Изобретение относится к транспортному машиностроению, в частности к тормозным системам автомобильных и тракторных поездов, состоящих из тягача и полуприцепного или прицепного звеньев.
Известен способ регулирования тормозных сил, реализуемый в тормозной системе транспортного средства, согласно которому производится регулирование давления в приводных цилиндрах в зависимости от межосевого и межбортового перераспределения нагрузок на колесах транспортного средства. Однако данный способ оказывается малоэффективным при применении его на автопоездах, так как в его работе не учитывается наличие курсового угла между звеньями поезда и, следовательно, действие поперечной составляющей силы, воздействующей на тягач со стороны прицепного звена, которая стремится нарушить траекторную устойчивость движения автопоезда при его торможении и ведет к складыванию автопоезда.
Наиболее близким техническим решением, выбранным в качестве прототипа, является способ регулирования тормозных сил на колесах транспортного средства, при котором измеряют угол складывания секций шарнирно сочлененного транспортного средства и снижают приводное давление в тормозных камерах, внутренних по отношению к траектории движения колес, пропорционально величине угла складывания, а при отрыве внутренних колес от поверхности дороги в тормозных камерах наружных колес полностью снимают приводное давление.
Однако этот способ имеет следующие недостатки. Опыт эксплуатации сочлененных транспортных средств показывает, что при торможении в их соединительных устройствах практически всегда возникает сила взаимодействия звеньев, которая обусловлена различным временем срабатывания тормозного привода осей транспортного средства, весовыми состояниями звеньев, наличием зазоров в сцепном устройстве и другими факторами. Указанный способ данные взаимодействия не учитывает. Кроме того, при реализации этого способа между звеньями сочлененного транспортного средства помимо взаимодействий, обусловленных инерционными силами, дополнительно проявляются взаимодействия, возникающие в результате неравенства тормозных сил, которые реализуются на наружных и внутренних (по отношению к траектории движения) колесах транспортного средства, так как при торможении в процессе поворота на внутренних колесах тормозные силы ограничиваются, а на наружных продолжается увеличение значений действующих тормозных сил. Действие на звенья транспортного средства вышеуказанных сил приводит к возникновению моментов, стремящихся развернуть звенья сочлененной машины. При этом в общем случае действие этих моментов взаимно не уравновешивается, что видно из схемы сил и боковых реакций, действующих на тормозящееся транспортное средство при наличии между звеньями курсового угла.
Кроме того, к недостаткам данного способа следует отнести и то, что торможение звеньев транспортного средства производится с меньшей эффективностью, чем это возможно, вследствие того, что тормозные силы на колесах звеньев регулируются в равной степени, учитывая только "бортовое" или поперечное распределение веса между внутренними и наружными, по отношению к траектории движения колесами и не учитывается продольное перераспределение веса между звеньями, что как известно оказывает большое влияние на устойчивость транспортного средства. Кроме того, в указанном способе предлагается закон пропорционального изменения приводного давления в тормозных камерах колес в зависимости от курсового угла звеньев транспортного средства. Однако, учитывая, что в большой степени на устойчивость транспортного средства в этом случае оказывают влияние его скорость и состояние дорожного покрытия, то очевидно, что такая зависимость будет подчиняться другому закону, являясь функцией многих переменных, т.е. должна быть нелинейной.
Целью изобретения является повышение траекторной устойчивости автомобильных и траекторных поездов при их торможении за счет совершенствования процесса торможения.
Это достигается тем, что измеряют угол складывания звеньев транспортного поезда (как имеющего подвеску, так и без подвески) и снижают приводное давление в тормозных камерах задней оси (тележки) тягача пропорционально величине косинуса угла складывания звеньев.
Сопоставительный анализ изобретения с прототипом показывает, что предлагаемый способ отличается от известного тем, что после измерения угла складывания звеньев транспортного средства приводное давление снижают в тормозных камерах только задней оси (тележки) тягача, причем приводное давление уменьшают пропорционально величине косинуса угла складывания звеньев. Таким образом, изобретение соответствует критерию "Новизна". Обеспечение предлагаемым способом соответствия регулируемого приводного давления в тормозных камерах задней оси тягача величине и направлению действия толкающего усилия со стороны прицепного звена позволяет сделать вывод о соответствии способа критерию "Существенные отличия".
Уменьшение приводного давления в тормозных камерах задней оси (тележки) тягача позволяет увеличить поперечную составляющую силы сцепления колес оси (тележки) с поверхностью дороги, предотвратить ее занос под действием толкающего усилия со стороны прицепа и предупредить складывание шарнирно сочлененного транспортного средства.
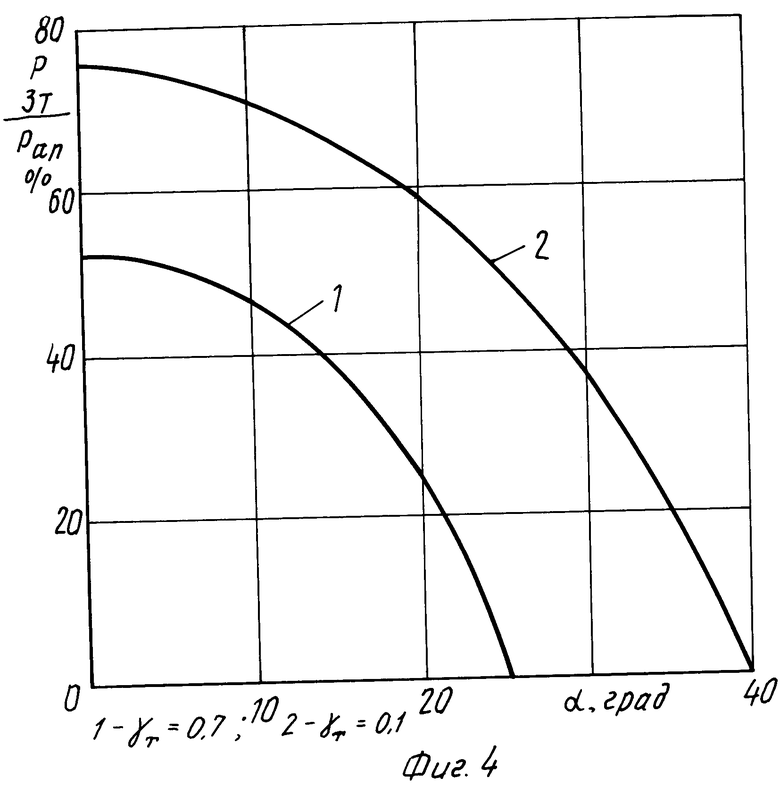
На фиг. 1 изображены силы, действующие на тормозящий автопоезд при наличии угла между продольными осями его звеньев; на фиг.2 - иллюстрация соотношения продольных и поперечных сил сцепления колеса с дорогой; на фиг. 3 - функциональная схема тормозного привода, реализующего предлагаемый способ; на фиг. 4 - иллюстрация изменения приводного давления в тормозных камерах задней оси (тележки) тягача (%) от давления в тормозном приводе поезда в зависимости от величины косинуса угла складывания звеньев поезда.
При торможении автопоезда в результате неодновременного срабатывания тормозного привода звеньев, их различных весовых состояний и т.д. в соединительном устройстве возникает сила Рп (см. фиг.1). При движении по криволинейной траектории боковая составляющая Рпу, действующая со стороны прицепа на тягач, стремится осуществить снос задней оси (тележки) тягача. Снос задней оси тягача, сопровождающийся складыванием автопоезда и потерей его управляемости и устойчивости, происходит в случае, если сила Рпу превышает боковую реакцию дороги Ry, реализуемую на колесах задней оси (тележки) тягача по условию сцепления. Известно, что боковую реакцию Ry, реализуемую в контакте колеса с дорогой, можно определить по зависимости
Rу=  (4) где ϕ - коэффициент сцепления;
(4) где ϕ - коэффициент сцепления;
Rz - нормальная реакция дороги;
Rx - продольная реакция дороги или тормозная сила колеса. Следовательно, устойчивое движение по криволинейной траектории сочлененного транспортного средства при его торможении будет обеспечено, если на задней оси тягача тормозные силы Rx не будут превышать предельных значений по условию устойчивого движения колеса (см. фиг.3).
Для реализации способа достаточно в контур привода тормозов задней оси тягача 1 установить регулятор (ограничитель приводного давления) 2 в тормозных камерах задней оси (тележки) тягача 3, управление которым осуществляют посредством его кинематической связи с датчиком-измерителем курсового угла звеньев автопоезда 4, который регистрирует угол взаимного расположения звеньев поезда транспортных средств в плоскости, параллельной поверхности дороги.
При торможении на прямолинейном участке дороги давление в тормозных камерах задней оси тягача не ограничивается. При входе транспортного средства в поворот между его звеньями возникает угол складывания. В соответствии с предлагаемым способом для предотвращения сноса задней оси тягача давление в ее тормозных камерах измеряют по зависимости (фиг.4)
Рзт = Рап ˙cos α, где Рзт - приводное давление в тормозных камерах задней оси (тележки) тягача;
Рап - приводное давление в тормозном приводе автопоезда;
α - угол складывания звеньев автопоезда, что обеспечивает выполнение условия
Rу=  с учетом перераспределения веса транспортного средства между его осями как в поперечном, так и в продольном направлении в процессе торможения при наличии угла складывания между звеньями транспортного средства.
с учетом перераспределения веса транспортного средства между его осями как в поперечном, так и в продольном направлении в процессе торможения при наличии угла складывания между звеньями транспортного средства.
Датчик, регистрирующий угол складывания звеньев автопоезда, может быть выполнен механическим с профилем, задающим требуемый закон изменения приводного давления (см. фиг.4). При этом датчик должен быть симметричным для обеспечения выполнения закона изменения приводного давления при повороте поезда транспортных средств в обе стороны. В качестве регулятора-ограничителя приводного давления может быть применен широко распространенный автоматический регулятор тормозных сил лучевого типа. Таким образом, в соответствии с изменяющимся углом складывания звеньев транспортного средства, совершающего процесс торможения на криволинейном участке дороги, происходит автоматическое снижение приводного давления в тормозных камерах задней оси тягача, что обеспечивает необходимое для сохранения траекторной устойчивости, увеличение боковой реакции дороги, реализуемой на задних колесах тягача. При этом уменьшение приводного давления тормозов задних колес тягача повышает общую эффективность торможения автопоезда, так как обеспечивается реализация максимально возможной суммарной реакции Rмакс= Rz˙ϕ по условиям сцепления колес с дорогой.
Использование предлагаемого способа позволяет приблизить характеристики тормозной системы поезда транспортных средств к оптимальным значениям с точки зрения устойчивости при торможении, так как обеспечивает некоторый запас устойчивости по боковому скольжению, предотвращает занос задних колес тягача.
В ходе проверочного расчета, проведенного для автопоезда КамАЗ-5410 с полуприцепом мод. 9370, используют следующие зависимости:
ΣRпу = Rпу(τ ) + Rпу(j), (5) где ΣRпу - суммарная поперечная сила в сцепке автопоезда, кн;
Rпу(τ) - поперечная сила, обусловленная действием инерционных сил при торможении автопоезда, кн;
Rпу(j) - поперечная сила, обусловленная действием центробежных сил при повороте автопоезда, кн.
Коэффициент поперечного сцепления колес с дорогой определяется
ϕу=  (6) где ΣRz2 - нормальная реакция, действующая на колеса задней тележки тягача при данном коэффициенте торможения
(6) где ΣRz2 - нормальная реакция, действующая на колеса задней тележки тягача при данном коэффициенте торможения
γт=  (7) где а - замедление автопоезда, м/c2;
(7) где а - замедление автопоезда, м/c2;
g - ускорение свободного падения, м/c2.
Предельное значение коэффициента продольного сцепления, которое можно реализовать при данном коэффициенте у, следующее:
ϕx=  (8) где ϕмакс - максимальное значение коэффициента сцепления колес с дорогой. Тогда предельное (по устойчивости к боковому скольжению задних колес тягача) значение тормозной силы на колесах тягача определяется из
(8) где ϕмакс - максимальное значение коэффициента сцепления колес с дорогой. Тогда предельное (по устойчивости к боковому скольжению задних колес тягача) значение тормозной силы на колесах тягача определяется из
Rx2ϕ=ϕx˙Σ Rz2 . (9)
Расчеты производились для значений угла складывания (курсового угла) α = 35о; 5о; 9о; 11о; 17о; 20о; 30о;
коэффициента торможения γт = 0,1; 0,2; 0,3; 0,4; 0,5; 0,6; 0,7; максимальное значение коэффициента сцепления принималось ϕмакс = 0,7.
Результаты расчета показывают, что в ходе торможения автопоезда с курсовым углом происходит уменьшение коэффициента продольного сцепления ϕх с 0,7 при α = 0о до 0,63 при α = 11о и ниже (0,39 при α = 20о) при коэффициенте торможения γт = 0,7, а при γт = 0,1 происходит уменьшение величины коэффициента продольного сцепления ϕх до 0,66 при α = 11о; 0,58 при α = 17о; 0,53 при α= 20о; 0,35 при α = 30о. Следовательно, с ростом курсового угла α вследствие уменьшения значений коэффициента продольного сцепления ϕх для предотвращения блокировки колес задней тележки тягача необходимо уменьшать и тормозные силы, развиваемые тормозными механизмами этих колес таким образом, чтобы их значение соответствовало реализуемому коэффициенту продольного сцепления ϕх при данном курсовом угле α. Это возможно сделать без уменьшения эффективности торможения автопоезда вследствие того, что в этих условиях существует избыток величины тормозных сил, невозможных к реализации на колесах тягача (происходит блокировка колес). При этом эффективность торможения не уменьшается, так как сцепление колес с дорогой реализуется полностью. В то же время существенно повышается безопасность движения на криволинейных участках дороги из-за увеличения запаса устойчивости по боковому скольжению колес, так как с уменьшением ϕх одновременно увеличивается коэффициент поперечного сцепления ϕу, что видно из выражения
ϕу=  (9) где ϕмакс - полный (максимальный) коэффициент сцепления. Кроме того, возросшую боковую реакцию дороги Ry, возможную к реализации, можно рассматривать фактически как тормозную силу, воздействующую со стороны автомобиля-тягача на накатывающийся на него полуприцеп. Следовательно, равнодействующая тормозных сил на колесах тягача и боковых реакций дороги не изменится ни по своей абсолютной величине, ни по направлению, а значит и эффективность торможения будет удовлетворять предъявляемым к тормозным системам требованиям.
(9) где ϕмакс - полный (максимальный) коэффициент сцепления. Кроме того, возросшую боковую реакцию дороги Ry, возможную к реализации, можно рассматривать фактически как тормозную силу, воздействующую со стороны автомобиля-тягача на накатывающийся на него полуприцеп. Следовательно, равнодействующая тормозных сил на колесах тягача и боковых реакций дороги не изменится ни по своей абсолютной величине, ни по направлению, а значит и эффективность торможения будет удовлетворять предъявляемым к тормозным системам требованиям.
Устойчивость автопоезда оценивают по показателю критической скорости Vкр.ϕ автопоезда по скольжению, которую определяют по выражению
vкр.ϕ= 3,13 (11) где ϕу - коэффициент поперечного сцепления;
(11) где ϕу - коэффициент поперечного сцепления;
R - радиус поворота автомобиля, м;
β - угол поперечного уклона дороги, град. Для упрощения расчетов β = 0о, тогда
vкр.ϕ= 3,13 (12) Используя данные произведенных расчетов, определяют критическую скорость по скольжению для автопоезда с тормозной системой штатной и с регулированием тормозных сил в зависимости от курсового угла α = 3,5о, 5о, 9о, 11о, 20о при γт = 0,7. Расчеты показывают, что при реализации предлагаемого способа критическая скорость по скольжению увеличивается по сравнению с автопоездом со штатной тормозной системой на 6-10% при малых (3-5о) курсовых углах и до 55% при средних и больших курсовых углах (11-20о), а следовательно, повышается и устойчивость движения поезда транспортных средств, в процессе торможения при наличии курсового угла между звеньями поезда увеличивается средняя скорость движения и производительность поезда транспортных средств.
(12) Используя данные произведенных расчетов, определяют критическую скорость по скольжению для автопоезда с тормозной системой штатной и с регулированием тормозных сил в зависимости от курсового угла α = 3,5о, 5о, 9о, 11о, 20о при γт = 0,7. Расчеты показывают, что при реализации предлагаемого способа критическая скорость по скольжению увеличивается по сравнению с автопоездом со штатной тормозной системой на 6-10% при малых (3-5о) курсовых углах и до 55% при средних и больших курсовых углах (11-20о), а следовательно, повышается и устойчивость движения поезда транспортных средств, в процессе торможения при наличии курсового угла между звеньями поезда увеличивается средняя скорость движения и производительность поезда транспортных средств.
| название | год | авторы | номер документа |
|---|---|---|---|
| АНТИБЛОКИРОВОЧНАЯ АНТИЗАНОСНАЯ ТОРМОЗНАЯ СИСТЕМА АЗОВО-ЧЕРНОМОРСКОЙ АГРОИНЖЕНЕРНОЙ АКАДЕМИИ ДЛЯ АВТОПОЕЗДОВ | 2002 |
|
RU2221716C1 |
| ТОРМОЗ ПРИЦЕПА | 2019 |
|
RU2729334C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ТОРМОЖЕНИЕМ АВТОПОЕЗДА | 2005 |
|
RU2299140C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ ЗАНОСА АВТОПОЕЗДА | 2012 |
|
RU2507079C1 |
| АВТОМОБИЛЬНЫЙ ПОЛУПРИЦЕП | 2003 |
|
RU2254246C1 |
| ПРОТИВОЗАНОСНАЯ ТОРМОЗНАЯ СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2113364C1 |
| Тормоз наката с устройством стабилизации прямолинейного движения одноосного прицепа | 2024 |
|
RU2825212C1 |
| БОЛЬШЕГРУЗНЫЙ АВТОПОЕЗД | 2003 |
|
RU2255018C1 |
| ДВОЙНОЙ ТОРМОЗНОЙ МЕХАНИЗМ СО СПАРЕННЫМИ ТОРМОЗНЫМИ КАМЕРАМИ | 2001 |
|
RU2221714C2 |
| АВТОМОБИЛЬНЫЙ ПОЛУПРИЦЕП | 2009 |
|
RU2397892C1 |
Использование: в транспортном машиностроении, в частности в тормозных системах автомобильных или тракторных поездов, состоящих из тягача и полуприцепного или прицепного звеньев. Сущность изобретения: способ включает измерение угла складывания звеньев транспортного средства и снижение приводного давления в тормозных камерах задних осей /оси/ тягача пропорционально косинусу угла складывания. Реализация способа осуществляется путем включения в контур привода тормозов задних осей тягача ограничителя приводного давления /регулятора/, управление которым осуществляется от датчика, измеряющего угол складывания звеньев и выдающего требуемый управляющий сигнал. 4 ил.
СПОСОБ РЕГУЛИРОВАНИЯ ТОРМОЗНЫХ СИЛ НА КОЛЕСАХ ТРАНСПОРТНОГО СРЕДСТВА, заключающийся в измерении и снижении приводного давления в тормозных камерах колес транспортного средства на повороте, отличающийся тем, что снижение приводного давления в тормозных камерах задних осей или оси тягача сочлененного транспортного средства проводят после измерения угла складывания его звеньев по косинусоидальному закону в функции от угла складывания.
| Тормозная система транспортного средства | 1980 |
|
SU878628A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
