треловочный трактор | 1990 |
|
SU1782811A1 |
| СОРТИМЕНТОВОЗ | 2021 |
|
RU2757126C2 |
Изобретение относится к лесозаготовительными трелевочным тракторам. Целью изобретения является улучшение эксплуатационных характеристик путем повышения проходимости на поворотах при упоре груза в грунт. Трелевочный трактор содержит самоходное шасси 1 с продольными направляющими 2 для перемещения по ним каретки 3. На каретке 3 установлена поворотная в горизонтальной плоскости платформа 4 с коником, зажимающим пакет древесины 7, опирающейся на грунт. Привод перемещения платформы 4 для ее поворота и движения вдоль шасси осуществляется гидроцилиндрами 5, 6. Гидроцилиндры 5, 6 закреплены корпусом на раме самоходного шасси 1, а штоками - на платформе 4 по обе стороны продольной оси, проходящей через ось вращения платформы. 1 з.п.ф-лы, 3 ил.
Ясно, что а а , т.е. ускорение при разгоне машины по первому варианту (с заявленным устройством) больше ускорения машины по второму варианту Возможно трогание (разгон трактора) путем перемещения коника с грузом назад и при Рц О (отключение гусеничного движителя, плохое сцепление движителя с грунтом - гололед и др.).
II а
.iq(1-K)-f(G+QK) G
Для трактора с грузом в полностью погруженном положении Р. О и трогание машины Р| О невозможно.
В процессе поворота поворачивающий момент М 0,5В (,). Приняв
- PJ
(по
(в сторону завьшения М) Р Р
Р -Рц, получим максимальный двигателю) поворачиваюиу й момент для гусеничной машины .
При втягивании штока одного цилиндра и вьщвижении другого на коник и на машину действует момент от гидроцилиндров Мц, (пара сил Рц,, разност
Формула изобретения
вид А
6 сри.2
В-6
(pus2
| Лесозаготовительная машина | 1980 |
|
SU910481A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
