Изобретение относится к аналоговой вычислительной технике.
Известно устройство для моделирования изгибаемого стержня, содер каш.ее ироводимости для моделирования жесткостных характеристик стержня, источники тока для моделирования моментов от нагрузки, источники тока и источники наиряжения.
Общими недостатками известных схем являются: отсутствие источников э.д. с., иеиосредственио моделирующих иеремещения концов стержня (а не перекос); отсутствие в ветвях схем токов, эквивалентных концевым поперечным силам (отсюда искусственное моделирование в этих схемах или .момента разности поперечных сил или суммы концевых моментов). Эти общие недостатки лоз-воляют решать с помощью таких схем чисто машинным способом без привлечения машинно-аналитических методов только небольшое количество линейных задач строительной механики, задачи о иеразрезных блоках на шарнирных опорах и регулярные рамы.
Предложенное устройство отличается тем, что, с целью решения нелинейных задач строительной механики оно содержит блоки индикатора касания и два сумматора-сравнителя, причем четыре проводимости включены по схеме прямоугольника: две - по диагоналям прямоугольника и две - параллельно
сторонам прямоугольника, а последовательно проводимостям этих сторон ирямоугольника включены через контакты реле блока индикатора касания источники напряжения; обмотки сумматоров-сравнителей, выполненных на реверсивных магнитных усилителях, включены соответственно в цепи с проводимостями, располол енными по сторонам прямоугольника, и в цепь дополнительной проводимости и источника напряжения, кроме того, соединенные последовательно реле, диод и кремниевые стабилитроны блока индикатора касания соединены также последовательно с источником опорного напряжения и источником напряжения, моделирующим перемещение коица стержня.
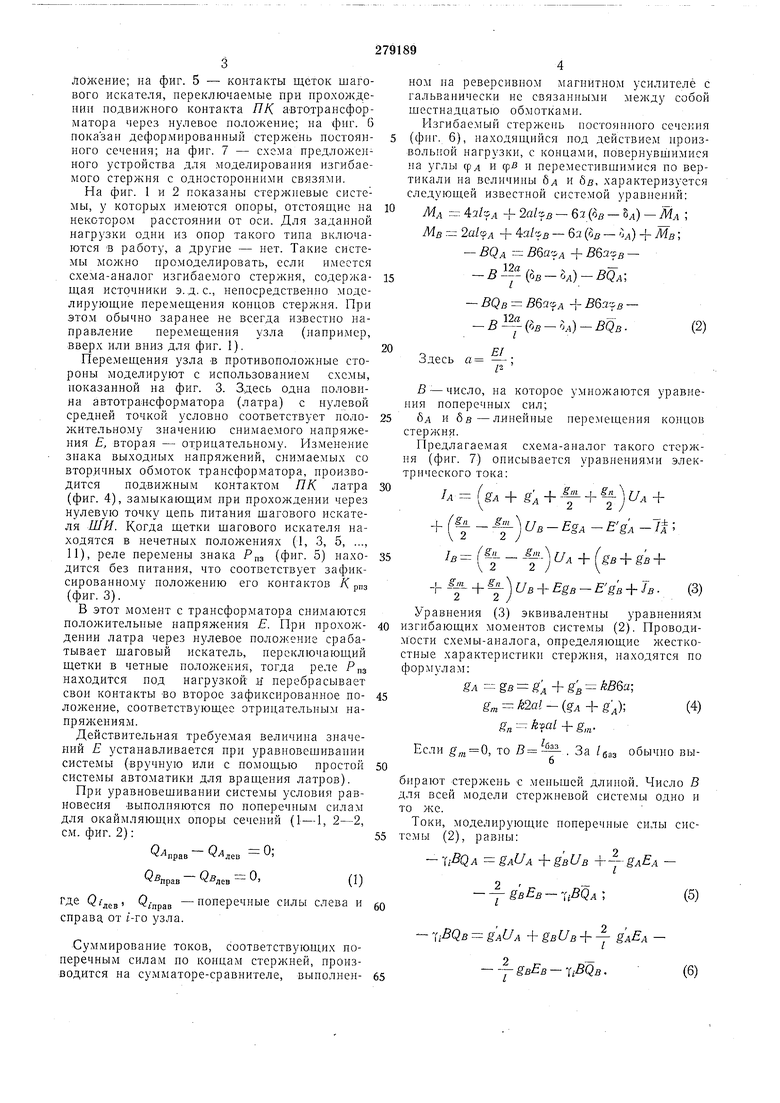
Па фиг. 1 представлена неразрезная балка с односторонними связями в виде опор, отстоящих на некотором расстоянии от оси балки; на фиг. 2 - ломаный стерлсень с односторонними связями; на фиг. 3 - схема источников э. д. с., нозволяющая получать на выходе нанряжения разных знаков. Контакты К рпз реле перемены знака позволяют получать положительные и отрицательные напряжения, соответствующие перемещениям узла вниз или вверх (влево или вправо); на фиг. 4 представлен подвижный контакт ПК, устанавливаемый на автотрансформаторе для регистрации перехода латра через нулевое среднее положение; на фиг. 5 - контакты щеток шагового искателя, переключаемые при прохождении подвижного контакта ПК, автотрансформатора через нулевое положение; на фиг. 6 показан деформированный стержень постоянного сечения; на фиг. 7 - схема предложенного устройства для моделирования изгибаемого стержня с односторонними связями. На фиг. 1 и 2 показаны стержневые системы, у которых имеются опоры, отстояоцш на некотором расстоянии от оси. Для заданной нагрузки одни нз онор такого типа включаются в работу, а другие - нет. Такие системы можно промоделировать, если имеется схема-аналог изгибаемого стержня, содержащая источники э.д. с., неиосредственно моделирующие перемещения концов стержня. При этом обычно заранее не всегда известно направление перемещения узла (напрИ Мер, вверх или вниз для фиг. 1). Пере.мещения узла в противоположные стороны моделируют с использованием схемы, показанной на фиг. 3. Здесь одна половина автотрансформатора (латра) с нулевой средней точкой условно соответствует положительному значению снимаемого напряжения Е, вторая - отрицательному. Изменение зиака выходных напряжений, снимаемых со вторичных обмоток трансформатора, производится подвижным контактом ПК латра (фиг. 4), замыкающИ М при прохождении через нулевую точку цепь питания шагового искателя ШИ. Когда щетки шагового искателя находятся в нечетных положениях (1, 3, 5, ..., 11), реле неремены знака РПЗ (фиг. 5) находится без питания, что соответствует зафиксированному положению его контактов /С рпз (фиг. 3). В этот момент с трансформатора снимаются положительные напряжения Е. При прохождении латра через нулевое положение срабатывает шаговый искатель, переключающий щетки в четные положения, тогда реле РПЗ находится под нагрузкой и перебрасывает свои контакты во второе зафиксированное положение, соответствующее отрицательным напряжениям. Действительная требуемая величина значеппй Е устанавливается при уравновещивании системы (вручную или с помощью простой системы автоматики для вращения латров). При уравновешивании системы условия равновесия выполняются по поперечным силам для окаймляющих опоры сечений (1-1, 2-2, см. фиг. 2): прав - лев - Сллев О где Qr,,, Q,.„ inpas поперечные силы слева и справа от /-ГО узла. ОМ на реверсивном магнитном усилителе с альванически не связанными между собой естнадцатью обмотками. Изгибаемый стержень постоянного сечекия фнг. 6), находящнйся нод действием нроизольной нагрузки, с концами, новернувшимися а углы фл и cpj5 и переместившимися по верикали на величины бл и бд, характеризуется ледующей известной системой уравнений: МА - 43/зл + 2а/ад - 6з (од - ол) - МА ; MB .- 2а/9л + 4я/9в - 6з (йд ол) + Яз; - БОА 56асрл + .B-f-A}-BQA; - BQs 56асрл + BQa-лв - (oд-oл). оEI Здесь д -; / Б -число, на которое умножаются уравнеия поперечных сил; бл и бв-линейные перемещения концов ержня. Предлагаемая схема-аналог такого стерж(фиг. 7) описывается уравнениями элекического тока: /л-(л+ёл+ + )л + + (} UB-EgA -EgA-n 5 v--T-) + V Z UB + EgB-EgB + JB. (3) + -T+2 Уравнения (3) эквивалентны уравнениям гибающих моментов системы (2). Проводиости схемы-аналога, определяющие жестконые характеристики стержия, находятся по ормулам: gA gB gA+gB g- fi2a - (дл + g);(4) й„ - A-fa/+ g-mЕсли g,,j 0, ТО В . За /баз обычно вырают стержень с меньшей длиной. Число В я всей модели стержневой системы одно и же. Токи, моделирующие поперечные силы сисмы (2), равны: -iiBQA ёлОл i-gsUB +-- ёлЕл - - gsEs - iiBQA ; gBUB + Здесь источники э.д. с. ЕА и ЕВ определяются так: ЕА Е-В-ЕВ Е.В.(7) Величины э.д. с. ЕА и ЕВ полностью аналогичны перемещениям концов стержня. Ток (выражение 5) получают по частям, для чего из тока, протекающего з ветвях с проводимостями gA и §д, ёА и А + ёвОв Л- SA- ёв (8) вычитают ток, равный «(i-f) Ток (9) получают либо из раздельных це1 ,,1 пей, питаемых источникам,и э.д. с.--сд и -- Dt ЕВ , либо из одной цепи, куда подается- разность э.. д. с.- (ЕА-ЕВ), как это ноказано В на схеме фиг. 7. Проводимость g в этой дополнительной цепи равна: (-2S) „. Суммирование и вычитание токов производятся на сумматоре-сравнителе, выполненном на реверсивном магнитном усилителе. Уравнения (3) характеризуют схему-аналог изгибаемого стержня с односторонними связями в момент, когда контакты реле PI и РЗ включены так, как это показано па фиг. 7. В этот момент концы стержня АВ (фиг. 2) свободно неремещаются, их перемещениям соответствуют источники э.д. с. Е и Е . Источники тока /л и /в , как это видно из уравнений (2) и (3), моделируют моменты по концам жестко защемленного стержня. Источники тока 7 моделируют моменты по концам защемленного стержня АВ, если его левый конец нереместится на величину б л (фиг. 2), источники тока /J - моменты по концам защемленного стержня, если его конец переместится на величину бд. Цепи с источниками э.д. с. ЕОП, кремниевыми стабилитронами С, включенными в обратном направлении, и реле PI и Р- подбираются на иапряженйя пробоя цепочек, соответствующие перемещениям бл и Од. В момент достижения, например, напряжением Е величины, эквивалентной перемещ.ению бд, срабатывает реле PI, отключая от схемы-аналога источники э.д. с. Е и сумматор-сравнитель EQ и включая источники тока L . Диоды D служат для пропуска тока по цепя.м в одном направлении. Контакты реле перемены знака /Српз и ЛГрпзя- срабатывают тогда, когда узлы А i В (фиг. 2) перемещаются не вправо, а влево; в этот момент изменяется знак источников э.д.с. (фиг. 3), моделирующих пepc ieщeния концов стержня. Если один из концов стержня не имеет односторонней связи, то в схеме (фиг. 7) отсутствуют соответствующие источники э.д. с. (Е или Е ) и все ветви цепи, необходимые для реализации эквивалентного перемещения. После уравновешивания электрической модели (выполнения условий эквивалентностн тина () но поперечным силам для окаймляющих узлы сечений посредством суммирования на сумматорах-сравнителях соответствующих токов) остается измерить токи, протекающие в 1 ачалах и концах схем-аналогов и, разделив их на масштабные коэффициенты Oj, получить изгибающие моменты но ко)щам каждого стержня. , Предмет изобретения Устройство для моделирования изгибаемого стержня, с односторонними связями, содержащее проводимости для моделирования жесткостных характеристик стержня, источники тока для моделирования моментов от нагрузки по концам жестко защемленного стержпя, рсточники тока для моделирования перемещений концов защемленного стержня и источники напряжения, отличающееся тем, что, с целью решения нелинейных задач строительной механики, оно содержит блоки индикатора касания и два сумматора-сравнителя, причем четыре проводимости включены по схеме прямоугольника, две нроводимости - по диагоналям прямоугольника и две проводимости включены параллельно сторонам прямоугольника, а последовательпо проводимоетям этих сторон прямоугольника включены через контакты реле блока индикатора касания источника напряжения, обмотки сумматоров-сравнителей, выполненных на реверсивных магнитных уснлителях, включены соответственно в цепи с проводимостями, расположенными по сторонам прямоугольника, и в цепь дополнительной проводимости и источиика напряжения, кроме того, соединенные последовательно реле, диод и кремниевые стабилитроны блока индикатора касания соединены также последовательно с источннком опорного напряжения и источников напряжения, моделируюп.и1м перемепдение конца стержня.
N.
a e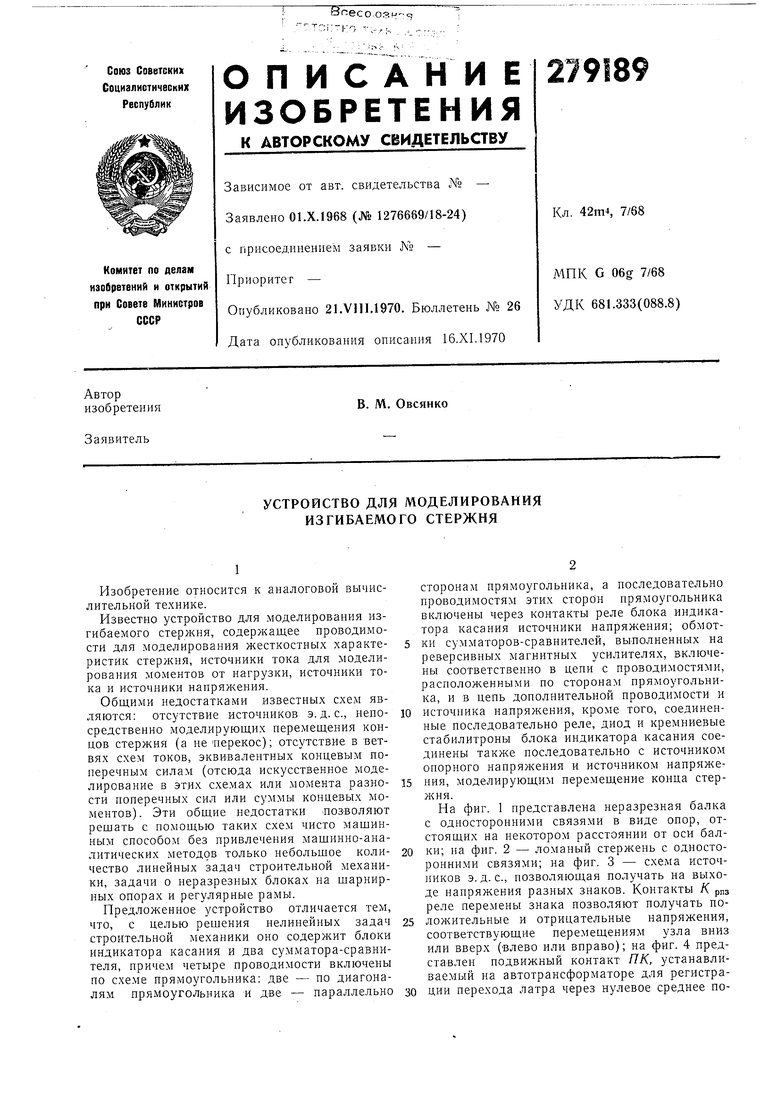
fr
i
i
-4
