I
(21)4239698/27-03
(22)04.05.87
(46) 23.08.89. Бкш. № 31 (72) В.Л.Ускорен (53) 621.867 (088.8)
(56) Авторское свидетельство СССР № 552254, кл. В 65 G 47/46, 1977.
Авторское свидете ьстно СССР N 800071, кл. В 65 С 47/46, v81.
(54) УСТРОЙСТВО /ЦТЯ АВТОМАТИЧЕСКОГО ВЫБОРА НАПРАВЛЕНИЯ ДВИЖЕНИЯ ОБЪЕКТА
(57) {i:jобретение относится к управлению rpaHcnopTHbiMii средствами с автоматическим адресованием. Цель - повышение надежности и расширение функциональных возможностей. Устрой- гтво содержит датчики 1 фактического положения, дешифраторы 2 двоичного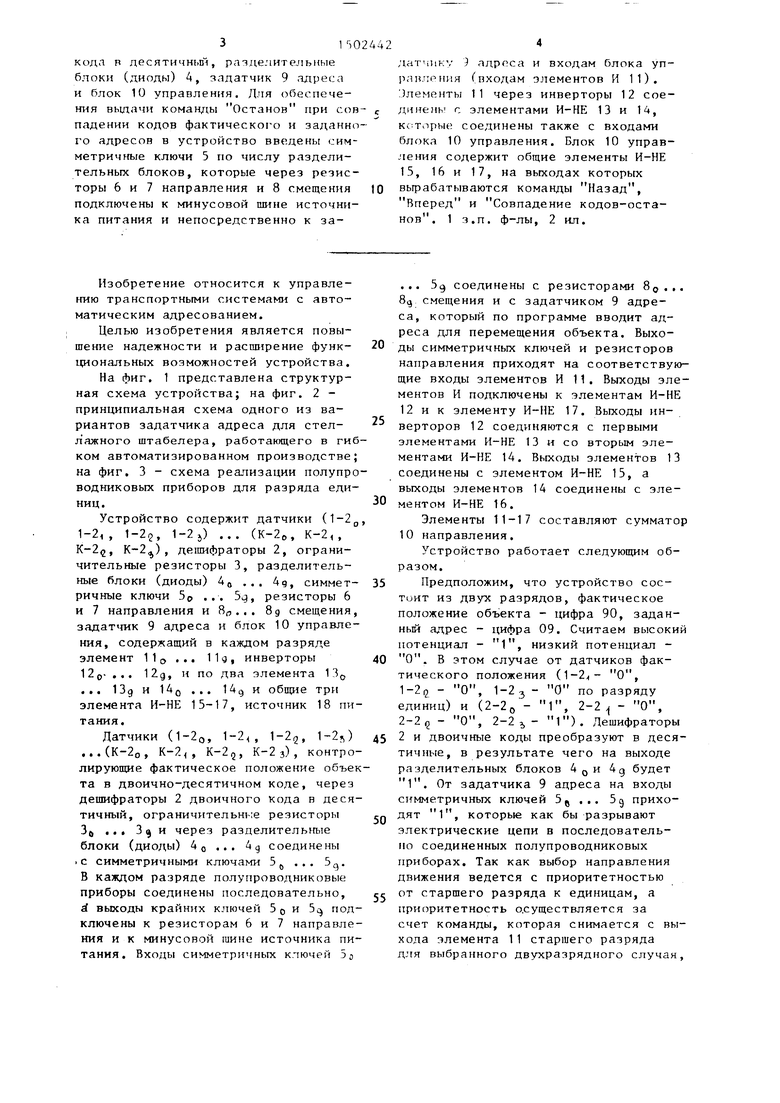

| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровое устройство для измерения несимметрии напряжений | 1980 |
|
SU993162A1 |
| Устройство для управления информационными указателями | 1972 |
|
SU449363A1 |
| Устройство для ввода-вывода информации | 1983 |
|
SU1116422A1 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 1991 |
|
RU2018902C1 |
| Устройство для управления автоматическими транспортными средствами | 1983 |
|
SU1101841A1 |
| Устройство для входного контроля изделий | 1990 |
|
SU1746388A2 |
| Микропрограммное устройство формирования тестовой последовательности | 1984 |
|
SU1267425A1 |
| Устройство управления приводом механизма передвижения транспортного средства для обслуживания стеллажа | 1986 |
|
SU1402520A1 |
| Устройство для централизованного контроля параметров | 1985 |
|
SU1280397A1 |
| Устройство для управления распределенным объектом | 1984 |
|
SU1182487A1 |
Изобретение относится к управлению транспортными средствами с автоматическим адресованием. Цель - повышение надежности и расширение функциональных возможностей. Устройство содержит датчики 1 фактического положения, дешифраторы 2 двоичного кода в десятичный, разделительные блоки (диоды) 4, задатчик 9 адреса и блок 10 управления. Для обеспечения выдачи команды "Останов" при совпадении кодов фактического и заданного адресов в устройство введены симметричные ключи 5 по числу разделительных блоков, которые через резисторы 6 и 7 направления и 8 смещения подключены к минусовой шине источника питания и непосредственно к задатчику 9 адреса и входам блока 10 управления (входам элементов И 11). Элементы 11 через инверторы 12 соединены с элементами И-НЕ 13 и 14, которые соединены также с входами блока 10 управления. Блок 10 управления содержит общие элементы И-НЕ 15, 16 и 17, на выходах которых вырабатываются команды "Назад", "Вперед" и "Совпадение кодов- останов". 1 з.п. ф-лы, 2 ил.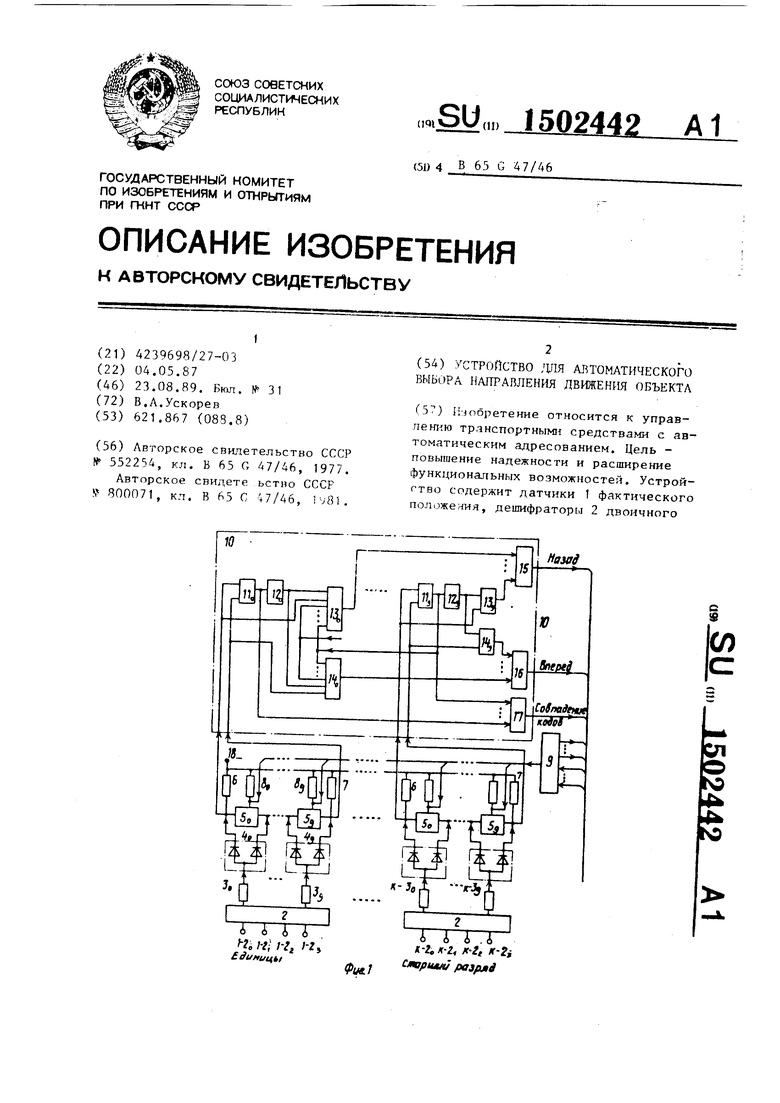
i i, i
п, 1-г11-г, п
3иници
сл
:л
э
ФилЛ
i I i i «-г, Ki K-2t K ii
сяоршл/ paa/uti
31S02
кода в десятичньп1, разделительные блоки (диоды) А, задатчик 9 .адреса и блок 10 управления. Для обеспечения выдачи команды Останов при сов- падении кодов фактическог о и заданного адресов в устройство введены симметричные ключи 5 по числу разделительных блоков, которые через резисторы 6 и 7 направления и 8 смещения подключены к минусовой шине источника питания и непосредственно к заИзобретение относится к управлению транспортными системами с автоматическим адресованием.
Целью изобретения является повышение надежности и расширение функ- циональных возможностей устройства.
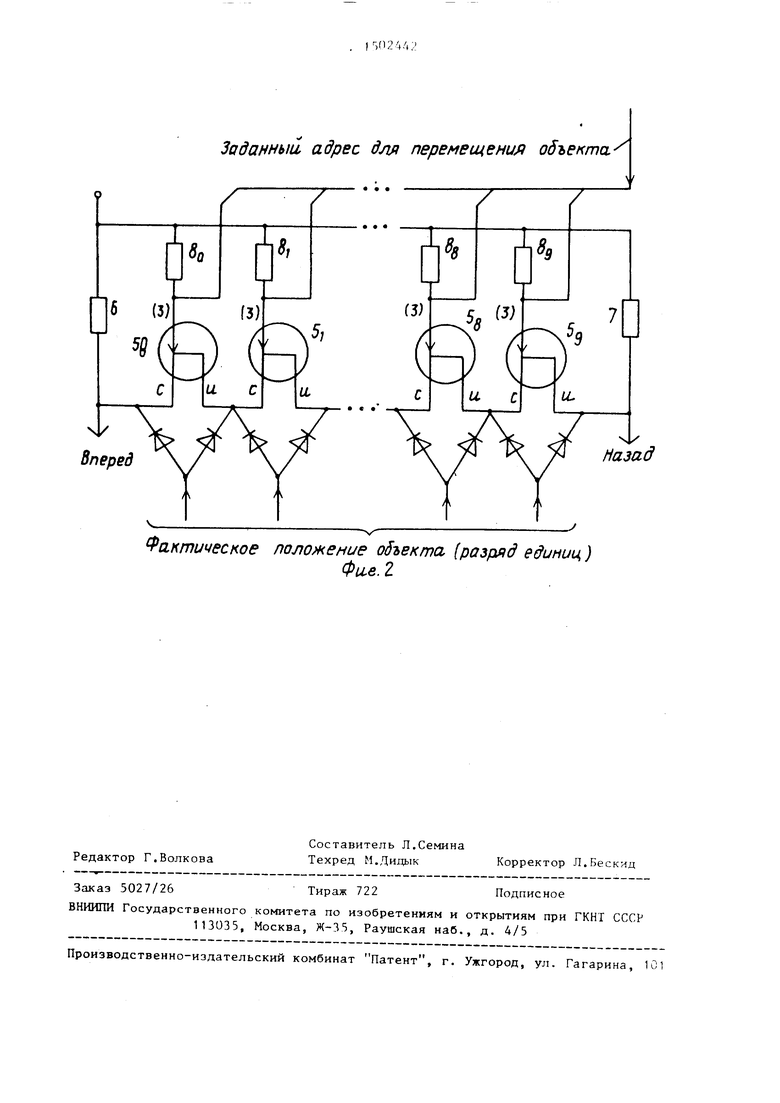
На фиг. 1 представлена структурная схема устройства; на фиг. 2 - принципиальная схема одного из вариантов задатчика адреса для стел- лажного штабелера, работающего в гибком автоматизированном производстве; на фиг. 3 - схема реализации полупроводниковых приборов для разряда единиц.
Устройство содержит датчики (1-2 1-2, , 1-22, 1-2 j) ... (К-2с,, К-2,, К-25, ) , дешифраторы 2, ограничительные резисторы 3, разделительные блоки (диоды) 4о ... ч, симмет- ричные ключи Зр ... , резисторы 6 и 7 направления и 8,,... 8д смещения, задатчик 9 адреса и блок 10 управления, содержащий в каждом разряде элемент 11о ... llQf инверторы 12с,- ... 12д, и по два элемента 13 ... 13д и 14о ... 14д и общие три элемента И-НЕ 15-17, источник 18 питания.
Датчики (1-2о, 1-2, 1-22, 1-2.,) ...(К-2о, К-2, К-25, К-2з), контролирующие фактическое положение объекта в двоично-десятичном коде, через дешифраторы 2 двоичного кода в десятичный, ограничительнь;е резисторы Зц ... 3q и через разделительные блоки (диоды) 4 о ... 4д соединены .с симметричными ключами 5 ... 5д. В каждом разряде полупроводниковые приборы соединены последовательно, d выходы крайних ключей 5 о и Зс подключены к резисторам 6 и 7 направления и к минусовой гаине источника питания. Входы симметричных ключей 5 о
датчику 9 адреса и входам блока уп- раи.гтения (входам элементов И 11). )лементы 11 через инверторы 12 сое- динень с элементами И-НЕ 13 и 14, к(;торые соединены также с входами блока 10 управления. Блок 10 управления содержит общие элементы И-НЕ 15, 16 и 17, на выходах которых вьфабатываются команды Назад, Вперед и Совладение кодов-оста- нов. 1 з.п. ф-лы, 2 ил.
0
0
5 0
5 „ 5
... Зд соединены с резисторами 8,,, Bq смещения и с задатчиком 9 адреса, который по программе вводит адреса для перемещения объекта. Выходы симметричных ключей и резисторов направления приходят на соответствующие входы элементов И 11. Выходы элементов И подключены к элементам И-НЕ 12 и к элементу И-НЕ 17. Выходы инверторов 12 соединяются с первыми элементами И-НЕ 13 и со вторым элементами И-НЕ 14. Выходы элементов 13 соединены с элементом И-НЕ 15, а выходы элементов 14 соединены с элементом И-НЕ 16.
Элементы 11-17 составляют сумматор 10 направления.
Устройство работает следующим образом.
Предположим, что устройство состоит из двух разрядов, фактическое положение объекта - цифра 90, задан- ньй адрес - цифра 09. Считаем высокий потенциал - 1, низкий потенциал - О. В этом случае от датчиков фактического положения ( О, 1-2 - О, 1-23 - О по разряду единиц) и (2-2о - 1, 2-2 - О, 2-25 - О, 2-2i - 1). Дешифраторы 2 и двоичные коды преобразуют в десятичные, в результате чего на выходе разделительных блоков 4дИ 4д будет 1. От задатчика 9 адреса на входы симметричных ключей 3 ... Зд приходят 1, которые как бы разрывают электрические цепи в последовательно соединенных полупроводниковых приборах. Так как выбор направления движения ведется с приоритетностью от старшего разряда к единицам, а при(5ритетность о.существляется за счет команды, которая снимается с выхода элемента 11 старшего разряда для выбранного двухразрядного случая.
515
то будем иметь направление движения объекта Назад, т.е. на выходе элемента 15 будет О, который включает исполнительный орган в блоке управления объектом. Объект начинает двигаться после того, как произойдет по разряду десятков сравнение кодов фактического положения и заданного адреса, направление вырабатывается разрядом единиц, а когда и по разряду единиц наступает сравнение кодов, то на выходе элемента 17 появляется О. Таким образом за счет минимальных технических средств предлагаемое устройство позволяет получить дополнительную, крайне необходимую команду, определяющую останов движущегося объекта - Совпадение кодов.
Формула изобретения
кия через последовательное соединени дешифраторов, ограничительных резисторов и разделительных блоков соединены с выводами соответствующих мстричных ключей, которые для крайни симметричных ключей в каждом разряде соединены с соответствующими входами блока управления и через резисторы направления - с минусовой шиной ист точника питания,, управляющие выводы симметричных ключей соединены через резисторы смещения с минусовой шиной источника питания и непосредственно - с выходом задатчика адреса. 2. Устройство по п. 1, отличающееся тем, что блок управления содержит три элемента И-НЕ, выходы которых являются соответствующими выходами блока, и в каждом разряде последовательно соединенные элементы И и инвертор и два элемента И-НЕ, при этом входы элементов И в каждом разряде являются соответствующими входами блока и соединены также с первыми входами первого и второго элементов И-НЕ своего разряда, вторые входы которых соединены с выходом инверторов своего разряда, другие входы элементов И-НЕ в разрядах попарно соединены и подключены к выхо- рам элементов И остальных разрядов, выходы элементов И-НЕ разрядов соединены с соответствуюпщми входами общих первого и второго элементов И-НЕ.
Заданный адрес дда перемещение объекта ...
Вперед
Фактическое положение объекта разряд единиц)
Фие.2
Назад
