1 1
Изобретение относится к станкостроению, в частности к стендам для исследования двухдвигательных приво- дов металлообрабатывающих станков.
Целью изобретения является расши- рение функциональных возможностей стенда, т.е. расширение диапазона моделируемых типов станков (при одновременном повышении адекватности моделирования) и увеличение числа изменяемых параметров при исследовании их влияния на согласованную работу приводов.
На чертеже изображена структурная схема предлагаемого стенда.
Стенд содержит редуктор 1, со- стояший из зубчатых колес 2-4. Колеса 2 и 4 связаны с исполнительными двигателями 5 и 6 через торсионы 7 и 8. В кинематическую цепь между исполнительным двигателем 5 и торсио- ном 7 введена электромагнитная муфта 9. На валах исполнительных двигателей 5 и 6 размещены датчики 10 и 11 положения, не охватывающие упругость кинематической цепи (торсионы и 8). На валах колес 2 и 4 размещены датчики 12 и 13 положения. Вал колеса 3 связан с дополнительным двигателем 14. Выход системы 15 управления связан с входами двигателей 5,6 и 14, а также электромагнитной муфты 9. Вход системы 15 управления связан с выходами датчиков 10-13 положения. Передаточное отношение редукто- ра 1 равно 1 .
Описанная схема может быть собрана из стандартных блоков и элементов Система управления построена по известным правилам для управления ти- ристорными приводами.
Стенд работает следующим образом.
С выхода системы 15 управления задание поступает на исполнительные двигатели 5 и 6 и на дополнительный двигатель 14. Двигатели 5 и 6 имитируют исследуемые кинематически связанные двигатели тяжелых станков. Жесткость кинематической связи определяется расчетн-jiM путем и варьируется с помощью сменных торсионов 7 и 8. Устанавливая неодинаковые торсионы, можно имитировать несимметричное положение режущего инструмента отно
сительно исследуемых двигателей 5 и 6. ВНИИПИ Заказ 7891/37
Филиал ПИП Патент, г. Ужгород, ул. Проектная, 4
S
01
5
5
0
0
5
0
5
282
В зависимости от стр уктуры системы управления приводами реального станка и от требуемой точности регулирования датчики положения могут охватывать упругость кинематической цепи (в этом случае используются датчики 12 и 13) или не охватывать (датчики 10 и 11). Это дает возможность создать различные структуры следящих систем управления приводамиw Передача крутящих моментов с двигателя 5 на двигатель 6 и обратно осуществляется редуктором I, имеющим передаточное отношение, равное 1. Двигатель 14 осуществляет имитацию усилий резания за Счет изменения нагрузки на колесо 3. Закон изменения нагрузки задается системой 15 управления. Исследование бесцентрово-токарных станков, особенностью которых является периодический обрыв и восстановление кинематической цепи между приводами, производится с помощью включения и отключения электромагнитной муфты 9 управляемой системой 15 управления.
В результате на стенде можно создать адекватную модель работы двух- двигательного привода любого типа станков и проводить исследования влияния всех существенных параметров работы станка на согласованнуво работу приводов.
Формула изобретения
Стенд дпя исследования приводов станков, содержащий первый исполнительный двигатель, кинематически связанньм через первое передаточное звено и редуктор с нагружа- .ющим устройством, отличающийся тем, что, с целью расширения функциональных возможностей, редуктор выполнен двухвходовым и в устройство введен второй исполнительный двигатель, связанный через второе передаточное звено с вторым входом редуктора, в качестве первого и второго передаточных звеньев использованы торсионы, между первым исполнительным двигателем и первым переда- точньш звеном введена электромагнитная муфта, а на валах двигателей и редуктора установлены датчики угловых положений.
Тираж 799
Подписное
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВИЗУАЛЬНОЙ БРАКОВКИ ПОЛОТНИЩЕОБРАЗНОГО МАТЕРИАЛА | 1991 |
|
RU2024664C1 |
| АДАПТИВНАЯ СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2239576C2 |
| Стенд для испытания электроприводов | 2020 |
|
RU2737738C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ ПЕРЕДАТОЧНОГО МЕХАНИЗМА ПРИВОДА АЭРОДИНАМИЧЕСКОГО РУЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2158909C1 |
| Система управления приводом портала машины термической резки | 1989 |
|
SU1692781A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |
| Стенд для испытания гидравлических фрикционных муфт коробки передач | 1983 |
|
SU1139991A1 |
| Стенд для испытания передач | 1981 |
|
SU976323A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ | 2017 |
|
RU2643903C1 |
| МЕХАНИЗМ ПРИВОДА УПРАВЛЯЮЩЕГО УСТРОЙСТВА | 2024 |
|
RU2826171C1 |
Изобретение относится к станко строению, в частности к стендам для исследования двухдвигательных приводов станков. Целью изобретения является расширение функциональных возможностей стенда. Исполнительные двигатели (ид) 5 и 6 связаны с редуктором 1 через торсионы (Т) 7 и 8. С колесом 3 редуктора 1 связан дополнительный двигатель 14, осуществляющий имитацию усилий резания. Путем смены Т 7 и 8 устанавливают требуемую жесткость кинематической связи между ИД 5 и 6. При установке неодинаковых Т 7 и 8 имитируется несимметричное положение режущего инструмента относительно ИД 5 и 6. Электромагнитная муфта 9, связанная с системой управления (СУ) 15, служит для периодического обрыва и восстановления кинематической цепи. Датчики положения 10, 11, 12 и 13 установлены на валах ИД 5 и 6 и валах колес 2 и 4 редуктора 1, и связаны с СУ 15. 1 ил. (С СЛ С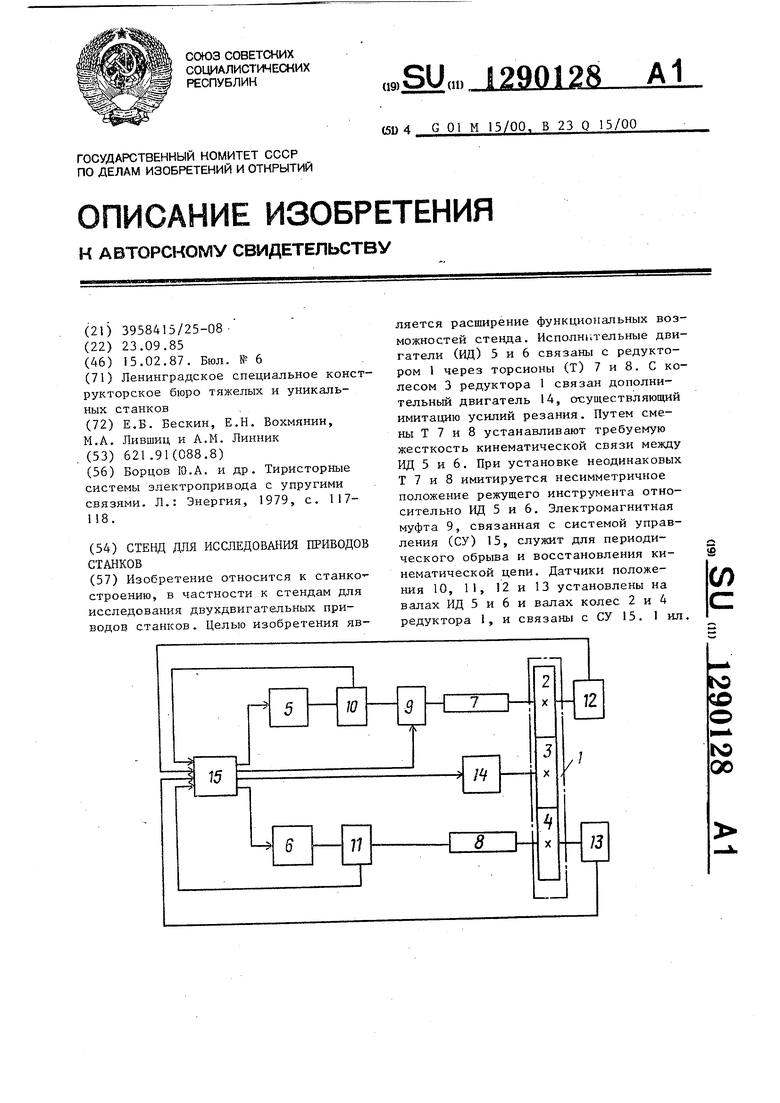
| Борцов Ю.А | |||
| и др | |||
| Тиристорные системы электропривода с упругими связями | |||
| Д.: Энергия, 1979, с | |||
| Аппарат для испытания прессованных хлебопекарных дрожжей | 1921 |
|
SU117A1 |
