Известные электрические модели изгибаемого стержни иосгоянной и Переменной жесткости, выполненные в виде мостовой схемы, включающей в себя активные еонротивлени5;, два источника э. д.с. н два источника тока, содержат знакопеременный масштаб узлов и ограничены п применении по отношению к системе стержней/что сужает круг решаемых задач и затрудняет моделирование ряда стержневых систем, например стержневых систем с переменным сечением, смеш,аюш,имися узлами и др.
Для устранения указанных недостатков входные концы мостовой схемы перекреш,ены, а плечи, шунтируюшие вход и выход, ,,кроме сопротивления, содержат источник э.д.с., служащий для моделирования угла liepeKOca стержня.
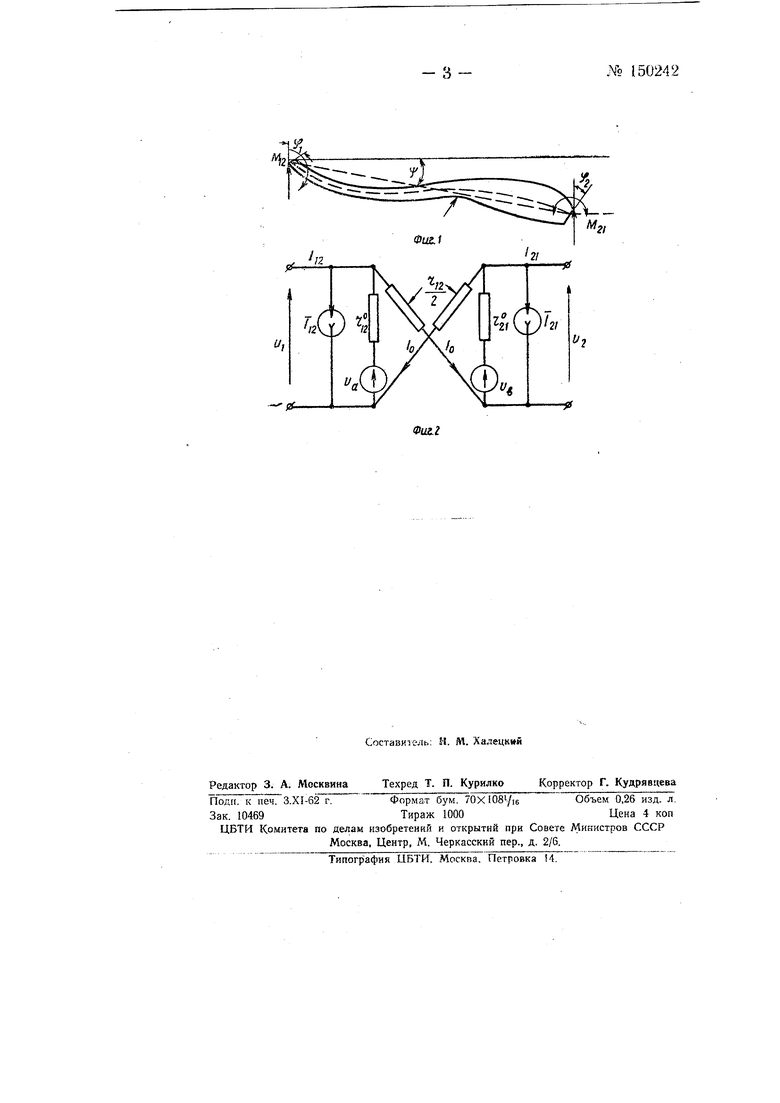
На фиг. 1 изображен изгибаемый стержень; на фиг. 2 - схема элек трнческой модели изгибаемого стержня.
Схема включает в себя активные сопротивления , IlCToqНИКИ э.д.с. На и Иь И ИСТОЧНИКИ тока /12 и /21.
. Предложенная схема является видоизменением известкой П-схемы (на чертеже-не показана), в которой перекрещены выходные концы, благодаря чему устранен знакопеременный масштаб, при этом схема из трехполюсной преобразовалась в четырехнолюсную.
Для получения симметрирования сопротивление г - ,2 разделеую на два одинаковых включенных в продольные ветви четырехполюсника.
Ток /о,Протекающий в перекрестных связях, пропорционален моменту разности поперечных сил, что позволяет применить схему также длм моделирования подвижных рам. Параметры схемы определяются 1яются следующими формулами; / аг - р
и,