1
(61) 1521937 (21)4487326/29 (22) 28.09.88 (46)23.06.91. Бюл. №23
(71)Всесоюзный научно-исследовательский и проектно-конструкторский институт промышленных гидроприводов и гидроавтоматики
(72)М.В.Черкашенко, В.М.Бельферман, В.О.Качиони, A.M.Новик, В.М.Викутан, Б.К.Комков и Д.С.Вайсблат
(53)62-521 (088.8)
(56)Авторское свидетельство СССР № 1521937, кл. F 15 В 9/03, 1987.
(54) СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ
(57)Изобретение м.б. использовано в конструкциях испытательных стендов. Цель изобретения - расширение диапазона применения и повышение надежности системы программного управления для пневмогид- равлических приводов. Число каждого элемента И, ИЛИ и элементов ЗАПРЕТ равно числу столбцов программируемой матрицы И входного блока и выполнено с равными этому числу количествами реле времени и настроечных входов. Каждый выход.программируемой матрицы И входного блока соединен с одним из входов одного дополнительного элемента И и одного элемента ЗАПРЕТ, другие входы последних соединены с одним дополнительным настроечным входом. Выходы элементов ЗАПРЕТ непосредственно, выходы элементов И через реле времени соединены с входами дополнительных элементов ИЛИ, выходы к-рых подключены к входам программируемой матрицы ИЛИ. 1 ил.
NW
Ё
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневмогидросистема | 1985 |
|
SU1348569A1 |
| Рыборазделочная машина | 1973 |
|
SU506368A1 |
| Система программного управления для пневмогидравлических приводов | 1987 |
|
SU1521937A1 |
| Адаптивное телеизмерительное устройство | 1975 |
|
SU608186A1 |
| НЕЙРОПРОЦЕССОР, УСТРОЙСТВО ДЛЯ ВЫЧИСЛЕНИЯ ФУНКЦИЙ НАСЫЩЕНИЯ, ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО И СУММАТОР | 1998 |
|
RU2131145C1 |
| Устройство умножения булевых матриц | 1980 |
|
SU959063A1 |
| Устройство для контроля правильности включения канала управления технологическим оборудованием | 1981 |
|
SU1107108A1 |
| Трехкаскадная коммутирующая система | 1984 |
|
SU1226481A1 |
| ТРЕХКАСКАДНАЯ КОММУТАЦИОННАЯ СИСТЕМА | 2007 |
|
RU2359313C2 |
| Коммутационное устройство | 1985 |
|
SU1251095A1 |
Изобретение относится к гидропневмоавтоматике, может быть использовано в конструкциях испытательных стендов и является усовершенствованием изобретения поавт.св. Ns 1521937.
Целью изобретения является расширение диапазона применения и повышение надежности.
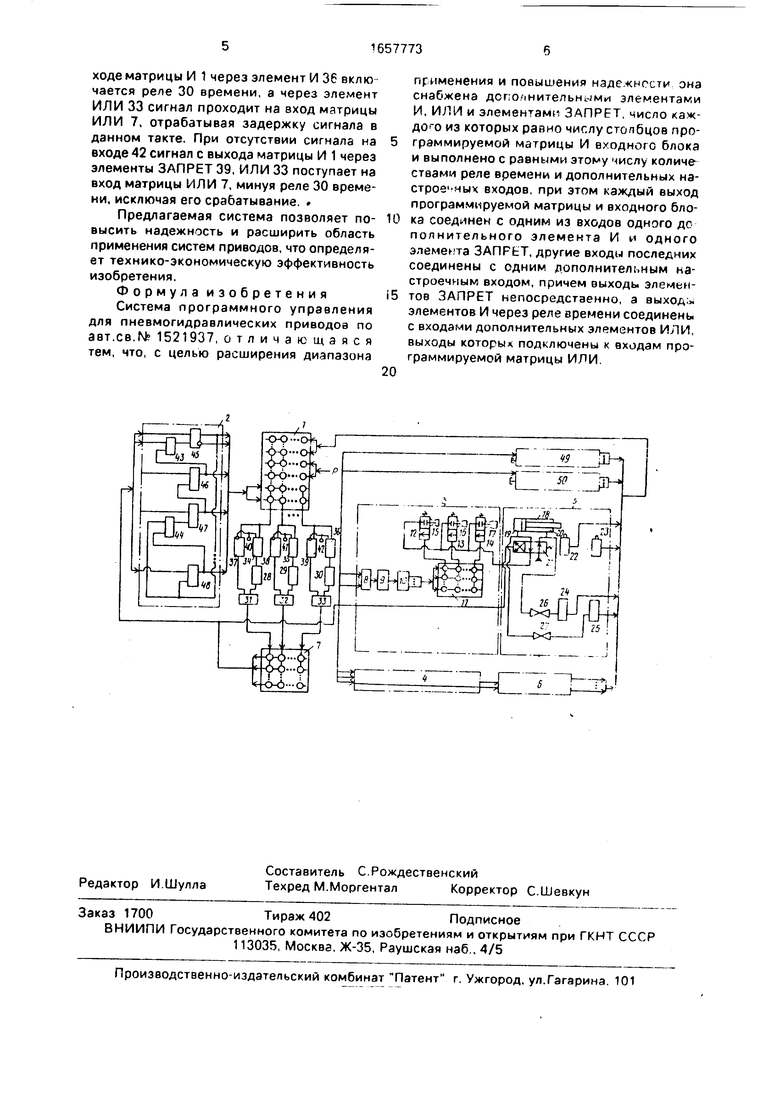
На чертеже изображена схема системы программного управления.
Система программного управления для гидравлических(пневматических) приводов содержит входной блок 1 в виде программируемой матрицы И, регистр 2, блоки 3 и 4 управления, приводные блоки 5 и 6 и программируемую матрицу ИЛИ 7.
Блок 3 управления включает многовхо- довой элемент ИЛИ 8 и последовательно
установленные на его выходе генератор 9 импульсов, обегающее устройство 10, дополнительную программируемую матрицу И 11 и двухлинейные распределители 12 - 14, на выходах последней соединенные со сливом через дроссели 157 17.
Приводной блок 5 включает исполнительный двигатель, например цилиндр 18, к полостям 19 и 20 которого подключен четырехлинейный распределитель 21. конечные выключатели 22 и 23 в крайних положениях цилиндра 18, клапаны 24 и 25 последовательности и вентили 26 и 27. Выходы клапанов 24 и 25 и конечных выключателей 22 и 23 подключены к входам блока 1.
Реле 28 - 30 времени, количество которых равно количеству столбцов матрицы И входного блока 1, установлены между доО
ел
XI
XI
х| GJ
ю
полнительными элементами ИЛИ 31 - 33, И 34 - 36 и ЗАПРЕТ 37 - 39, число элементов каждого типа равно числу столбцов матрицы И блока 1. Каждый ее выход соединен с одним из входов элементов И 34 - 36 и ЗАПРЕТ 37 - 39, другой вход дополнительных элементов И 34 - 36 и инверсные входы элементов ЗАПРЕТ 37 - 39 соединены между собой и с дополнительными настроечными входами 40 - 42, выходы элементов ЗАПРЕТ 37 - 39 непосредственно, а выходы дополнительных элементов И 34 - 36 через реле 28 - 30 времени раздельно соединены с входами дополнительных элементов ИЛИ 31 - 33, выходы каждого из последних раздельно соединены с входами матрицы ИЛИ 7. Матрица ИЛИ 7 подключена выходами к регистру 2 и управляющему входу распределителя 21, соединенного со сливом через распределители 12 - 14, а полости 19 и 20 связаны через вентили 26 и 27 с клапанами 24 и 25.
Регистр 2 выполнен с первым и вторым логическими элементами ИЛИ 43 и 44 и по меньшей мере четырьмя триггерами 45 - 48, выходы которых соединены с входами блока 1. Элементы ИЛИ 43 и 44 соединены выходами с отключающими входами триггеров 45 и 47 соответственно, одним входом - с выходами триггеров 46 и 48, другой вход элемента ИЛИ 43 подключен к выходу матрицы ИЛИ 7, а элемента ИЛИ 44 - к выходу триггера 45.
Блок 1 соединен с внешними входными устройствами (не показаны), от которых поступают сигналы Р. Блок 4 управления и приводной блок 6 выполнены аналогично блокам 3 и 5 соответственно. Кроме того, система может содержать дополнительные приводные блоки 49 и 50, аналогичные блоку 5, непосредственно соединенные с выходом матрицы ИЛИ 7 (без блоков управления).
Система программного управления для гидравлических(пневматических) приводов работает следующим образом,
Контроль отработки исполнительным двигателем 18 сигналов по положению осуществляется конечными выключателями 22 и 23, по времени - после включения одного из реле 28 - 30 времени и наличию сигнала с выхода соответствующего конечного выключателя 22, по давлению - после открытия вентиля 26 и снятия питания с соответствующего конечного выключателя.
Управление по циклу осуществляется следующим образом. Сигналы от внешних устройств и устройств, контролирующих движение исполнительного двигателя 18, поступают на входы блока 1, в котором формируются конъюнкции, выполняющие в
соответствии с программой функции, отражающие условия переходов системы. Сигналы с выходов входного блока 1 поступают на входы матрицы ИЛИ 7, где формируются
дизъюнкции сформированных в блоке 1 конъюнкций, указывающие на многократное срабатывание одних и тех же исполнительных двигателей в цикле. Сигналы с выхода матрицы ИЛИ 7 поступают в регистр
О 2, в котором каждый предыдущий триггер 45 и 47 отключается сигналом с выхода последующего триггера 46 и 48 и включается сигналами с выходов матрицы ИЛИ 7.
Сигналы с выходов регистра 2 поступа5 ют на соответствующие входы входного блока 1. Регистр 2 в совокупности с матрицами 1 и 7 формируют очередной цикл работы исполнительных двигателей, Наличие элементов ИЛИ 43 и 44 с третьей
0 до предпоследней ячейки регистра 2 позволяет реализовать цикл с любым числом внутренних состояний системы.
Регулирование параметров движения цилиндра 18 производится следующим об5 разом. Сигналы с выходов матрицы ИЛИ 7 поступают на вход элемента ИЛИ 8 и далее на включение генератора 9 импульсов. Каждый импульс от генератора 9 переключает на такт обегающее устройство 10, выходные
0 сигналы от которого поступают на входы матрицы И 11, в зависимости от программы которой переключаются распределители 12 - 14, выходы которых соединены-между собой. Если включены все распределители 12 - 14,
5 управляющиеся от одной матрицы И, то цилиндр 18 перемещается с максимальной скоростью. Положение, в котором выключены распределители 12 - 14, соответствует отсутствию движения двигателя. Все воз0 можные другие комбинации включений распределителей 12 - 14 в различные моменты времени регулируют закон движения цилиндра 18.
Дроссели 15 - 17 установлены для пол5 учения различных значений эффективных площадей (число значений 2п,п - число распределителей 12 - 14) и подбираются так, что эффективная площадь линии, в которой установлен следующий по порядку дроссель, в
0 два раза больше площади линии, в которой установлен предыдущий дроссель. Управление блоками 49 и 50 осуществляется сигналами, поступающими на управляющие входы их распределителей (аналогичных распредели5 телю 21) от матрицы ИЛИ 7.
Контроль отработки сигналов цилиндром 18 по времени осуществляется путем подачи сигналов на настроечные входы 40 - 42. При наличии сигнала на соответствующем входе (40 - 42) и соответствующем выходе матрицы И 1 через элемент И 36 вклю чается реле 30 времени, а через элемент ИЛИ 33 сигнал проходит на вход матрицы ИЛИ 7, отрабатывая задержку сигнала в данном такте. При отсутствии сигнала на входе 42 сигнал с выхода матрицы И 1 через элементы ЗАПРЕТ 39, ИЛИ 33 поступает на вход матрицы ИЛИ 7, минуя реле 30 времени, исключая его срабатывание.
Предлагаемая система позволяет повысить надежность и расширить область применения систем приводов, что определяет технико-экономическую эффективность изобретения.
Формула изобретения
Система программного управления
для пневмогидравлических приводов по
авт.св.№ 1521937, отличающаяся
тем, что, с целью расширения диапазона
0
5
0
применения и повышения надежности она снабжена дополнительными элементами И, ИЛИ и элементами ЗАПРЕТ, число каждого из которых равно числу столбцов программируемой матрицы И входного блока и выполнено с равными этому числу количе ствами реле времени и дополнительных на- строе -ныч входов, при этом каждый выход программируемой матрицы и входного блока соединен с одним из входов одного до полнительного элемента И и одного элемента ЗАПРЬТ, другие входы последних соединены с одним лополнител,ным настроечным входом, причем выходы элементов ЗАПРЕТ непосредственно, а выход; элементов И через реле времени соединены с входами дополнительных элементов ИЛИ, выходы которых подключены к входам программируемой матрицы ИЛИ.
