

| название | год | авторы | номер документа |
|---|---|---|---|
| Каротажный подъемник | 1987 |
|
SU1506095A1 |
| Каротажный подъемник | 1986 |
|
SU1448034A1 |
| УСТРОЙСТВО ДЛЯ СПУСКА И ПОДЪЕМА СКВАЖИННЫХ ПРИБОРОВ | 1994 |
|
RU2087668C1 |
| Устройство для управления каротажным подъемником | 1988 |
|
SU1548420A1 |
| КАРОТАЖНЫЙ ПОДЪЕМНИК | 2001 |
|
RU2179636C1 |
| УСТРОЙСТВО ДЛЯ НАМОТКИ И/ИЛИ РАЗМАТЫВАНИЯ ГИБКОГО ДЛИННОМЕРНОГО МАТЕРИАЛА С РЕГУЛИРУЕМОЙ СКОРОСТЬЮ НАМОТКИ ИЛИ РАЗМАТЫВАНИЯ | 1992 |
|
RU2015764C1 |
| Устройство для глубокой перфорации скважины | 2020 |
|
RU2745088C1 |
| УСТРОЙСТВО ДЛЯ СПУСКА И ПОДЪЕМА СКВАЖИННЫХ ПРИБОРОВ | 2001 |
|
RU2179635C1 |
| СПОСОБ ГЛУБОКОЙ ПЕРФОРАЦИИ СКВАЖИН И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2299316C2 |
| Спуско-подъемное устройство каротажной станции | 1988 |
|
SU1544960A1 |
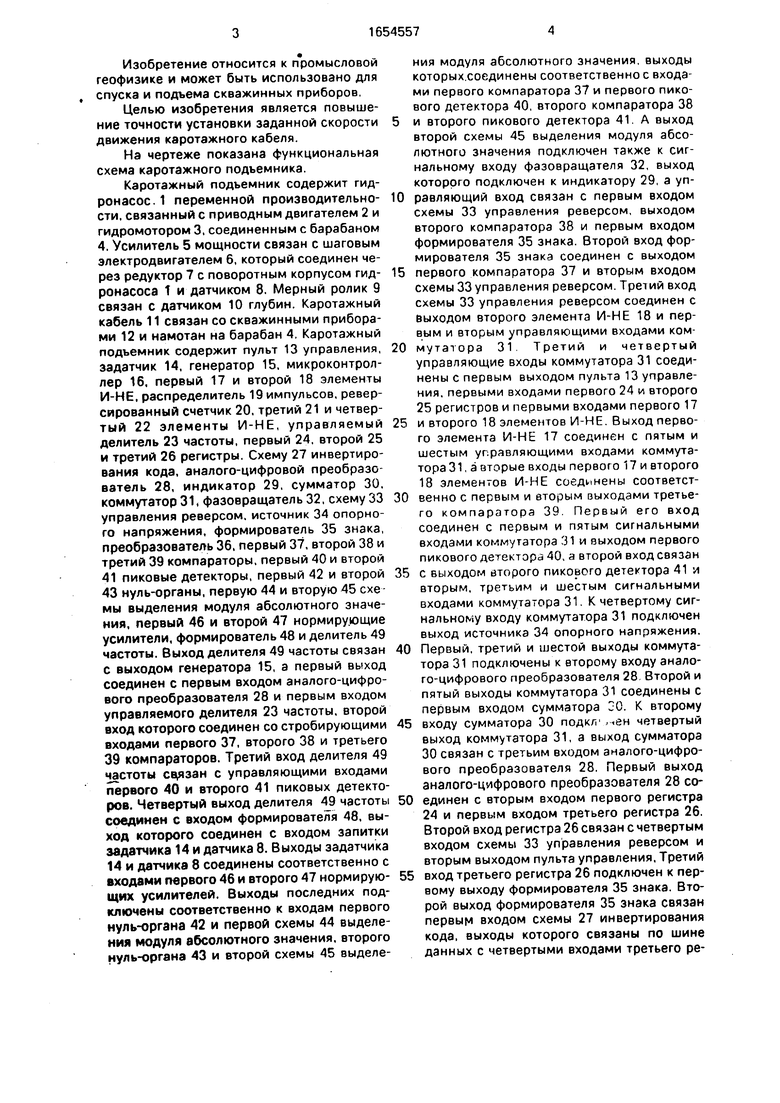
Изобретение относится к промысловой геофизике и может быть использовано для спуска и подъема скважинных приборов Цель изобретения повышение точности установки заданной скорости движения каротажного кабеля. Кабель содержит гидронасос 1, двигатель 2 и гидромотор 3 соединенный с барабаном 4 и имеет датчик 8, каротажный кабель 11. пульт 13 управления и задатчик 14. Система управления и частности включает в себя микрокошрол лер 16, первую и вторую схемы И-НЕ 17 и 18 реверсированный счетчик 20, делитель 3 частоты, аналого-цифровой преобразова тель 28, сумматор 30, коммутатор 31 пер вый 37, второй 38 и третий 39 компараторы нуль-органы 42 и 43 При переходе в ручной режим работы оператор при помощи задат чика 14, в качестве которого исгюльчую сельсин или вращающийся трансформатор задает угол на который должен повернуть ся поворотный корпус гидронасоса 1 для поддержанич необходимой скорости карп тажного к.аСелн 11 Поворот попоротого корпуса гидронасоса 1 осуществляется до гех пор пока yi/ювые положения 14 и датчик з 8 не совпадут 1 ил со с

| Каротажный подъемник | 1987 |
|
SU1506095A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
