Изобретение относится к аналоговой вычислительной технике и предназначено для исследования стержневых систем, содержащих изгибаемые стержни с односторонне работающими шарнирами, методом моделирования.
Целью изобретения является расширение функциональных возможностей устройства за счет учета поперечных сил на концах стержня и упрощение устройства.
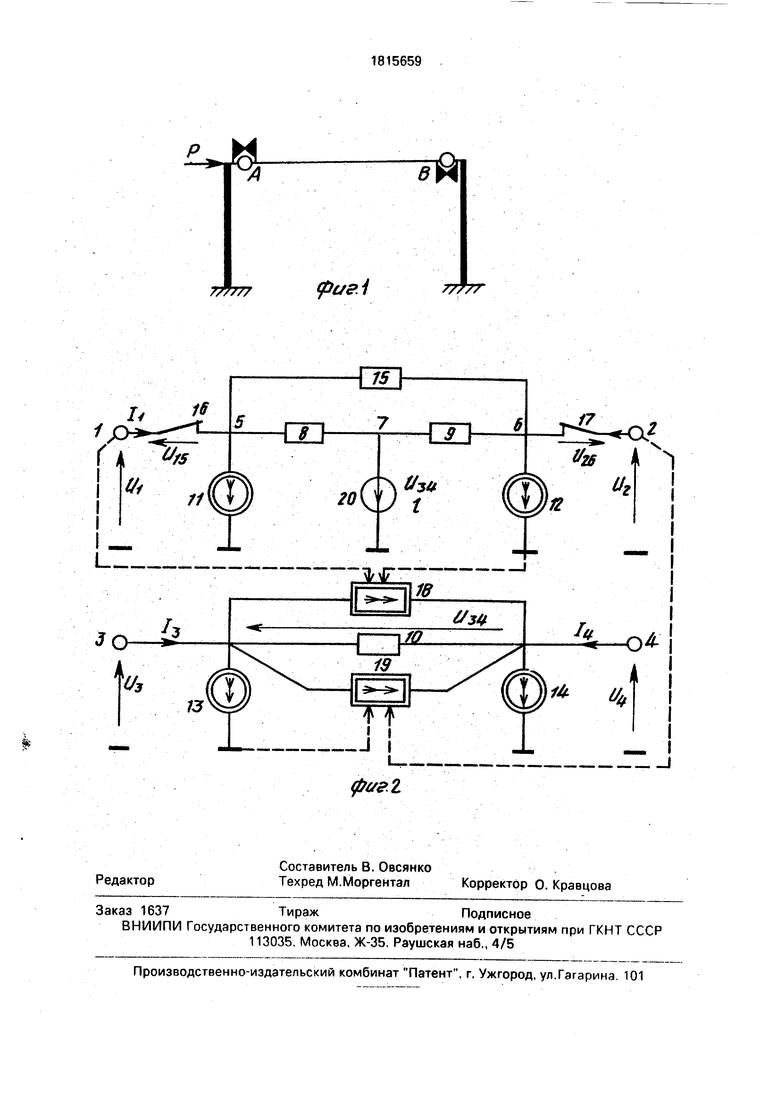
На фиг.1 изображена рама, содержащая изгибаемый стержень с односторонне работающими шарнирами, расположенными по концам стержня; на фиг.2 - схема устройства для моделирования изгибаемого стержня с односторонними шарнирами.
Устройство содержит две пары входных 1, 2 и 3, 4 узлов, в ветвях которых определяются токи, эквивалентные изгибающим моментам и поперечным силам соответственно в начале и в конце изгибаемого стержня, три промежуточных узла 5,6, 7, первый, второй и третий резисторы 8, 9, 10, проводимости которых равны соответственно Зд, Зд, gi, причем одни выводы двух резисторов 8 и 9 объединены в узле 7, а к двум другим выводам, соединенным с узлами 5, 6, подключены первый и второй источ00
ел о ел о
ники тока 11, 12, равные соответственно 1д, IB, а к выводам третьего резистора 10, соединенным с узлами 3 и 4, подключены третий и четвертый источники тока 13 и 14, равные соответственно Ic, ID, кроме того, к узлам 5 и 6 подключен резистор отрицательного сопротивления 15 с проводимостью - д, а между узлами 5,1 и 6,2 подключены два управляемых падением напряжения на них ключевых элемента 16 и 17 (Ki и Ка), два других входа устройства 3 и 4 соединены также двумя управляемыми источниками тока 18,19, величины которых равны 1уА, Ту в, а их управляющие выводы соединены соответственно с узлами 1 и 2 и с шиной нулевого потенциала, а к узлу 7 подключен управляемый падением напряжения на резисторе 10 источник напряжения 20, вели1чина которого равна у 1ЫРассмотрим устройство подробно.
Односторонне работающий шарнир, соединяющий стержни в узле стержневой системы (см. фиг.1), является устройством, воспринимающим изгибающий момент одного знака, тогда он закрыт, узел рамы считается жестким. Если деформации в системе под действием внешней нагрузки будут таковы, что он раскроется, то изгибающий момент в этом узле системы становится равным нулю и узел будет идеально шарнирным. Расчет стержневых систем, содержащих такие односторонне работающие шарниры, представляет сложную конструктивно нелинейную задачу строительной механики, когда заранее неизвестна та единственная рабочая расчетная схема рассчитываемой системы при действии данной нагрузки. Если стержневая система содер- .жит п односторонне работающих шарниров, то число вариантов возможных рабочих расчетных схем равно 2. Заданной нагрузке соответствует одна единственная рабочая расчетная схема. Определить ее аналитически практически невозможно. Найти рабочую расчетную схему и определить все внутренние усилия и деформации в системе можно только с помощью предлагаемого устройства.
Уравнения, характеризующие изгибаемый стержень, концы которого повернулись на углы и рв и сместились по вертикали на величины (5д и дв можно записать в следующем виде:
Мд 4i РА + 2i рв - 6i р + Мл
MB 2i узд + 4i рв - G(f) + MB, (1),
QA-fV + W A- dB+QA
I
I
QB- A-TPB- A- B+QB
где I
EJ I
- погонная жесткость стерж
- жесткость стержня, I - длина стержня; р - перекос стержня, Мд,
MB, QA, QB - изгибающие моменты и поперечные силы по концам жестко защемленного стержня АВ от поперечной нагрузки (при отсутствии шарниров).
Уравнения электрического тока, характеризующие предлагаемое устройство (в случае, когда ключевые элементы Ki и Кг закрыты), имеют вид:
li(3g-g)Ui-(-g)U2 + 3g
СЫ I
+ А,
I2-4-g)Ui + (3g-g)U2 + 3g I в, (2)
13 lyA + 1ув + giUs - gtU4 +Xc14 -lyA - lyB - gtUa + giU4 + ID.
Здесь у U34 --j-- - управляемый
I
1
1,
источник напряжения; уд - Ui, tye - управляемые источники тока, g2 -s
коэффициент, равный условной проводимо- сти. Управляемые источники тока в отличие от постоянных источников тока изображены на фиг.2 прямоугольниками.
Уравнения (1) и (2) будут полностью эквивалентны при соблюдении следующих ус- ловий:
Н У|-МА, U34 U3-U4, 2 Yt- MB,
Ui ,р Уи-у (Us - U4 U2
iPB .
1д }vMA, g V9- 2i, MB, (3)
I3 JVQA. Us Уи
M yi- QB,
U4 Уи 5в ,
Ј%
Тс yt QA. g2 yg у Ло yi QB,
0
5
R - 92
1
1
lyA U1, U2,
где У| , yu ,yg - масштабные коэффициенты токов, напряжений и проводимостей.
Таким образом на 4-х входах устройства отрабатываются токи и напряжения, эквивалентные концевым изгибающим моментам и поперечным силам, а также углам поворота и линейным перемещениям концов стержня.
При моделирования изгибаемых систем схемы-аналоги соединяются между собой в соответствии с геометрической схемой моделируемой стержневой системы. В качестве схем-аналогов стержней, не содержащих односторонние шарниры, используется схема фиг.2 без ключевых элементов. Такая схема содержит самое оптимальное число элементов при отработке всех неизвестных усилий и перемещений. Для стержней, имеющих односторонние шарниры, используется схема, показанная на фиг.2. Процесс моделирования может выполняться на специализированной аналоговой вычислительной установке, но более рационально его производить на цифровой вычислительной машине по программе для анализа электронных цепей. При этом необходимо вводить информацию о величинах сопротивлений всех положительных и отрицательных резисторов, постоянных источников тока и коэффициентах передачи управляемых источников тока и управляемого источника напряжения в соответствии с выражениями (3), а также о прямом и обратном сопротивлении ключевых элементов, о напряжении открывания и закрывания ключевых элементов, реагирующих на знак Uis или the.
Основными преимуществами предлагаемого устройства являются возможность более просто реализовать односторонние шарниры, наличие самого оптимального количества элементов и возможность реализации поперечных сил на двух концах стержня. Наличие в системе односторонних шарниров существенно усложняет ее расчет. Выполнить его можно только с помощью предлагаемого устройства.
Формула изобретения Устройство для моделирования изгибаемого стержня с односторонними шарнирами, содержащее три резистора, четыре источника тока, причем одни выводы первого и второго резисторов объединены, другие выводы первого и второго резисторов подключены к одним выводам первого и второго источников тока соответственно, другие
выводы которых соединены с шиной нулевого потенциала, первый вывод третьего резистора подключен к первому выводу третьего источника тока, второй вывод которого сое- диней с шиной нулевого потенциала, о т- личающееся тем, что, с целью расширения функциональных возможностей за счет учета поперечных сил на концах стержня и упрощения устройства, оно содержит два управляемых источника тока, уп- равляемый источник напряжения, два ключевых элемента и резистор отрицательного сопротивления, первый и второй выводы которого подключены к первым выводам первого и второго источников тока соответственно и через одноименные ключевые элементы - к первому и второму выводам определения изгибающего момента соответственно в начале и конце стержня устройства, объединенные выводы первого и второго резисторов соединены с первым выводом управляемого источника напряжения, второй вывод которого подключен к
шине нулевого потенциала, первые выводы первого и второго управляемых источников тока объединены с первым выводом третьего резистора и являются третьим выводом определения поперечной силы в начале
стержня устройства, четвертым выводом определения поперечной силы в конце стержня которого являются объединенные вторые выводы третьего резистора, первого и второго управляемых источников тока и первый
вывод четвертого источника тока, второй вывод которого подключен к шине нулевого потенциала, управляющий вывод первого управляемого источника тока соединен с первым выводом определения изгибающего момента в начале стержня устройства, второй вывод определения изгибающего момента в конце стержня которого подключен к управляющему выводу второго управляемого источника тока, третьи выводы
первого и второго управляемых источников тока соединены с шиной нулевого потенциала.
#
6
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования изгибаемого стержня | 1972 |
|
SU437104A1 |
| Устройство для моделирования изгибаемого стержня | 1977 |
|
SU674050A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПРЯМОЛИНЕЙНОГО ИЗГИБАЕМОГО СТЕРЖНЯ | 1973 |
|
SU397939A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ СТЕРЖНЕВЫХ РАМ | 1973 |
|
SU386408A1 |
| Устройство для моделирования стержневых рам | 1977 |
|
SU717794A1 |
| Устройство для вычисления функции @ = @ | 1984 |
|
SU1167621A1 |
| Устройство для моделирования изгибаемого стержня на упругом основании | 1975 |
|
SU565307A1 |
| Нелинейный преобразователь | 1984 |
|
SU1280406A1 |
| Интегратор | 1979 |
|
SU824226A1 |
| Устройство для моделирования изгибных колебаний стержней | 1981 |
|
SU1105911A1 |
Изобретение относится к аналоговой вычислительной технике и предназначено для исследования стержневых систем, содержащих изгибаемые стержни с одностороннее работающими шарнирами, методом моделирования. Цель изобретения - расширение функциональных возможностей устройства и его упрощение. С помощью устройства производится решение сложной конструктивно нелинейной задачи строительной механики с отработкой рабочей расчетной схемы и всех внутренних усилий и деформаций системы, содержащей односторонне работающие шарниры. Устройство содержит три резистора, четыре источника тока, причем одни выводы первого и второго резисторов объединены, другие выводы первого и второго резисторов подключены к одним выводам первого и второго источников тока соответственно, другие выводы которых соединены с шиной нулевого потенциала, первый вывод третьего резистора подключен к первому выводу третьего источника тока, второй вывод которого соединен с шиной нулевого .потенциала. В него дополнительно введены два управляемых источника тока, управляемый источник напряжений, два управляемых падением напряжения на них ключевых элемента и резистор отрицательного сопротивления. 2 ил. Ј
/xJV/V
pae.i
7777Т
| Устройство для моделирования изгибаемого стержня | 1977 |
|
SU710052A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Овсянко В.М | |||
| Синтез электронных моделей деформируемых объектов, Минск, изд | |||
| Наука и техника, 1982 г., с.285, рис | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
