Известны электродинамические стенды для физического моделирования систем автоматического управления, имеющих датчики линейных ускорений, которые состоят из крутильной установки, содержащей на одном из плеч поворотную платформу С моделируемым датчиком линейных ускорений.
Недостатком этих стендов является то, что они предъявляют повышенные требования к стабилизацией контура следящей системы, стабилизации числа оборотов крутильной установки и к точности выполнения функционального потенциометра положения поворотной платфорМЫ.
Предлолсенный стенд лишен указанного недостатка. Сущность изобретения заключается в том, что поворотная платформа стенда -снабжена вторым датчиком линейных ускорений, включенным в цепь обратной связи. Эта цепь стабилизирует заданное значение линейного ускорения, которое действует на моделируемый датчик линейных ускорений.
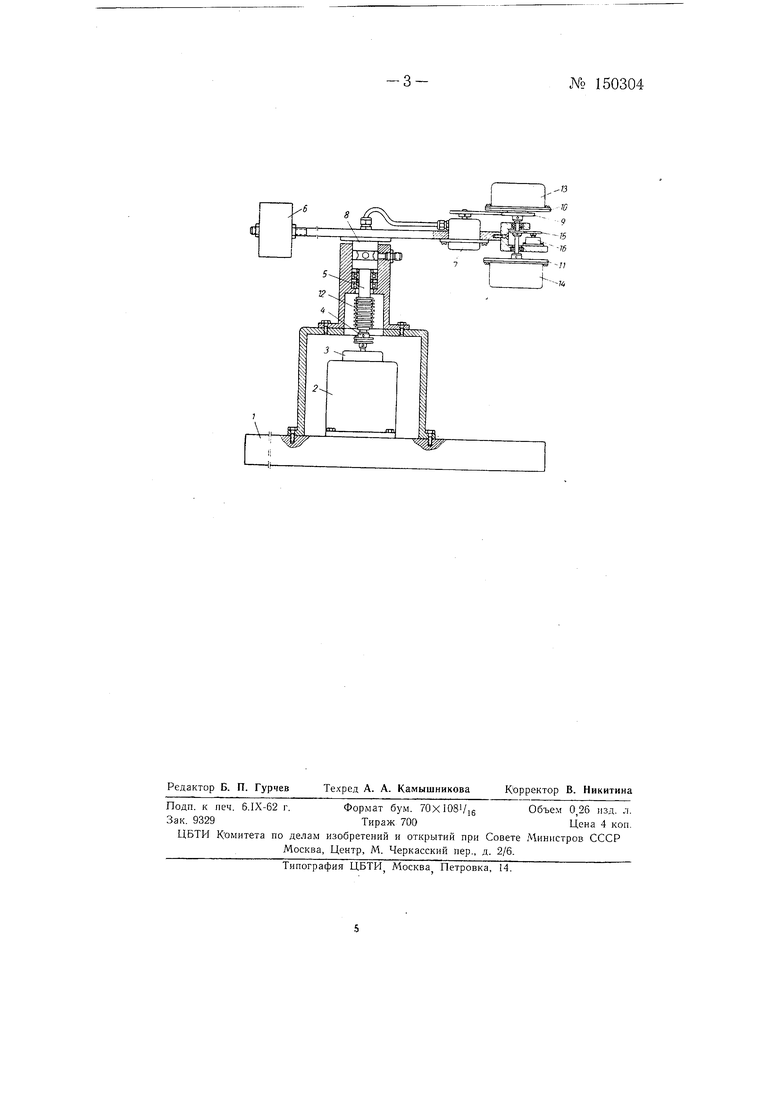
На чертеже изображена схема предложенного стенда. Стенд состоит из основания }, электродвигателя 2, редуктора 3, муфты 4, вала 5, груза 6, электропневмэтического исполнительного двигателя 7, воздухоподвода 8, редуктора 9, поворотных платформ 10 и 11, коллектора 12, датчиков 13 и 14 линейных ускорений, редуктора 15 и функционального потенциометра 16.
На .массивном основании 1 укреплен электродвигатель 2 с редуктором 3, который через муфту 4 приводит ВО вращение вал 5 с укреплен№ 150304-2ной на нем балкой. На „балке расположены уравновешивающий груз 6, электропневматнческий исполнительный двигатель 7, питающийся через вращающийся воздухоподвод 8 и поворачивающийся через редуктор 9 поворотные плат формы 10 и 11. Электрические цели стенда коиМмутируются через коллектор 12. На платформе 10 установлен датчик 13 линейных ускорений, который включается в схему физического моделирования объекта. На платс|)орме // установлен специальный дополнительный датчик 14 линейных ускорений, включенный в цепь обратной связи следящей системы, которая отрабатывает ускорения на поворотной ллатформе 10 в соответствии с напряжением, пропорциональным ускорениям моделируемого объекта, получаемьш от электронной модели.
Вал поворотных платформ 10 и 11 через редуктор 15 при отработке входного напряжения .следящей системой поворачивает щетку функционального потенциометра 16, включенного во входную цепь электромагнитного интегратора, с целью компенсации уменьщекия коэффициента усиления в системе при увеличении амплитуды входного напряжения.
Предмет изобретения
ЭлектродинаМ.ический стенд для физического моделирования систем автоматического управления, имеющих датчики линейных ускорений, состоящий из крутильной установки, на одном из плеч которой помещена поворотная платформа с моделируемым датчиком линейных ускорений, отличающийся тем, что, с целью снижения требований к стабилизации контура следящей системы, к стабилизации числа оборотов крутильной установки и к точности выполнения функционального потенциометра 1положения поворотной платформы, на поворотной платформе установлен второй датчик линейных ускорений, включенный в цепь обратной связи, стабилизирующей заданное значение линейного ускорения, действующего на моделируемый датчик линейных ускорений.
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик линейной скорости | 1959 |
|
SU126627A1 |
| Дорожный профилограф | 1959 |
|
SU123721A2 |
| УСТРОЙСТВО для МОДЕЛИРОВАНИЯ РАБОТЫ ДАТЧИКОВПЕРЕГРУЗКИ | 1968 |
|
SU219920A1 |
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2163387C1 |
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2160927C1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ АНОМАЛИЙ СИЛЫ ТЯЖЕСТИ | 1998 |
|
RU2143124C1 |
| Способ полунатурных роботизированных исследований и испытаний систем управления беспилотных воздушных судов вертикального взлета и посадки (БВС ВВП) | 2021 |
|
RU2771692C1 |
| Стенд для исследования приводов станков | 1985 |
|
SU1290128A1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ТОРМОЗНОЙ СИСТЕМЫ АВТОМОБИЛЯ | 2010 |
|
RU2426662C1 |
| ИСПЫТАТЕЛЬНЫЙ СТЕНД | 2010 |
|
RU2431814C1 |