2. Способ по п. 1, отличающийся тем, что поворот управляемых колес ведомого звена осуществляют на угол поворота в соответствии с выражением
D-x
:. R°fARD t 4L, ;
и/,, - продольные расстояния от центра шарнира сочленения до осей соответственно заднего моста тягача и управляемых колес прицепа;
%()o ; uR-.R-ajP.y;
di, .
де X и Д R - соответственно продольное смещение мгновенного центра скоростей и приращение радиуса поворота от положения, заданного в статике «з - постоянные коэффициен ты;
Р и V - соответственно составляющая тяговой нагрузки, действующая в шарнире сочленения, и угол складывания; t, и Ы,, - соответственно база и
угол поворота управляемых колес тягача. 3. Устройство для осуществления пособа по пп, 1 и 2, содержащее
датчик угла поворота колес ведущего эвена, датчик угла складывания ведущего и ведомого звеньев, а также механизм поворота управляемых колес ведомого звена, отличающеес я тем, что оно снабжено устройством, содержащим блоки задания постоянных коэффициентов, датчик измерения угла .складывания, блоки умножения, сумматоры, блок задания коэффициента, равного единице, датчик тягового усилия, блок-деления и датчик измерения угла поворота управляемых колес ведущего звена, причем механизм поворота связан с блоком умножения, выходы которого соединены с блоком.задания постоянных коэффициентов, датчиком измерения угла поворота управляемых колес ведущего звена и блоком деления, а входы блока деления связаны с выходами сумматоров, входы которых соединены с выходами блоков умножения и блоком Задания коэффициента, равного единице, входы блоков умножения связаны с выходами датчика тягового усилия и одного из них-с выходом сумматора, а другого - с выходами блока задания постоянных коэффициентов и датчика измерения угла складывания, а входы последнего сумматора связаны с выходами блока задания постоянных коэффициентов и блока умножения, соответствующие входы которого связаны с выходами датчика измерения угла складывания и блока задания постоянных коэффициентов.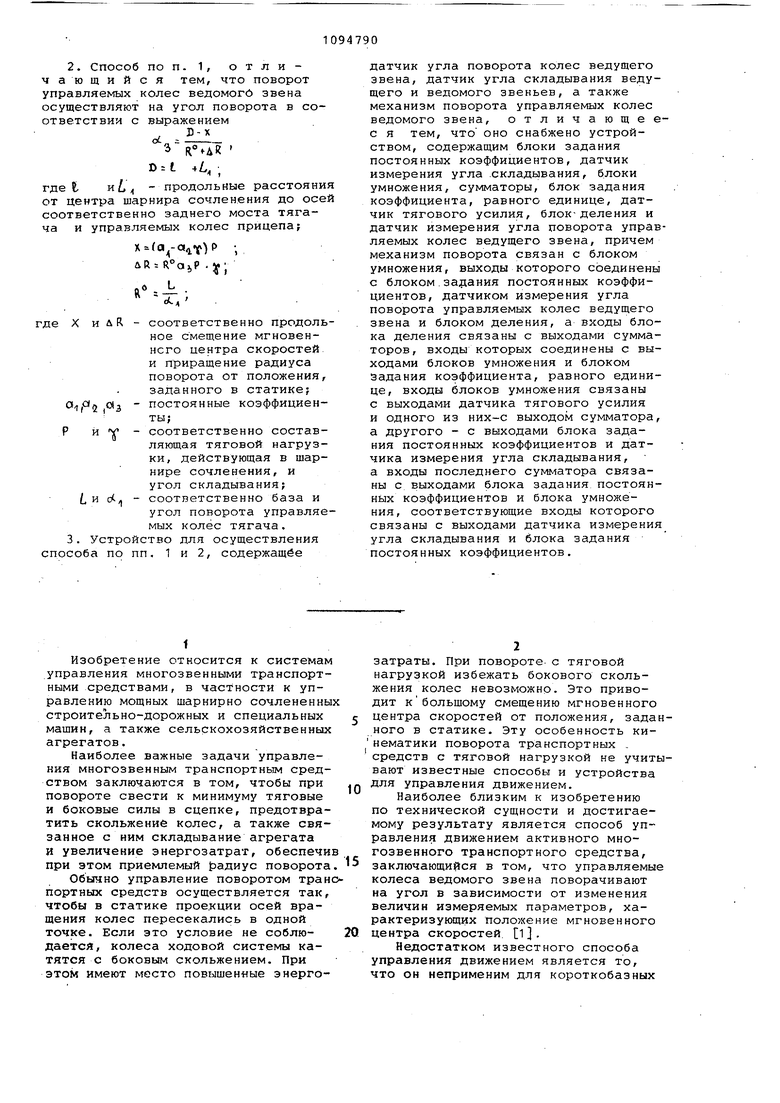



| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования частоты вращения тяговых двигателей прицепа транспортного средства | 1981 |
|
SU1004169A2 |
| Устройство для регулирования частоты вращения тяговых двигателей прицепа | 1979 |
|
SU935332A2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СОЧЛЕНЁННОГО ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2601077C1 |
| Устройство для управления поворотом ведомого звена автопоезда | 1985 |
|
SU1311989A1 |
| Устройство управления движением прицепных звеньев безрельсового транспортного средства | 1984 |
|
SU1318472A1 |
| Устройство управления автопоездом | 1988 |
|
SU1655833A1 |
| Устройство для автоматической блокировки вертикального шарнира сцепки тягача с прицепным звеном | 1987 |
|
SU1411203A1 |
| Двухзвенное транспортное средство | 1987 |
|
SU1426864A1 |
| Способ идентификации максимальных значений коэффициентов трения скольжения колёс автомобиля и прицепа в составе системы управления движением автопоезда | 2023 |
|
RU2811997C1 |
| ТРАНСМИССИЯ СОЧЛЕНЁННОГО НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2524205C1 |

1. Способ управления движением активного многозвенного транспортно,1.0 го средства, заключающийся в том, что управляемые колеса ведомого звена поворачивают на угол в зависимости от изменения величин измеряемых параметров, характеризующих положение мгновенного центра скоростей, отличающийся тем, что, с целью снижения энергозатрат при повороте транспортного средства и уменьшения бокового скольжения колес ведомого звена за счет точного согласования кинематики поворота ведущего и ведомого звеньев, измеряют угол складывания звеньев и тяговую нагрузку.в шарнире сочленения, определяющие продольное смещение мгновенного центра скоростей относитель-§ но положения, заданного в статике, (Л и поворачивают управляемые колеса ведомого звена на угол, при котором с оси вращения этих колес проходят через мгновенный центр скоростей. со 4 -Ч СО
1
Изобретение относится к системам управления многозвенными транспортными средствами, в частности к управлению мощных шарнирно сочлененны строительно-дорожных и специальных мащин, а также сельскохозяйственных агрегатов.
Наиболее важные задачи управления многозвенным транспортным средством заключаются в том, чтобы при повороте свести к минимуму тяговые и боковые силы в сцепке, предотвратить скольжение колес, а также связанное с ним складывание агрегата И увеличение энергозатрат, обеспечи при этом прие ллемый радиус поворота
Обычно управление поворотом транпортных средств осуществляется так, чтобы в статике проекции осей вращения колес пересекались в одной точке. Если это условие не соблюдается, колеса ходовой системы катятся с боковым скольжением. При этом имеют место повышенные энергозатраты. При повороте, с тяговой нагрузкой избежать бокового скольжения колес невозможно. Это приводит кбольшому смещению мгновенного центра скоростей от положения, заданого в статике. Эту особенность кинематики поворота транспортных . средств с тяговой нагрузкой не учитвают известные способы и устройства для управления движением.
Наиболее близким к изобретению по технической сущности и достигаемому результату является способ управления движением активного многозвенного транспортного средства, заключающийся в том, что управляемы колеса ведомого звена поворачивают на угол в зависимости от изменения величин измеряемых параметров, характеризующих положение мгновенного центра скоростей 1.
Недостатком известного способа управления движением является то, что он неприменим для короткобазных
тягачей и сочлененных с ними прицепов с активными колесами, у которых углы складывания большие. При таком способе управления в процессе поворота мгновенный центр скоростей может занимать произвольное положение. Произвольно изменяется при этом также соотношение радиусов поворота колес тягача и прицепа, а следовательно, их буксование и касательные силы тяги, а колеса транспортного средства могут катится с боковым скольжением. Управление движением в соответствии с этим способом при блокированном межосевом приводе может привести к появлению на колесах отстающего моста отрицательных касательных сил тяги, а при дифференциальном - к резкому изменению последних и последующей пробуксовке колес одного моста и остановке транспортного средства. При повороте с тяговой нагрузкой, когда велики углы увода колес тягача и прицепа, данный способ управления движением не позволяет получить совпадения траекторий движения их колес.
Известно устройство для осуществления способа, содержащее датчик угла поворота колес ведущего звена, датчик угла складывания ведущего и ведомого звеньев, а также механизм поворота управляемых колес ведомого звена С2.
Недостатком известного устройства является то, что поворот транспортного средства происходит с боковым, а при блокированном межосевом приводе и с продольным скольжением колес. Кроме того, устройство не корректирует кинематику поворота при изменении тяговой нагрузки.
изобретения является снижение энергозатрат при повороте сочлененного транспортного средства с.тяговой нагрузкой, уменьшение бокового скольжения колес прицепа за счет точного согласования кинематики пов.орота ведущего и ведомого звеньев.
Указанная цель достигается тем, что согласно способу управления движением активного многозвенного транспортного средства, заключающемуся в том, что управляемые колеса ведомого звена поворачивают на угол в зависимости от изменения величин измеряемых параметров, характеризующих положение мгновенного центра ско ростей, измеряют угол складывания звеньев и тяговую нагрузку в шарнире сочленения, определяющие продольное смещение мгновенного центра скоростей относительно положения, заданного в статике, и поворачивают управляемые колеса ведомого звена на угол, при котором оси вращения
этих колес проходят через мгновенный центр скоростей.
Причем поворот управляемых колес ведомого звена осуществляют на угол поворота в соответствии с выражением
.--
где ) tfL,:
t и L - продольные расстояния от 0 центра шарнира сочленения до осей соответственно заднего моста тягача и управляемых колес прицепа;
x()P i /iR RV-Y.
5
иди.- соответственно прогде X дольное смещение мгно0венного- центра скороС тей и приращени радиуса поворота от положения, заданного в статике;
5
постоянные коэффициен0(,0(«.С(
l.
t/ ты;
р
Y соответственно тяговая нагрузка, действующая в шарнире сочленения,
0 и угол складывания;
соответственно база и
и угол поворота управляемых колес ведущего 1звена.
5
Устройство для реализации предлагаемого способа управления, содержащее датчик угла поворота колес ведущего звена, датчик угла складывания ведущего и ведомого звеньев,
0 а также механизм поворота управляемых колес ведомого звена, снабжено устройством, содержащим блоки за- Дания постоянных коэффициентов, датчик измерения угла складывания, ,блоки умножения, сумматоры, блок
5 задания коэффициента, равного единице, датчик тягового усилия, блок деления и датчик измерения угла поворота управляемых колес ведущего звена, причем механизм поворота
0 связан с блоком умножения, выходы которого соединены с блоком задания постоянных коэффициентов, датчиком измерения угла поворота управляемых колес ведущего звена и
5 блоком деления, а входы блока деления связаны с выходами сумматоров входы KOTopfcJx соединены с выходами блоков умножения и блоком задания коэффициента, равного единице, вхо0ды блоков умножения связаны с выходами датчика тягового усилия и одного из них - с выходом сумматора, а другого - с выходами блока задания постоянных коэффициентов и датчика измерения угла складывания.
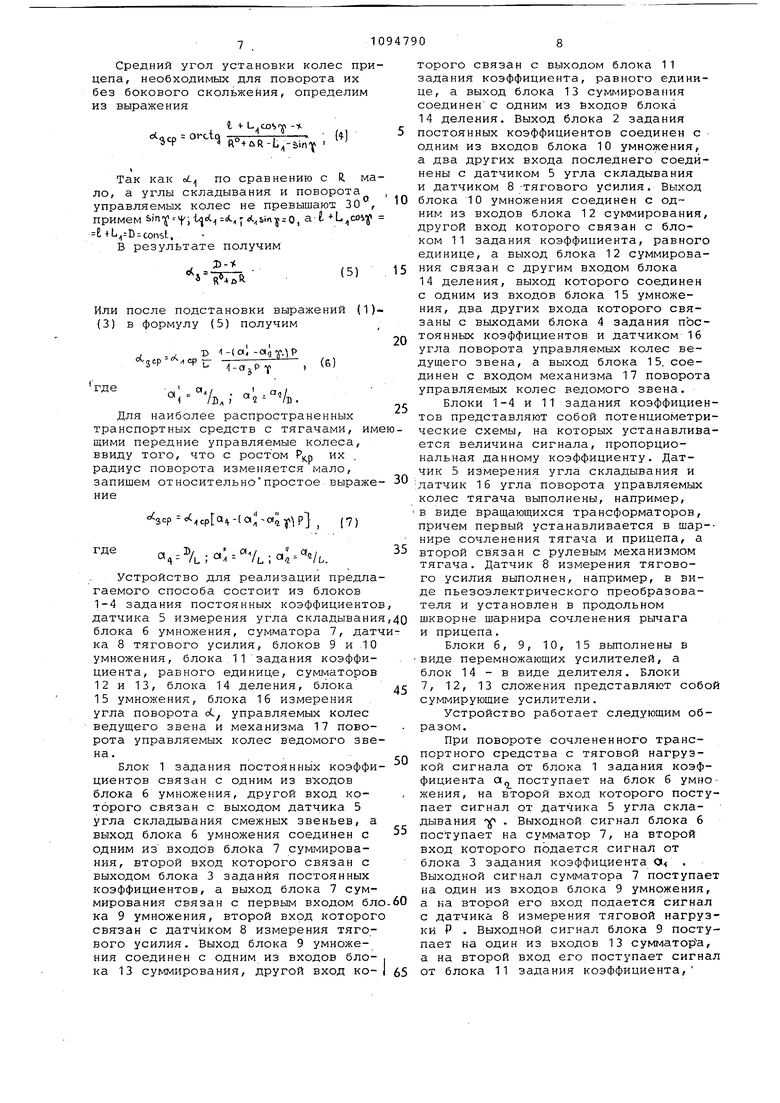
5 а входы послелнего сумматора свяэа ны с выходами блока задания постоя ных коэффициентов и блока умножени соответствующие входы которого свя заны с выходами датчика измерения угла складывания и блока задания постоянных коэффициентов. На фиг. 1 изображены зависимости продольного смещения мгновенного центра скоростей и угла складывания сочлененного транспортного агрегата от тяговой нагрузки в сце ном устройстве на фиг. 2 - кинема тическая схема поворота сочлененно го транспортного средства; на фиг. 3 - блок-схема устройства для управления движением в соответстви с предложенным способом управления Экспериментальная проверка пред ложенной гипотезы поворачиваемости выполнена с помощь1о двухосной мобильной установки с колесами 11/10 массой 5,5 т, базой 2,4 м и колеей 2 м. В межосевом приводе устанавли вали либо раздаточную коробку со ступенчато регулируемым кинематическим несоответствием в приводе мостов г либо межосевой дифференциал В процессе экспериментов изменяли также распределение массы по мостам от доли ее X 0,6 на передний мос до Я 0,4 и углы поворота передни и задних колес до 30 . Поворот осу Е ествляли таким образом, чтобы кол са тормозной установки, создающей тяговую нагрузку, двигались по следу мобильной установки. Такой способ организации поворота наибол предпочтителен для сочлененного транспортного средства, которое моделировали в процессе эксперимен тов. Результаты этих экспериментов частично приведенные на фиг. 1 для мобильной установки с межосевым диф ференциальным приводом Л. 0,6 и передними управляемь 1ми колесами (угол поворота внешнего колеса oi 2 внутреннего d 24), показывают, что при Х 0,4-0,6 с увеличением тяговой нагрузки Р растет продольное смещение центра скоростей, достигая при Р 15 кН значений X 2,0 м, близких к длине базы установки. Смещение X. особенно велико, если нагрузка на задний мост тягача мала.. Увеличивается также радиус поворота мобильной установки с R 6,23 м при Р О и до R 7,16 м при Р 13,86 кН. Так как с увеличением тяговой нагрузки мгно венный центр скоростей смещался назад, водитель тормозной установки, ведя ее по следу тягача (мобильной установки) , уменьпает угол складывания с 20 при Р 4 кН до у 8 при Р 13,86 кП. При заданной тяговой нагрузке с уменьшением угла у продольное смещение мгновенного центра скоростей растет (см. штриховые линии). Объясняется это тем, что поперечная составляющая тяговой нагрузки, действующей в шарнире сочленения к центру скоростей поворота, создает момент вызывающий поворот корпуса тягача и продольное смещение центра скоростей вперед по ходу движения. Поперечная составляющая Р sin ip , действующая в противоположном направлении, вызывает противоположные углы увода и смещение центра скоростей назад по ходу движения. Боковые реакции-, действующие в контакте колес с почвой вызывают их боковой увод. Если на заднем колесе тягача боковая реакция направлена к центру, то мгновенный центр скоростей смещается вперед, а если в противоположную сторону, то назад. Результирующее соотношение углов бокового увода и поворот контактного отпечатка определяют, таким oбpaз oм,. положение мгновенного центра скоростей. Это соотношение зависит от параметров ходовой системы транспортного средства и для каждого конкретного случая должно быть определено особо. Однако в целом эксперименты показывают, что с увеличением и расстояния 1 вследствие того, что растут отклоняющие моменты, увеличивается положительное продольное смещение X в сторону передних колес, а с уменьшением у и L растут по абсолютной величине отрицательные смещения К за задние колеса в сторону прицепа. Для исследованных ходовых систем зависимость х () ,) может быть аппроксимирована выражением х аР о с а, - а где ( (K(f - постоянные коэффициенты. Эксперименты показали, что с ростом тяговой нагрузки в щарнире сочленения до &к:р 0,3 от веса тягача радиус поворота при передних управляемых колесах увеличивается в 1,1-1,2 раза, а при задних - в 1,8-2,0 раза. Объясняется это тем, что у сочлененного тре.нспортного средства с задними управляемыми колесами в силу особенностей кинематики поворота гораздо больше углы складывания, чем с передними управляемыми колесами тягача. Таким образом, приращение радиуса поворота является функцией поперечной составляющей тяговой нагрузки sin-y (8) Средний угол установки колес при цепа, необходимых для поворота их без бокового скольжения, определим из выражения ft°+uR-L -eiflY Так как о(- по сравнению с И, ма ло, а углы складывания и поворота управляемых колес не превышают 30 , примем ,, - iiilf O, а 4 E+L --Dxconst. В результате получим Или после подстановки выражений (1) (3) в формулу (5) получим , .. -D -(q, .p J,p,. .- (g, С rt ЛП CD l-OjP Y Х Х; « /1. Для наиболее распространенных транспортных средств с тягачами, им щими передние управляемые колеса, ввиду того, что с ростом Рцр их радиус поворота изменяется мало, запишем относительнопростое выраже ние .;|-oi;y4p} (7) а . а f п ч- L т 1 - /L ; ii /L-. Устройство для реализации предла гаемого способа состоит из блоков 1-4 задания постоянных коэффициенто датчика 5 измерения угла складывани блока б умножения, сумматора 7, дат ка 8 тягового усилия, блоков 9 и 10 умножения, блока.11 задания коэффициента, равного единице, сумматоров 12 и 13, блока 14 деления, блока 15 умножения, блока 16 измерения угла поворота с. управляемых колес ведущего звена и механизма 17 поворота управляемых колес ведомого зве на.. Блок 1 задания постоянных коэффи циентов связан с одним из выходов блока 6 умножения, другой вход которого связан с выходом датчика 5 угла складывания смежных звеньев, а выход блока 6 умножения соединен с одним из входов блока 7 суммирования, второй вход которого связан с выходом блока 3 задания постоянных коэффициентов, а выход блока 7 суммирования связан с первым входом бл ка 9 умножения, второй вход которог свя-зан с датчиком 8 измерения тягового усилия. Выход блока 9 умножения соединен с одним из входов блока 13 суммирования, другой вход которого связан с выходом блока 11 задания коэффициента, равного единице, а выход блока 13 суммирования соединен с одним из входов блока 14 деления. Выход блока 2 задания постоянных коэффициентов соединен с одним из входов блока 10 умножения, а два других входа последнего соединены с датчиком 5 угла складывания и датчиком 8 -тягового усилия. Выход блока 10 умножения соединен с одним из входов блока 12 суммирования, другой вход которого связан с блоком 11 задания коэффициента, равного единице, а выход блока 12 суммирования связан с другим входом блока 14 деления, выход которого соединен с одним из входов блока 15 умножения, два других входа которого связаны с выходами блока 4 задания постоянных коэффициентов и датчиком 16 угла поворота управляемых колес ведущего звена, а выход блока 15. соединен с входом механизма 17 поворота управляемых колес ведомого звена. Блоки 1-4 и 11 задания коэффициентов представляют собой потенциометрические схемы, на которых устанавливается величина сигнала, пропорциональная данному коэффициенту. Датчик 5 измерения угла складывания и датчик 1 б угла поворота управляемых колес тягача выполнены, например, В виде вращающихся трансформаторов, причем первый устанавливается в шар-нире сочленения тягача и прицепа, а второй связан с рулевым механизмом тягача. Датчик 8 измерения тягового усилия выполнен, например, в виде пьезоэлектрического преобразователя и установлен в продольном шкворне шарнира сочленения рычага и прицепа. Блоки 6, 9, 10, 15 выполнены в виде перемножающих усилителей, а блок 14 - в виде делителя. Блоки V, 12, 13 сложения представляют собой суммирующие усилители. Устройство работает следующим образом. При повороте сочлененного транспортного средства с тяговой нагрузкой сигнала от блока 1 задания коэффициента аг, поступает на блок б умножения, на второй вход которого поступает сигнал от датчика 5 угла складывания Y Выходной сигнал блока 6 поступает на сумматор 7, на второй вход которого подается сигнал от блока 3 задания коэффициента О . Выходной сигнал сумматора 7 поступает на один из входов блока 9 умножения, а ка второй его вход подается сигнал с датчика 8 измерения тяговой нагрузки Р . Выходной сигнал блока 9 поступает на один из входов 13 сумматора, а на второй вход его поступает сигнал от блока 11 задания коэффициента, равного единице. Выходной сигнал с матора 13 поступает на один из вхо дов активного делителя 14. Одновременно сигнал от блока 2 задания оэффициента поступает на вход блока 10 умножения, на два других входа поступает сигнал от датчика 8 измерения тягового усилия Р и от датчика 5 измерения угла . Выхо ной сигнал блока 10 поступает на вход сумматора 12, на другой из вхо дов которого подаётся сигнал блока 11 задания коэффициента, равного ёдийице. Выходной сигнал блока 12 поступает на другой вход делителя 14, на выходе которого образуется сигнал, равный IJEil illf Этот сигнал поИ-ЯьРдается на один из входов блока 15 умножения, на два других входа которого поступают сигналы от блока 4 задания коэффициента БД и от датчи-. ка 16 измерения углА -. поворота управляемых колес ведомого звена.. На выходе блока J5 образуется сигнал. равный; )Р который ( +а$Р f поступает на привод 17 поворота управляемых колес прицепа, который и поворачивает эти колеса на соответствующий угол. Использование предложенного способа позволит уменьшить боковое скольжение колес прицепа и благодаря этому снизить энергозатраты на поворот, износ резины и повысить тягово-знёргетические показатели транспортного средства.
Фиг.З
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ управления поворотом прицеп-НыХ зВЕНьЕВ АВТОпОЕздА | 1979 |
|
SU844443A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления колесами звеньев автопоезда | 1976 |
|
SU653163A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
