Изобретение относится к машиностроению и может быть использовано в суперпрецизионных станках при об-- работке особо чистых поверхностей.
Цель изобретения - повьш1ение точности обработки особо чистых поверхностей и расширение диапазона воспринимаемых нагрузок.
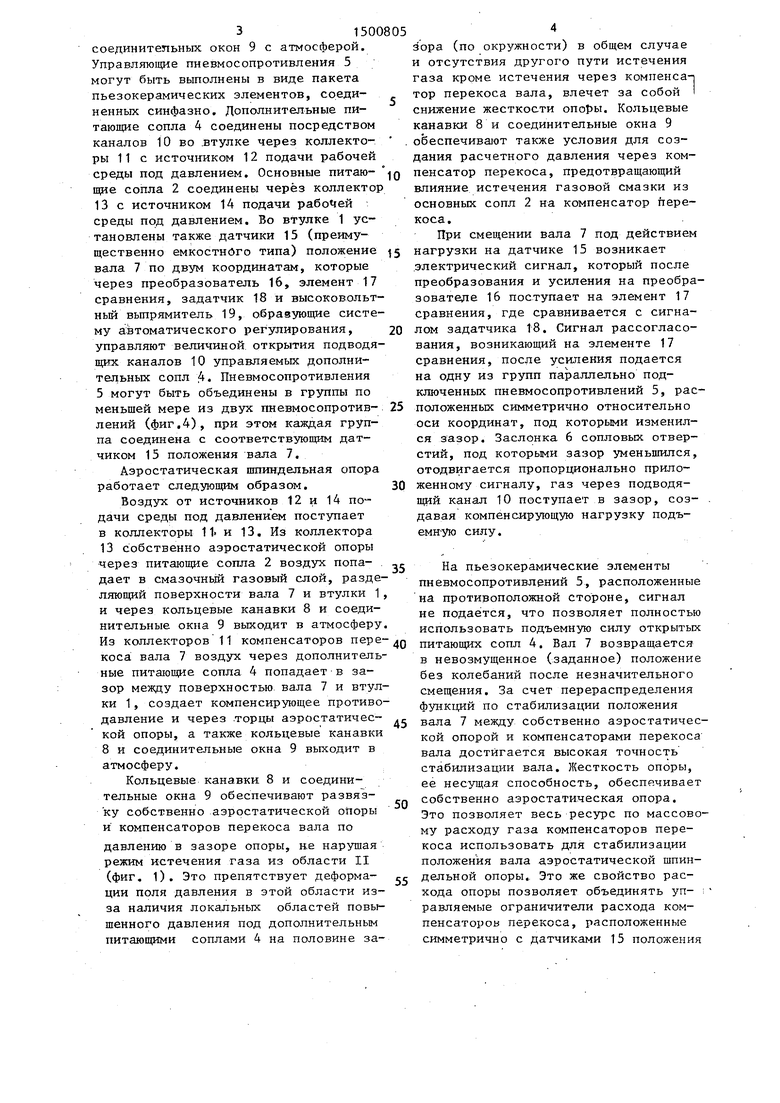
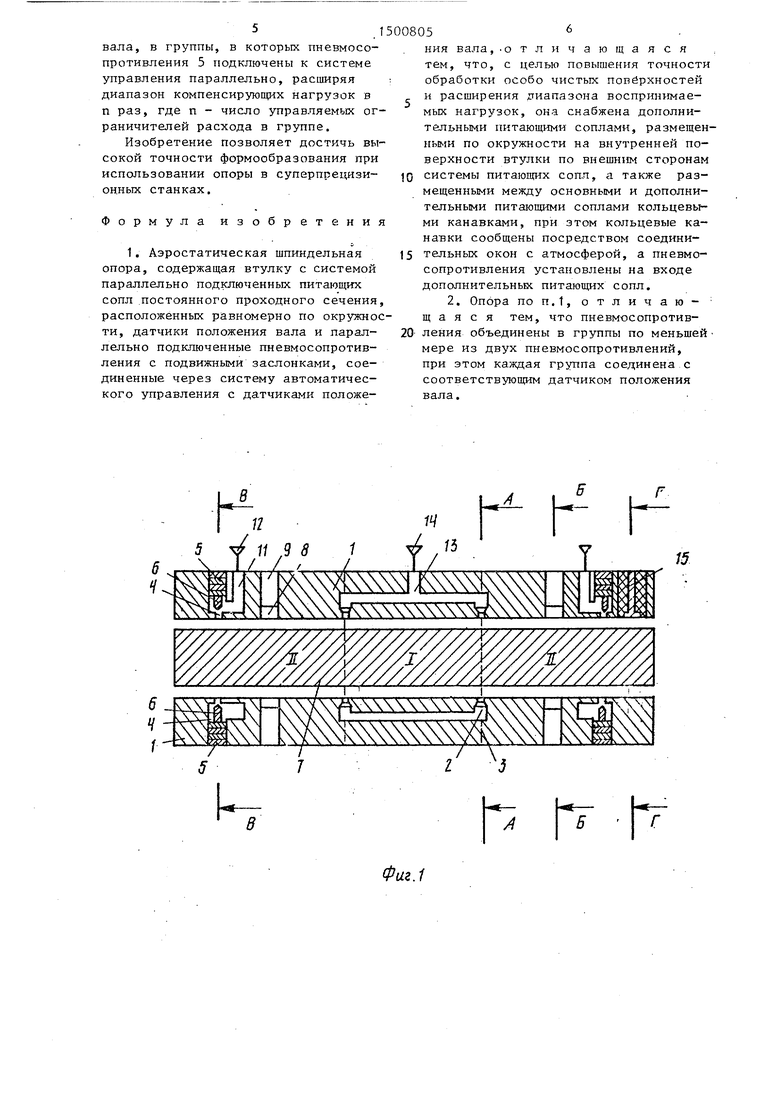
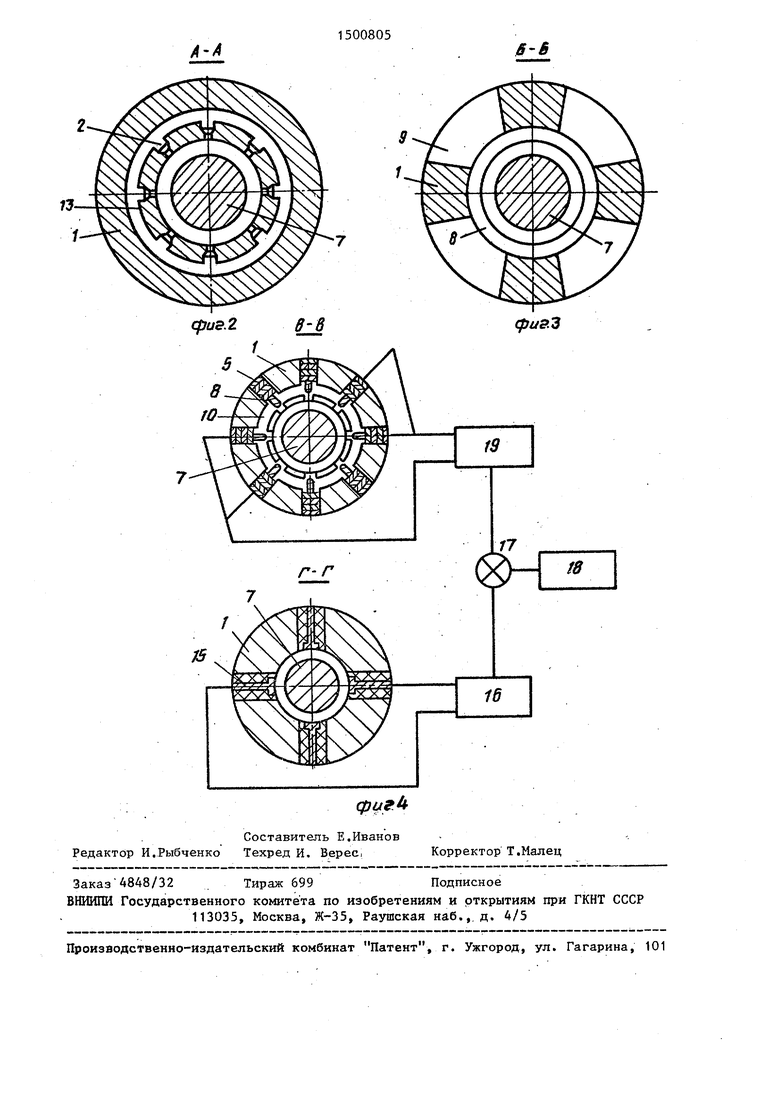
На фиг. 1 схематично представлена аэростатическая шпиндельная опора, общк вид; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - сечение Б-Б на фйг.1; на фиг.4 - сечение Б-В и . Г-Г на фиг. 1 со схемой управления .
Аэростатическая шпиндельная опора содержит втулку 1 с системой параллельно подключенных питающих сопл 2 постоянного проходного сечения, равномерно расположенных по окружности
и образующих две линии 3 наддува. На внутренней поверхности вала по внешним сторонам системы работаюп91Х сопл 2 выполнены дополнительные питающие сопла 4, у входов которых установлены управляемые пневмосопротив- ления 5 с подвижными заслонками 6, образующие с проходными сечениями дополнительных питающих сопл 4 компенсаторы перекоса вала 7 шпинделя. Эти компенсаторы отделены от системы основных питающих сопл 2 кольцевыми канавками 8, сообщенными посредством
сд
о о
СХ5
о ел
31500
соединительных окон 9 с атмосферой. Управляющие пневмосопротивления 5 могут быть выполнены в виде пакета пьезокерамических элементов, соединенных синфазно. Дополнительные питающие сопла 4 соединены посредством каналов 10 во .втулке через коллекто- ры 11 с источником 12 подачи рабочей среды под давлением. Основные питаю- щие сопла 2 соединены через коллектор 13 с источником 14 подачи рабочей среды под давлением. Во втулке 1 установлены также датчики 15 (преимущественно емкостного типа) положение вала 7 по двум координатам, которые через преобразователь 16, элемент 17 сравнения, задатчик 18 и высоковольт- ньй вьшрямнтель 19, образующие систему автоматического регулирования, управляют величиной открытия подводящих каналов 10 управляемых дополнительных сопл 4. Пневмосопротивления 5 могут быть объединены в группы по меньщей мере из двух пневмосопротив- лений (фиг,4), при этом каждая группа соединена с соответствующим датчиком 15 положения вала 7.
Аэростатическая шпиндельная опора работает следующим образом.
Воздух от источников 12 и 14 подачи среды под давлением поступает в коллекторы 11. и 13, Из коллектора 13 собственно аэростатической опоры через питающие сопла 2 воздух попа- дает в смазочный газовый слой, разделяющий поверхности вала 7 и втулки 1 и через кольцевые канавки 8 и соединительные окна 9 выходит в атмосферу Из коллекторов 11 компенсаторов перекоса вала 7 воздух через дополнительные питающие сопла 4 попадает в зазор между поверхностью вала 7 и втулки 1 , создает компенсирующее противодавление и через торцы аэростатичес
кой опоры, а также кольцевые канавки 8 и соединительные окна 9 выходит в атмосферу.
Кольцевые канавки 8 и соединительные окна 9 обеспечивают развязку собственно аэростатической опоры и компенсаторов перекоса вала по давлению в зазоре опоры, не нарушая режим истечения газа из области II (фиг, 1). Это препятствует деформа- ции поля давления в этой области из- за наличия локальных областей повышенного давления под дополнительным питающими соплами 4 на половине за. 5
0
, п
5
0
с
зора (по окружности) в общем случае и отсутствия другого пути истечения газа кроме истечения через компенса- тор перекоса вала, влечет за собой снижение жесткости опоры. Кольцевые канавки 8 и соединительные окна 9 оЬеспечивагот также условия для создания расчетного давления через компенсатор перекоса, предотвращающий влияние истечения газовой смазки из основных сопл 2 на компенсатор перекоса ,
При смещении вала 7 под действием нагрузки на датчике 15 возникает .электрический сигнал, который после преобразования и усиления на преобразователе 16 поступает на элемент 17 сравнения, где сравнивается с сигналом задатчика 18. Сигнал рассогласования, возникающий на элементе 17 сравнения, после усиления подается на одну из групп параллельно подключенных пневмосопротивлений 5, расположенных симметрично относительно оси координат, под которыми изменился зазор. Заслонка 6 сопловых отверстий, под которыми зазор уменьшился, отодвигается пропорционально приложенному сигналу, газ через подводящий канал 10 поступает в зазор, создавая компенсирующую нагрузку подъемную силу.
На пьезокерамические элементы пневмосопротивлений 5, расположенные на противоположной стороне, сигнал не подаётся, что позволяет полностью использовать подъемную силу открытых питающих сопл 4. Вал 7 возвращается в невозмущенное (заданное) положение без колебаний после незначительного смещения. За счет перераспределения функций по стабилизации положения вала 7 между собственно аэростатической опорой и компенсаторами перекоса вала достигается высокая точность стабилизации вала. Жесткость опоры, ее несущая способность, обеспечивает собственно аэростатическая опора. Это позволяет весь ресурс по массовому расходу газа компенсаторов перекоса использовать для стабилизации положения вала аэростатической шпиндельной опоры. Это же свойство расхода опоры позволяет объединять уп- ; равляемые ограничители расхода компенсаторов перекоса, расположенные симметрично с датчиками 15 положения
5
вала, в группы, в которых пневмосо- противления 5 подключены к системе управления параллельно, расширяя диапазон компенсирующих нагрузок в п раз, где п - число управляемых ограничителей расхода в группе.
Изобретение позволяет достичь высокой точности формообразования при использовании опоры в суперпрецизи- онных станках.
Формула изобретения
1. Аэростатическая шпиндельная опора, содержащая втулку с системой параллельно подключенных питающих сопл постоянного проходного сечения, расположенных равномерно по окружности, датчики положения вала и параллельно подключенные пневмосопротив- ления с подвижными заслонками, соединенные через систему автоматического управления с датчиками положе5008056
кия вала,.отличающа
я с я
тем, что, с целью повышения точности обработки особо чистых поверхностей н расширения диапазона воспринимаемых нагрузок, она снабжена дополнительными питающими соплами, размещенными по окружности на внутренней поверхности втулки по внешним сторонам
0 системы питающих сопл, а также размещенными между основными и дополни- тельньми питающими соплами кольцевыми канавками, при этом кольцевые канавки сообщены посредством соедини5 тельных окон с атмосферой, а пневмо- сопротивления установлены на входе дополнительнькс питающих сопл.
2. Опора non.t, отличаю- щ а я с я тем, что пневм-осопротив0 ления объединены в группы по меньшей мере из двух пневмосопротивлений, при этом каждая группа соединена с соответствуюш;им датчиком положения вала.
| название | год | авторы | номер документа |
|---|---|---|---|
| Аэростатическая шпиндельная опора | 1982 |
|
SU1033786A1 |
| АЭРОСТАТИЧЕСКАЯ ШПИНДЕЛЬНАЯ ОПОРА | 1997 |
|
RU2127377C1 |
| Аэростатический подпятник | 1987 |
|
SU1530855A1 |
| Прецизионный газостатический шпиндельный узел | 2021 |
|
RU2771708C1 |
| Двухопорный аэростатический шпиндельный узел | 1975 |
|
SU552140A1 |
| Поворотный стол с газостатической опорой | 2022 |
|
RU2788876C1 |
| ГИДРОСТАТИЧЕСКАЯ ОПОРА | 2012 |
|
RU2508483C2 |
| Шпиндельный узел | 1982 |
|
SU1051340A1 |
| УСТРОЙСТВО ДЛЯ ОПТИЧЕСКОЙ ЗАПИСИ ДИФРАКЦИОННЫХ СТРУКТУР | 2008 |
|
RU2377615C1 |
| Гидростатическая опора | 1991 |
|
SU1784772A1 |
Изобретение относится к машиностроению и может быть использовано в суперпрецизионных станках при обработке особо чистых поверхностей. Цель изобретения - повышение точности обработки особо чистых поверхностей и расширение диапазона воспринимаемых нагрузок. Аэростатическая шпиндельная опора содержит втулку с системой параллельно подключенных питающих сопел, образующих две линии наддува. По внешним сторонам системы питающих сопел выполнены дополнительные питающие сопла, у входа которых установлены управляемые пневмосопротивления, соединенные через систему автоматического управления с датчиками положения вала. Управляемые пневмосопротивления с дополнительными питающими соплами образуют компенсаторы перекоса вала, которые отделены от системы основных питающих сопел кольцевыми канавками, сообщающимися посредством соединительных окон с атмосферой. Для расширения диапазона воспринимаемых нагрузок пневмосопротивления могут быть объединены в группы по меньшей мере из двух пневмосопротивлений, каждая из которых соединена с соответствующим датчиком положения вала. 1 з.п. ф-лы, 4 ил.
h .1
| Аэростатическая шпиндельная опора | 1982 |
|
SU1033786A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
