Изобретение относится к машиностроению и может быть использовано, например, в металлорежущих станках.
Известна аэростатическая шпиндельная опора по авторскому свидетельству N 1033786, F 16 C 32/06, опубликованному N 29, 83 г. Она содержит корпус, втулку с системой параллельно подключенных питающих сопел постоянного проходящего сечения, расположенных равномерно по окружности втулки, регулируемые пневмосопротивления по окружности на части питающих сопел. Датчики положения вала и система автоматического управления величиной пневмосопротивлений дает возможность регулировать величину давления в секторах несущего слоя газовой смазки.
Недостаток данной опоры - возможность достижения максимально возможной несущей способности и жесткости только в случае, если плоскость радиального смещения шпинделя совпадает с продольной осью одного из питающих сопел.
Наиболее близким к предлагаемому изобретению является опора скольжения по авторскому свидетельству N 615280, F 16 C 32/06, опубликованного N 26, 78 г. Прототип состоит из корпуса, поворотной втулки с закрепленным в ней нерегулируемым питателем и устройства для возвратно-вращательного перемещения втулки.
Данная опора может использоваться для реверсивных валов и осей для двух заранее заданных значений частоты и направления вращения вала.
В ходе работы нельзя провести адаптацию опоры к изменению характеристик внешней нагрузки на вал или ось опоры.
Отсутствие возможности управлять давлением смазки в различных секторах несущего слоя газовой смазки с помощью регулируемых пневмосопротивлений снижает несущую способность, жесткость и динамические характеристики опоры скольжения. Кроме того, данная опора имеет только один, сравнительно небольшой, сектор возможных угловых положений плоскости радиального смещения, который можно совместить с продольной осью питателя.
Цель изобретения - достижение максимально возможной несущей способности, максимальной жесткости и высоких динамических характеристик аэростатической шпиндельной опоры независимо от изменений углового положения плоскости радиального смещения оси шпинделя, возникающего при изменении характеристик внешней нагрузки.
Поставленная цель достигается тем, что аэростатическая шпиндельная опора, содержащая корпус, поворотную втулку, а также неподвижную втулку между корпусом и поворотной втулкой, регулируемые пневмосопротивления и датчики положения шпинделя, по информации с которых система автоматического управления выдает управляющие сигналы на привод поворотной втулки и управляющие сигналы на регулируемые пневмосопротивления.
Кроме того, на внешней поверхности поворотной втулки по окружности выполнены секторные канавки для подвода газовой смазки от регулируемых пневмосопротивлений к питателям, расположеннымх в центре каждого сектора поворотной втулки, независимо от углового положения этой втулки относительно корпуса.
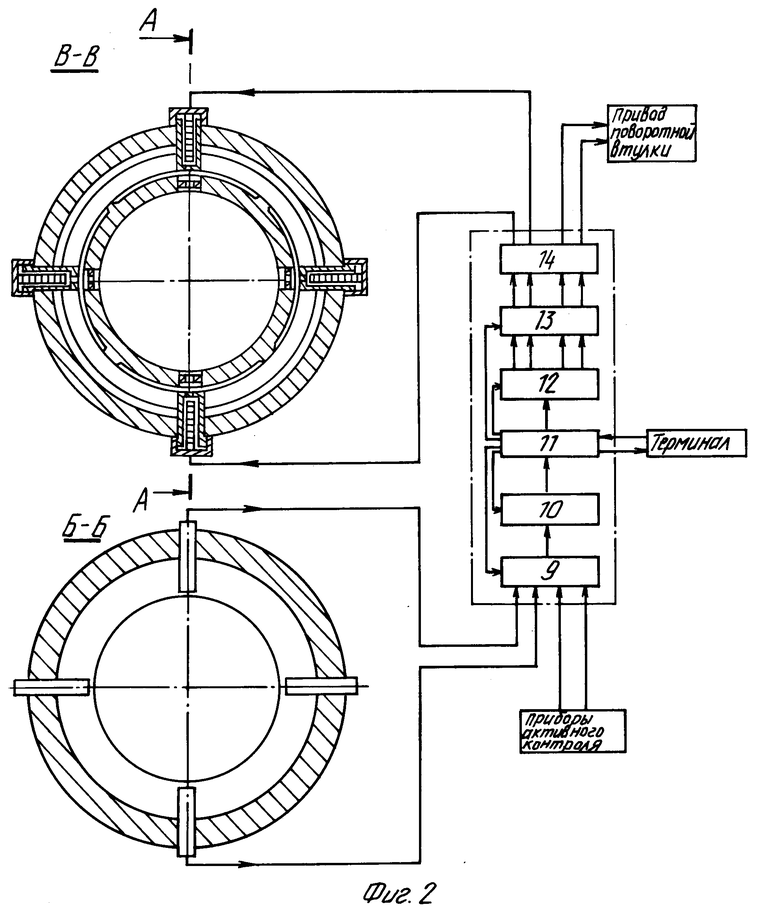
На фиг. 1 изображена схема аэродинамической шпиндельной опоры (разрез А-А на фиг. 2).
На фиг. 2 - разрез В-В и разрез Б-Б.
Опора состоит из корпуса 1, неподвижной втулки 2. Расточки на внутренней поверхности корпуса образуют между этими деталями два общих коллектора. Равномерно по окружности, по радиальным направлениям, расположены регулируемые пневмосопротивления (пьезо-электрический дроссель) 3. Сопла регулируемых пневмосопротивлений выходят в отдельные друг от друга секторные канавки 4, выполненные по окружности поворотной втулки 5. Через центр каждого сектора поворотной втулки просверлено отверстие, где расположен нерегулируемый питатель (жиклер) 6.
Для определения положения оси шпинделя 8 установлены датчики 7. Привод поворота втулки состоит из зубчатой передачи и электромотора с редуктором.
Система автоматического управления состоит из коммутатора 9, аналого-цифрового преобразователя 10, программируемого логического блока 11, демультиплексора 12, цифроаналоговых преобразователей 13 и блока усиления 14.
Аэростатическая шпиндельная опора работает следующим образом.
Воздух от источника питания попадает в общий коллектор между корпусом 1 и неподвижной втулкой 2, откуда через регулируемые пневмосопротивления 3 попадает в секторные канавки 4 на внешней поверхности поворотной втулки 5. В центре каждого сектора поворотной втулки находится жиклер 6, через который газовая смазка поступает в несущий слой. Вращение поворотной втулки в пределах угла сектора обеспечивает совмещение плоскости радиального смещения оси шпинделя с продольной осью одного из жиклеров.
Датчики положения 7 оси шпинделя 8 выдают аналоговые сигналы на входы коммутатора 9, сюда же поступают сигналы от приборов активного контроля. Аналого-цифровой преобразователь 10 передает сигнал в цифровой форме в программируемый логический блок 11. Этот блок выдает через демультиплексор 12 цифровые сигналы управления на цифроаналоговые преобразователи 13. Аналоговые сигналы управления через блок усиления 14 поступают на привод поворотной втулки и регулируемые пневмосопротивления 13.
Таким образом поставленная цель достигается, так как система автоматического управления по информации с датчиков положения будет постоянно стремиться совместить продольную ось одного из жиклеров с плоскостью радиального смещения оси шпинделя и, управляя регулируемыми пневмосопротивлениями, устранить эксцентриситет.
| название | год | авторы | номер документа |
|---|---|---|---|
| Аэростатическая шпиндельная опора | 1982 |
|
SU1033786A1 |
| Аэростатическая шпиндельная опора | 1987 |
|
SU1500805A1 |
| Двухопорный аэростатический шпиндельный узел | 1975 |
|
SU552140A1 |
| Прецизионный газостатический шпиндельный узел | 2021 |
|
RU2771708C1 |
| Стенд для испытания интеллектуальной системы адаптивного управления процессом резания на металлорежущих станках со шпиндельным узлом с активными магнитными подшипниками | 2015 |
|
RU2690625C2 |
| ГИДРОСТАТИЧЕСКАЯ ОПОРА | 2012 |
|
RU2508483C2 |
| ГИДРОСТАТИЧЕСКИЙ ПОДШИПНИК | 2017 |
|
RU2654453C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАДИАЛЬНОЙ ДИНАМИЧЕСКОЙ ЖЕСТКОСТИ ШПИНДЕЛЬНЫХ УЗЛОВ МЕТАЛЛОРЕЖУЩИХ СТАНКОВ | 1995 |
|
RU2094177C1 |
| Поворотный стол с газостатической опорой | 2022 |
|
RU2788876C1 |
| Пневматическое уплотнение шпинделя | 1985 |
|
SU1295116A1 |
Изобретение относится к машиностроению и может быть использовано, например, в металлорежущих станках. Данная опора может использоваться для реверсивных валов и осей для двух заранее заданных значений частоты и направления вращения вала. Опора состоит из корпуса, неподвижной втулки. Расточки на внутренней поверхности корпуса образуют между этими деталями два общих коллектора. Равномерно по окружности по радиальным направлениям расположены регулирумые пневмосопротивления ( пьезоэлектрический дроссель). Сопла регулируемых пневмосопротивлений выходят в отделенные одна от другой секторные канавки, выполненные по окружности поворотной втулки. Через центр каждого сектора поворотной втулки просверлено отверстие, где расположен нерегулирующий питатель ( жиклер). Для определения положения оси шпинделя установлены датчики. Привод поворота втулки состоит из зубчатой передачи и электромотора с редуктором. Система автоматического управления состоит из коммутатора, аналого-цифрового преобразователя, программируемого логического блока, демультиплексора, цифроаналоговых преобразователей и блока усиления. Технический результат- достижение максимально возможной несущей способности максимальной жесткости и высоких динамических характеристик. 1 з.п. ф-лы, 2 ил.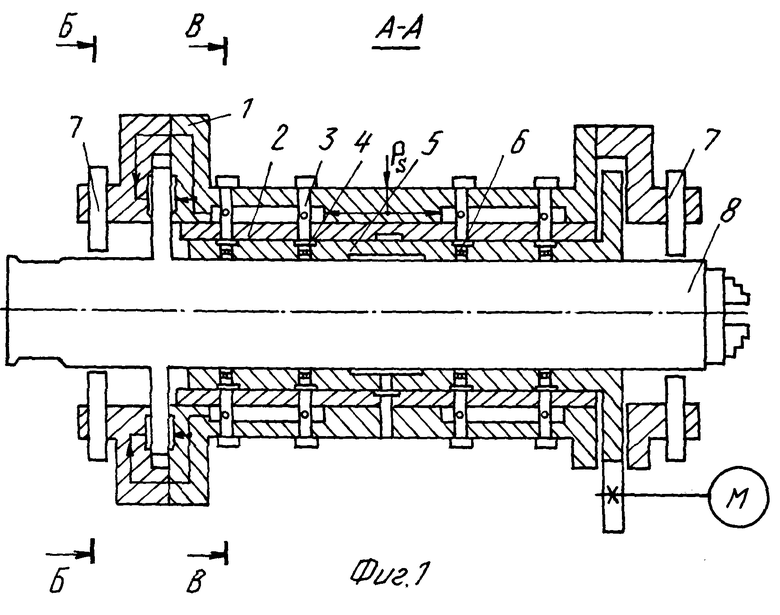
| Опора скольжения | 1975 |
|
SU615280A1 |
| Аэростатическая шпиндельная опора | 1982 |
|
SU1033786A1 |
| ГИДРОСТАТИЧЕСКИЙ ПОДШИПНИК | 0 |
|
SU176756A1 |
| Гидростатическая опора | 1975 |
|
SU603787A1 |
| СОЛИ [3-МЕТИЛ-1-Н-ПРОПИЛ-7-(1,1-ДИОКСОТИЕТАНИЛ-3)КСАНТИНИЛ-8-ТИО]УКСУСНОЙ КИСЛОТЫ, ПРОЯВЛЯЮЩИЕ ПРОАГРЕГАНТНУЮ АКТИВНОСТЬ | 2011 |
|
RU2459825C1 |
| US 3053589, 1962 | |||
| Аэростатическая шпиндельная опора | 1987 |
|
SU1500805A1 |
