Известны устройства для моделирования работы датчиков нерегрузки, содержащие центрифугу, на которой установлены поворотные платформы с укрепленными на них датчиками.
Предложенное устройство отличается от известных тем, что оно содержит замкнутые следящие системы но числу моделируемых датчиков, узлы которых укреплены на цептрифуге, а валы двигателей через редукторы соединены с поворотными платформами для изменения углов между линиями перемещения чувствительных элементов датчиков относительно векторов ускорения, причем сами моделируемые датчики подключены ко входам усилителей рассогласования упомянутых следящих систем в качестве элементов цепи обратной связи по положению.
Это упрощает процесс моделирования знакопеременных перегрузок.
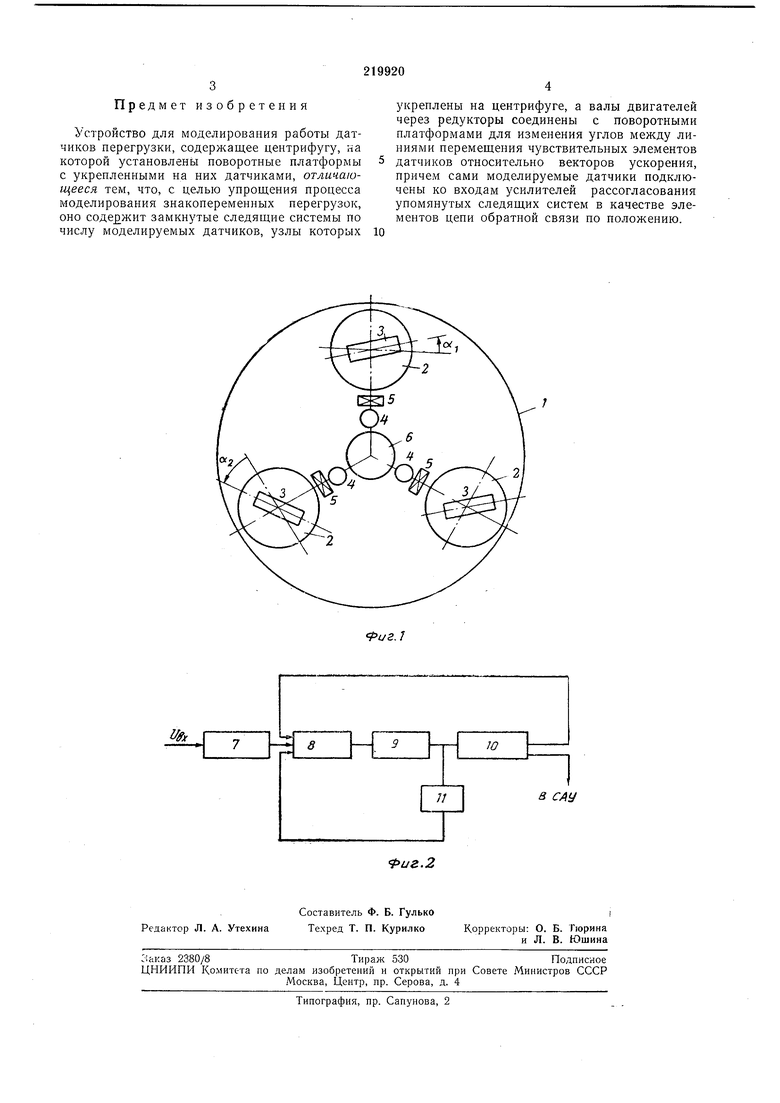
На фиг. 1 показана кинематическая схема устройства; на фиг. 2 - схема следящей системы управления двигателем.
Устройство состоит из центрифуги /, которая создает центробежное ускорение, равное ()R, где со - угловая скорость вращения центрифуги, а R - расстояние точки от центра вращения. На расстоянии R на поворачивающихся платформах 2 закреплены датчики перегрузки 3.
Перегрузка, действующая на датчики 3,
ш-R . равна п sin а, где а - угол поворота оси
датчика относительно линии, перпендикулярной радиусу платформы центрифуги 1, проходящей через центр вращения датчика 3 на платформе 2.
Поворот платформы 2 осуществляется электродвигателем 4 через редуктор 5.
Питание всех агрегатов, установленных па вращающейся платформе центрифуги 1, осуществляется при помощи токосъемника 6. Двигатель является исполнительным механизмом следящей системы.
Следящая система (см. фиг. 2) состоит из модулятора 7, усилителя 8, электродвигателя 9, датчика перегрузки 10 и тахогенератора И.
В следящей системе моделируемые датчики перегрузки используются в качестве датчиков обратной связи по положению.
Необходимые максимальные обороты цент0)2
рифуГИ выбираются из условия Jmax
Следящая система, поворачивая платформу 2, поддерживает равенство заданного и действующего ускорений.
Предмет изобретения
Устройство для моделирования работы датчиков перегрузки, содержащее центрифугу, на которой установлены новоротные платформы с укрепленными на них датчиками, отличающееся тем, что, с целью упрощения процесса моделирования знакопеременных перегрузок, оно содержит замкнутые следящие системы по числу моделируемых датчиков, узлы которых
укреплены на центрифуге, а валы двигателей через редукторы соединены с поворотными платформами для изменения углов между линиями неремещения чувствительных элементов датчиков относительно векторов ускорения, причем сами моделируемые датчики подключены ко входам усилителей рассогласования упомянутых следящих систем в качестве элементов цени обратной связи но положению.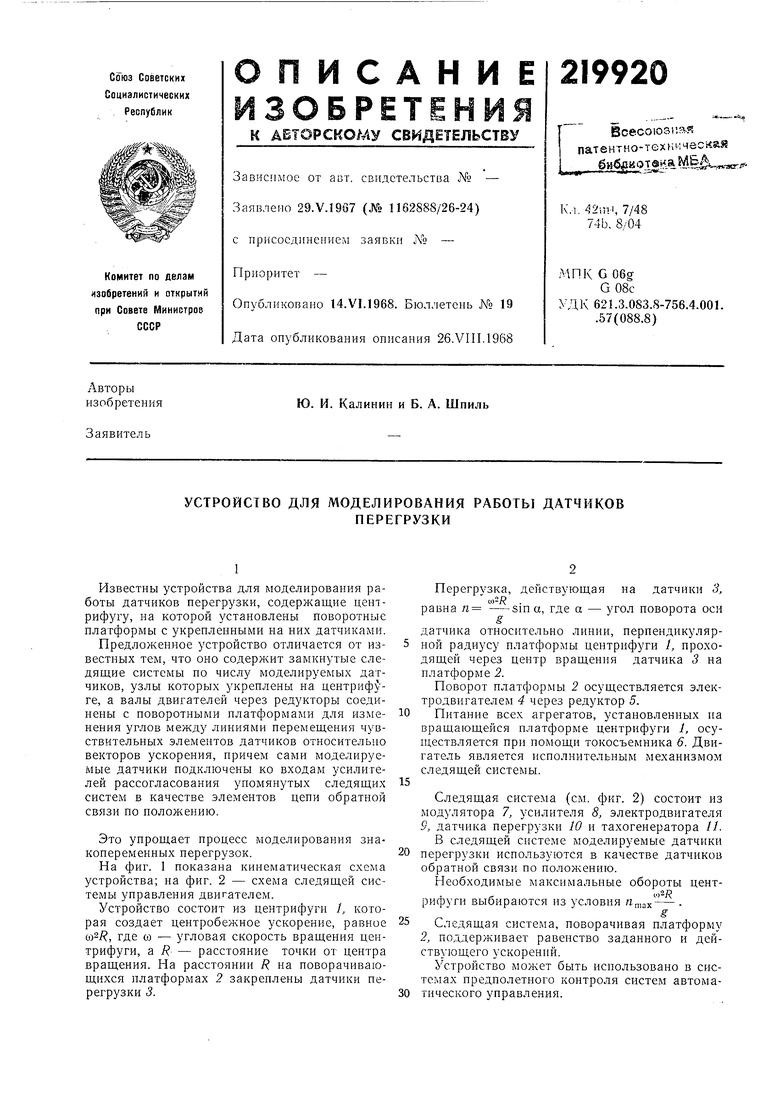
| название | год | авторы | номер документа |
|---|---|---|---|
| Электродинамический стенд для физического моделирования систем автоматического управления, имеющих датчики линейных ускорений | 1961 |
|
SU150304A1 |
| ДИНАМИЧЕСКИЙ ТРЕНАЖЕР | 2003 |
|
RU2254617C2 |
| Тренажер для подготовки пилота | 2015 |
|
RU2610318C1 |
| СПОСОБ УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ПОДВИЖНОГО НОСИТЕЛЯ, ИНТЕГРИРОВАННАЯ СИСТЕМА, УСТРОЙСТВО ПРИВЕДЕНИЯ ЗЕРКАЛА АНТЕННЫ В ПОВОРОТНОЕ ДВИЖЕНИЕ В ДВУХ ВЗАИМНО ПЕРПЕНДИКУЛЯРНЫХ ПЛОСКОСТЯХ И УСТРОЙСТВО ПРИВЕДЕНИЯ В ДЕЙСТВИЕ ДИФФЕРЕНЦИАЛЬНЫХ АЭРОДИНАМИЧЕСКИХ РУЛЕЙ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2423658C2 |
| СПОСОБ РЕКУПЕРАЦИИ ЭНЕРГИИ ГИДРОПРИВОДА ПОВОРОТНОЙ ПЛАТФОРМЫ ЭКСКАВАТОРА | 2016 |
|
RU2618154C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1996 |
|
RU2142643C1 |
| Следящий привод стабилизации бортовой и килевой качки | 2020 |
|
RU2766552C2 |
| Устройство для определения моментов газостатических опор | 1990 |
|
SU1756778A2 |
| Система управления приводом портала машины термической резки | 1989 |
|
SU1692781A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СЛЕДЯЩЕЙ СИСТЕМЫ | 1979 |
|
SU826287A1 |
