сл
ЭО
Зг(Уг}
ЗП/УГГ)
31501018
делителя с тремя входами 19, 20 и 21, двумя выходами 10 и 22, с камерой 23 управления и с пружиной 25 подпора. В каждой ячейке камера 23 распредели- с теля сообщена с соответствуюп им командным каналом 4. Первый вход 19 распределителя соединен с атмосферой, второй вход 20 - с вторым вЬтодом 22 предыдущей ячейки, а третий вход 21 tO и первый выход 10 - соответственно с
выходом 8 и с информационным входой 9 элемента 7 задержки на такт ячейки, Второй выход 22 распределителя по- следней ячейки подключен к в.торому входу 14 распределителя 5, его первый вход сообщен с каналом i питания выход - с вторым входом 20 распределителя первой ячейки, а камера 17 управления соединена через дроссель 18 с каналом 2. 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматическое обегающее устройство | 1982 |
|
SU1012227A1 |
| Система программного управления для пневмогидравлических приводов | 1988 |
|
SU1657773A2 |
| Пневматическое устройство сигнализации | 1989 |
|
SU1615765A1 |
| Устройство для дистанционного программного управления электроприводными механизмами | 1986 |
|
SU1372279A1 |
| Пневматическое устройство управления | 1983 |
|
SU1128223A1 |
| ПНЕВМАТИЧЕСКОЕ ОБЕГАЮЩЕЕ УСТРОЙСТВО | 1970 |
|
SU275516A1 |
| Устройство для воспроизведения мно-гОКАНАльНОй МАгНиТНОй зАпиСи | 1979 |
|
SU836662A1 |
| ПНЕВМАТИЧЕСКИЙ ДВУХКАНАЛЬНЫЙ ОПТИМИЗАТОР | 1972 |
|
SU419849A1 |
| Устройство для автоматического поиска дефектов в логических блоках | 1988 |
|
SU1681304A1 |
| Устройство для умножения на коэффициенты | 1985 |
|
SU1305663A1 |
Изобретение может быть использовано в системах управления. Цель изобретения - упрощение конструкции устройства. Пневматическое обегающее устройство содержит последовательно соединенные ячейки, в каждой из которых установлены логический элемент 11 и элемент 7 задержки на такт, сообщенный своим выходом с соответствующим выходным каналом 3 устройства, а управляющим входом 12 - с каналом 2 тактовых импульсов. Узел управления выполнен в виде распределителя 5 с кнопкой 6 ручного управления, с камерой 17 управления, с двумя входами 13 и 14 и одним выходом 15, а логический элемент 11 - в виде распределителя с тремя входами 19, 20 и 21, двумя выходами 10 и 22, с камерой 23 управления и с пружиной 25 подпора. В каждой ячейке камера 23 распределителя сообщена с соответствующим командным каналом 4. Первый вход 19 распределителя соединен с атмосферой, второй вход 20 - с вторым выходом 22 предыдущей ячейки,а третий вход 21 и первый выход 10 - соответственно с выходом 8 и информационным входом 9 элемента 7 задержки на такт ячейки. Второй выход 22 распределителя последней ячейки подключен к второму входу 14 распределителя 5, его первый вход сообщен с каналом 1 питания, выход - с вторым входом 20 распределителя первой ячейки, а камера 17 управления соединена через дроссель 18 с каналом 2. 1 ил.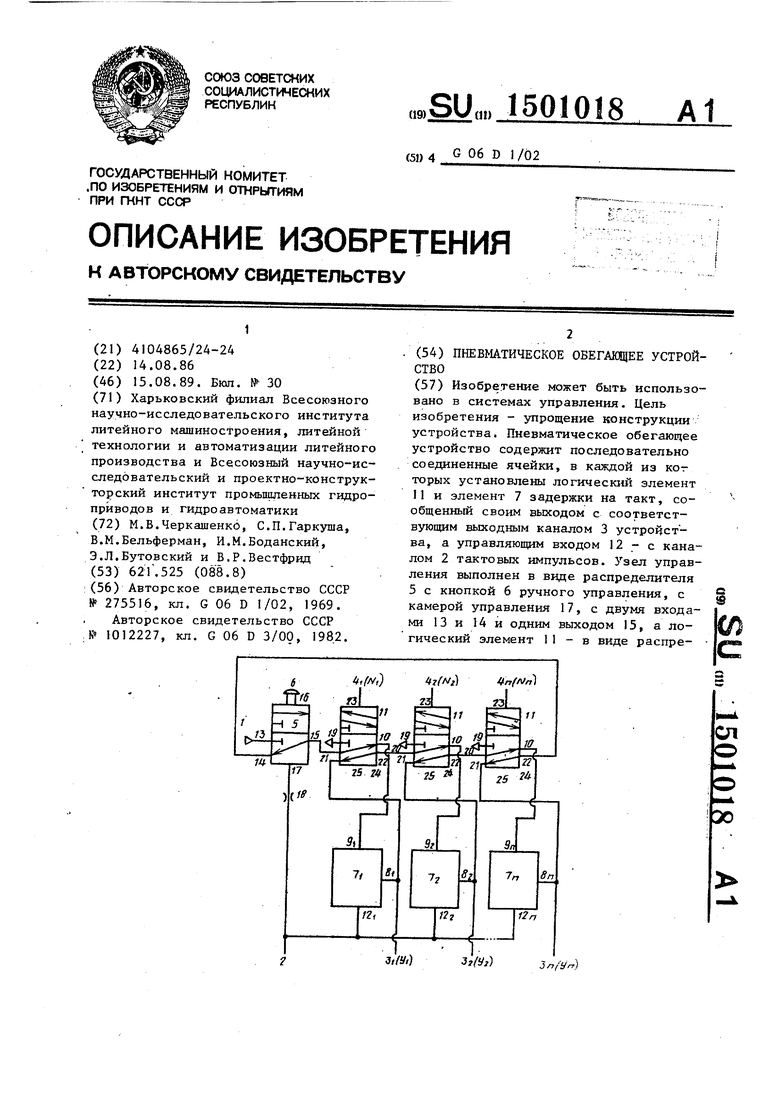
Изобретение относится к устройствам пневмоавтоматиЛи и может быть использовано в системах управления.
Целью изобретения является упроще- ние конструкции устройства.
На чертеже приведена схема обегающего устройства.
Оно содержит канал пита.ния 1 , канал 2 тактовых сигналов, выходные каналы 3, командные каналы 4. Узел управления выполнен в виде трехлинейного распределителя 5 с кнопкой ручного управления 6. В обегающее устройство входят последовательно соединенные ячейки, в каждой из которьк установлен элемент 7 задержки на такт,сообщенный своим выходом 8 с соответствующим выходным каналом 3. Информационный вход 9 элемента 8 соединен с первым выходом 10 логического элемента 11, выполненного в виде пятилинейного распределителя, а управляющий вход 12 - с каналом 2.
Распределитель 5 имеет первый 13 и второй 14 входы, выход 15, камеры 16 и 17 управления. Камера -17 через дроссель 18 соединена с каналом 2.
Логический элемент-распределитель 11 имеет первый 19, второй 20 и тре- тий 21 входы, первый-10 и второй 22 выходы, прямую камеру 23 управления и инверсную камеру 24 управления, в которой установлена пружина 25 подпора.
Первый вход 19 соединен с атмосферой, второй вход 20 - с вторым выходом 22 распределителя предыдущей ячейки, третий вход 21 - с выходом 8 элемента 7. Выход 22 распределителя 11 последней ячейки сообщен с вторым входом 14 распределителя 5, связанного своим первым входом 13 с каналом питания 1, а своим выходом 15 с вторым входом 20 распределителя 11 первой ячейки.
Камера 23 управления соединена с соответствующими командными каналами 4 .
Пневматическое обегающее устройство работает следующим образом.
Пуск устройства в работу осуществляется кратковременным нажатием кнопки 6. При этом, давление питания через вход 13, выход 15 распределителя 5, йход 20 и выход 10 распределителя I1 (при отсутствии сигнала 4(Кр в канале 23 управления) поступает на вход 9 элемента 7. При появлении первого тактового импульса в канале 2 дискретный сигнал запоминается в первой ячейке в элементе 7, проходит на его выход 8, поступает в выходной канал 3 (1 О устройства. Через небольшую задержку, вызванную дросселем 18 (установленным для того, чтобы успел сработать элемент задержки 7), распределитель 5 устанавливается в исходное положение. Выходной сигнал первой ячейки с выхода 8 через вход 21 и выход 22 распределителя 11 первой ячейки поступает на вход 20 распределителя 11 второй ячейки и (при отсутствии сигнал 4(N,j)) через выход 10 на вход 9 элемента задержки 7 второй ячейки, сохраняясь в выходном канале 3, (Y,l) При подаче следуклцего тактового импульса X I дискретный сигнал запоминается на элементе задержки 7 второй ячейки, поступает на выход 8, в выходной канал 3 (Y, 1) и снимается с выхода 3), (Y, 0). Аналогично происходит прохождение дискретного сигнала через последующие ячейки. При появлении в конце цикла обегания дискретного сигнала в выходном кана515
ле 3 f, () через вход 21 и выход 2 распределителя 11 последней ячейки сигнал поступает на Ьход 14 и выход 15 распределителя 5 и цикл повторяется. При подаче сигнала 4 (N,..., N) в камеру управления соответствующего распределителя 11 выходной сигнал, соответствующий данной ячейке, исключается из цикла обегания. Например, при подаче сигнала N 1 распределитель I1 переключается, при этом сигнал с выхода I5 распределителя 5 через вход 20 и выход 22 распределителя 11 первой ячейки посту- пает на вход 20 и вькод 10 распределителя I1 второй ячейки, вход 9 элемента задержки 7 первой ячейки череэ выход 10 и вход 19 распределителя 11 этой ячейки сообщается с атмосферой, а выход 8 элемента задержки 7 первой ячейки поступает на вход 21 распределителя 11 этой ячейки, KOTopbui находится в запертом положении (), т..е. в этом случае первая ячейка не работает.
Формула изобретения
Пневматическое обегающее устройство, содержащее узел управления, Командные каналы, канал питания и последовательно соединенные ячейки, в каждой из которых установлен логи86
чес кий элемент и элемент задержк ма такт сообп(енный вькодом с соотвотст- вующим выходным каналом устройства, а управляющим входом - с каналом тактовых импульсов, отличающееся тем, что, с целью упрощения конструкции, устройство снабжено дросселем, узел управления гмполнен в виде распределителя с кнопкой ручного управления, с камерой управле- ния, с двумя входами и одним выходом а логический элемент выполнен в виде распределителя с тремя входами, двумя выходами, с камерой управления и с пружиной подпора, причем в каждой ячейке камера управления распределителя сообщена с соответствующим командным каналом, первый вход распределителя соединен с атмосферой, второй вход - с вторым выходом предьщу- щей ячейки, а третий вход и первьй выход соответственно - с выходом и с информационным входом элемента задержки на такт ячейки, второй выход распределителя последней ячейки подключен к второму входу распределителя узла управления, его первый вход сообщен с каналом питания, выход - с вторым входом распределителя первой ячейки, а камера управления соединена через дроссель с каналом тактовых импульсов.
| ПНЕВМАТИЧЕСКОЕ ОБЕГАЮЩЕЕ УСТРОЙСТВО | 0 |
|
SU275516A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Пневматическое обегающее устройство | 1982 |
|
SU1012227A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
