1
Изобретение относится к области нрецнзионного станкостроения и может быть использовано в качестве привода микроперемещений в координатно-расточных станках, координатно-измерительных машинах, а также в других станках, требующих изменения положения оси шпинделя.
Известны шпиндельные узлы на аэростатических опорах, в которых опоры выполнены в виде втулки с радиально закрепленными в ней соплами для подачи сжатого воздуха в зазор. Сопла связаны общей кольцевой питающей полостью 1.
Наиболее близким к изображению по технической сущности является шпиндельный узел на аэростатических опорах, включающий вал, поддерживаемый двумя воздушными радиальными опорами. Каждая опора представляет собой цилиндрическую втулку, имеющую два ряда питающих сопл, равномерно расположенных по окружности, с общим питанием (давление поддува ко всем питающим соплам подается одинаковым 2.
Недостатком таких конструкций шпиндельного узла на аэростатических опорах является невозможность обеспечения заданного радиального или углового микроперемещений шпинделя в опорах, а также относительно невысокая жесткость таких аэростатических опор.
Целью изобретения является повышение жесткости опор и использование их в качестве привода микроперемещений шпинделя на заданную величину.
Это достигается тем, что каждая опора снабжена измерительными соплами, пара противолежащих сопл выполнена с раздельным каналом питания, выполнена цепь управления питанием сопл, содержащая последовательно соединенные датчик положения с отсчетпым устройством и регулятор перепада давлепия, причем датчик положения связан с измерительными соплами, а регулятор давления - с каналами питания опор.
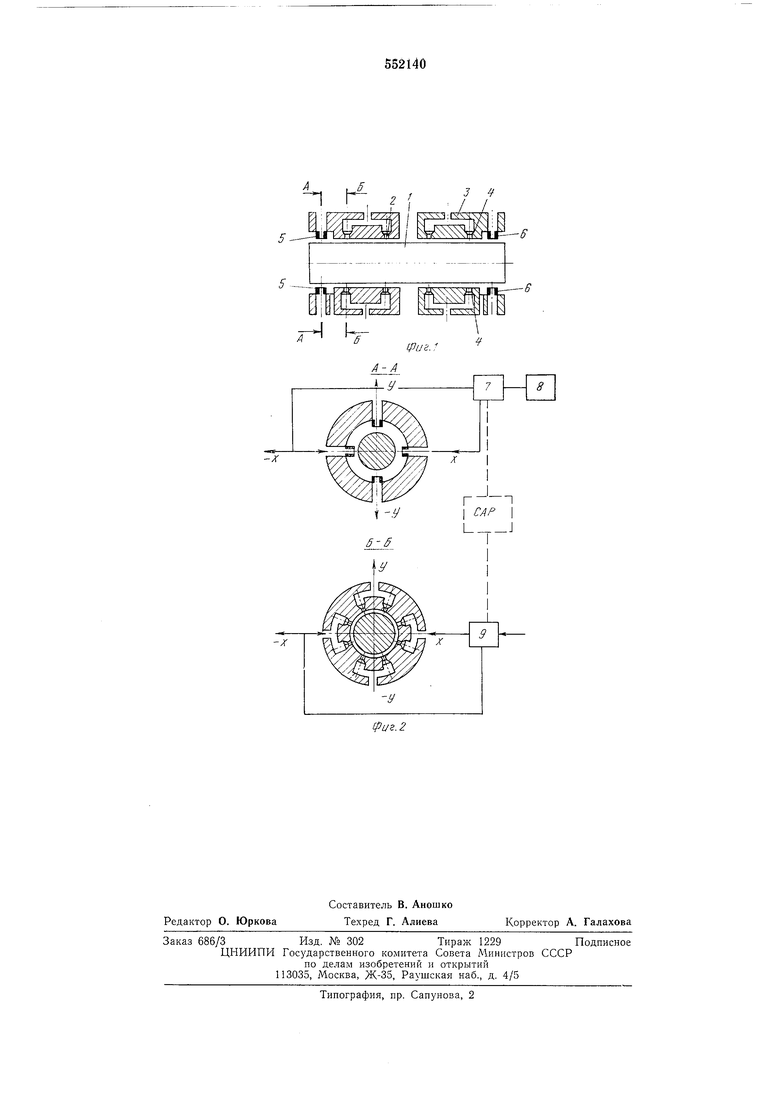
На фит. 1 показан предлагаемый двухопорпый аэростатический шпиндельный узел; на фиг. 2 - разрез но А-А и Б-Б на фиг. 1 и функциональная схема регулирования положением шпинделя в опорах по координате X.
Шпиндельный узел содержит вал 1, две аэростатические радиальные двухрядные опоры 2 и 3 с питающими соплами 4, разнесенными по оси вала, и два ряда измерительных сопл 5 и 6. Иитающне сопла 4 сгруппированы по осям X и Y так, что сопла, противолежащие д.рут другу, имеют раздельпое питание, регулируемое по величине.
Система регулирования положения оси шпинделя по .координате х включает для каждой опоры датчик 7 положения оси, связанный с отсчетным устройством 8 и измерительными соплами 6 или 5, а также регулятор переиада давлений 9, выходы которого связаны с противолежащими питающими соплами 4 одной из опор.
Работает предлагаемый аэростатический щпиндельный узел следующим образом (на примере регулирования положения оси шпинделя по координате х).
Для перемещения оси вала на заданную величину необходимо с помощью регулятора перепада давлений 9 изменить давление питания, подаваемое к противоположным питающим соплам 4, так, что давление, подводимое к питающему соплу, в сторону которого необходимо сместить ось вала, уменьщается, а в противоположную - увеличивается. Под действием возникшего перепада давлений ось щпинделя перемещается. Величина этого перемещения определяется с помощью датчика 7 положения оси шпинделя по показанию отсчетного устройства 8, при этом для получения требуемой величины радиального перемещения необходимо, чтобы векторы этих смещений на опорах 2 и 3 совпадали как по величине, так и по знаку. Угловое смещение оси шпинделя достигается равной величиной смещений на опорах 2 и 3.
Управление положением оси может производиться вручную (по показанию отсчетного устройства датчика) или с помощью системы автоматического регулирования (САР).
В режиме стабилизации положения оси щпинделя 1 (при использовании САР) при воздействии на него внешних нагрузок возникает перемещение вала в аэростатической опоре, которое измеряется датчиком положения 7 и регистрируется на отсчетном устройстве 8. Затем это перемещение датчиком положепия 7 преобразуется в управляющий сигнал, который воздействует на регулятор перепада давлений 9 так, что давление, подводимое к питающим соплам, увеличивается со стороны меньшего зазора опоры и уменьшается с противоположной стороны, создавая дополнительный перепад давлений, который, воздействуя на шпиндель 1, возвращает последний в исходное положение. Применение такого аэростатического шпиндельного узла позволяет иметь повышенную жесткость и несущую способность, а следовательно, и повысить точность обработки деталей за счет уменьшения величины упругих
деформаций щпинделя, использовать аэростатические опоры в качестве привода перемещений, кроме основного их назначения, повысить точность задания координат оси щпинделя, а также упростить процесс выставки соосности аэростатических шпиндельных узлов в агрегатных прецизионных станках.
Формула изобретения
Двухопорный аэростатический щпиндельный узел, каждая из опор которого выполнена в виде втулки с двумя рядами питающих сопл, равномерно распределенных по окружности и связанных с каналами питания,.
отличающийся тем, что, с целью повышения жесткости опор и использования их в качестве привода микроперемешений шпинделя, каждая опора снабжена измерительными соплами, каждая пара противолежащих
питающих сопл выполнена с раздельным каналом питания, цепь управления питанием питающих сопл содержит последовательно соединенные датчик положения с отсчетным устройством и регулятор перепада давлений,
причем датчик положения связан с измерительными соплами, а регулятор давления - с каналами питания опор.
Источники информации, принятые во внимание при экспертизе
1. Патент ФРГ № 1 252.010, кл. 49а, 17/00, 1970.
2. Шейнберг С. А. и др. Опоры скольжения с газовой смазкой. М., Мащиностроение, 1969, с. 269.
| название | год | авторы | номер документа |
|---|---|---|---|
| Аэростатическая опора шпинделя | 1978 |
|
SU774807A1 |
| Аэростатическая шпиндельная опора | 1982 |
|
SU1033786A1 |
| Прецизионный газостатический шпиндельный узел | 2021 |
|
RU2771708C1 |
| Устройство для измерения траектории перемещения оси вращения шпинделя | 1985 |
|
SU1301646A1 |
| Аэростатическая шпиндельная опора | 1987 |
|
SU1500805A1 |
| АЭРОСТАТИЧЕСКАЯ ШПИНДЕЛЬНАЯ ОПОРА | 1997 |
|
RU2127377C1 |
| Шпиндельный узел | 1982 |
|
SU1051340A1 |
| Поворотный стол с газостатической опорой | 2022 |
|
RU2788876C1 |
| Шпиндельный узел | 1979 |
|
SU848146A1 |
| ПРИБОР ДЛЯ ТОЧНОЙ УСТАНОВКИ И КОНТРОЛЯ РАЗНОВЫСОКИХ ШПИНДЕЛЬНЫХ ГОЛОВОК | 1972 |
|
SU435901A1 |