Изобретение относится к измерительной технике и может быть использовано, например, в высокоточных навигационных системах топопривязчиков и транспортных средств, в том числе в системах для автоматического определения высоты, основанных на интегрировании синуса угла подъема местности вдоль пути.
Целью изобр.етения является повышение точности измерений.
На чертеже представлена структурная схема устройства.
Устройство для измерения угла наклона основания к зе.мной поверхности содержит первый 1 и второй 2 блоки датчиков, жестко установленных на основании под известными углами + и -5 соответственно Оси чувствительности первых 3 и вторых 4 датчиков неоднородностей поверхности каждого блока 1 и 2 параллельны, расположены в вертикально-продольной плоскости на известной мерной базе DI и D-2, а точки пересечения 5 и 6 осей чувствительности соответственно первых 3 и вторых 4 датчиков, принадлежаш,их к разным блокам датчиков 1 и 2, расположены вблизи земной поверхности 7.
Выходы блоков датчиков 1 и 2 соединены с входами соответственно первого 8 и второго 9 блоков определения транспортного запаздывания, выходы которых через сумматор 10 подключены к входу делителя блока деления 11.
Выходы первых 3 и вторых 4 датчиков, принадлежащих к разным блокам датчиков, подключены соответственно ко входам третьего 12 и четвертого 13 блоков определения транспортного запаздывания, выходы
сд
о
00
О
ел
которых соединены с прямым и инвертирующим входами блока вычитания 14, выход которого соединен с входом делимого блока деления 11.
Выход блока деления 1 через блок масштабного коэффициента 15, равного
-, и блок формирования угла наклона 16
соединен с выходной клеммой устройства.
Устройство реализует следующую зависимость:
a-arc/g -i-.,
tgy Т1 + Т2
где а - угол наклона основания транс- портного средства к земной поверхности;
7 - угол между основанием транспортного средства и базовым направлением первого (второго блока датчиков неоднородностей поверхности;
Qi,Q2 - транспортное запаздывание между одноименными (первыми, соответственно, вторыми) датчиками, принадлежащими к различным блокам датчиков {Q.,t - t2, ii t i-//-интервал времени между моментами прохождения неоднородности поверхности дороги через оси чувствительности датчиков первого и второго блока; - моменты прохождения неоднородности соответственно через ось чувствительности первого и второго датчиков блока.
Устройство работает следующим образом. При движении транспортного средства не- рвый 3 и второй 4 датчики первого блока датчиков 1 при прохождении неоднородности поверхности вырабатывают сдвинутые по времени сигналы в моменты /f и /Г, а первый 3 и второй 4 датчики второго блока датчиков 2 - в моменты t и t. Сигналы первого 3 и второго 4 датчика первого 1 и второго 2 блоков поступают, на входы соответственно первого 8 и второго 9 блоков определения транспортного запаздывания, на выходе которых формируют соответствен- но сигналы Т1 /Г-/Г и
Кроме того, сигналы первых 3 и соответственно вторых 4 датчиков, принадлежащих к разным блокам датчиков, поступают соответственно на входы третьего 12 и четвертого 13 блоков определения транспорт- ного запаздывания, на вь1ходе которых формируются сигналы и - tl. Для упрощения условий работы блоков определения транспортного запаздывания 12 и 13 высота установки датчиков 3, 4 и угол Y могут быть выбраны таким образом, чтобы
при любом максимально возможном угле наклона амакс и опускании основания к земной поверхности величины в и Эз сохраняли знак.
На выходе сумматора 10 по сигналам Ti и Т2 блоков 8 и 9 формируется сигнал Т1+Т2, а на выходе первого вычитателя 14 по сигналам Oi и 62 блоков 12 и 13 - сигнал 81-62.
В блоке деления 11 сигнал Gi-62 делится на Т|+Т2, после чего полученный сигнал
--- умножается в блоке масщтабного
TI+T2
коэффициента 15 на величину -- и поступает на вход блока формирования угла наклона 16, на выходе которого формируется сигнал, равный искомой величине угла наклона основания транспортного средства к земной поверхности а.
Формула изобретения
Устройство для измерения угла наклона основания транспортного средства к земной поверхности, содержащее первый и второй блоки датчиков неоднородностей поверхности, базовые направления которых составляют с основанием транспортного средства, выполненного с опорными точками, равные углы, оси чувствительности первого и второго датчика неоднородностей поверхности каждого блока расположены в вертикально-продольной плоскости перпендикулярно базовому направлению и параллельно одна другой, а выходы датчиков соединены с первым и вторым входами соответственно первого и второго блоков определения запаздывания, выходы которых через сумматор соединены с вторым входом блока деления, а выход блока вычитания через первый вход блока деления и блок масщтабного коэффициента соединен с входом блока формирования угла наклона, отличающееся тем, что, с целью повышения точности, оно снабжено третьим и четвертым блоками определения запаздывания, блоки датчиков неоднородностей поверхности закреплены на основании транспортного средства так, что точки пересечения осей чувствительности одноименных датчиков приближены к опорным точкам, при этом выходы первых датчиков соединен соответственно с первым и вторым входами третьего блока определения запаздывания, выход которого соединен с первым входом блока вычитания, а выходы вторых датчиков соединены соответственно с первыми и вторыми входами четвертого блока определения запаздывания, выход которого соединен с вторым входом блока вычитания.
ОС

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения положения основания транспортного средства относительно земной поверхности | 1991 |
|
SU1812425A1 |
| Устройство для измерения угла наклона основания транспортного средства к земной поверхности | 1986 |
|
SU1362929A1 |
| Устройство для измерения рельефа местности | 1986 |
|
SU1530897A1 |
| ИМИТАТОР ВИДИМОСТИ В СЛОЖНЫХ МЕТЕОРОЛОГИЧЕСКИХ УСЛОВИЯХ | 1991 |
|
RU2056646C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2012 |
|
RU2513667C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ЦЕЛЕУКАЗАНИЯ | 1995 |
|
RU2079109C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВ ОТКЛОНЕНИЯ ЗАДАННОГО НАПРАВЛЕНИЯ ОТ ВЕРТИКАЛИ И ПОПЕРЕЧНЫХ УСКОРЕНИЙ ПОСРЕДСТВОМ ГИДРОДИНАМИЧЕСКИХ ГИРОСКОПОВ, СПОСОБ ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ГИДРОДИНАМИЧЕСКОГО ГИРОСКОПА С АКСИАЛЬНЫМ СМЕЩЕНИЕМ ЦЕНТРА МАСС И СПОСОБ ОПРЕДЕЛЕНИЯ ЕГО ПЛАВУЧЕСТИ | 2004 |
|
RU2269097C1 |
| Устройство для автономного определения расстояния, пройденного наземным транспортным средством | 2021 |
|
RU2768547C1 |
| Устройство сбора информации о величинах динамических воздействиях на гибкие конструкции и состояние концевых оптоволоконных извещателей | 2016 |
|
RU2648008C1 |
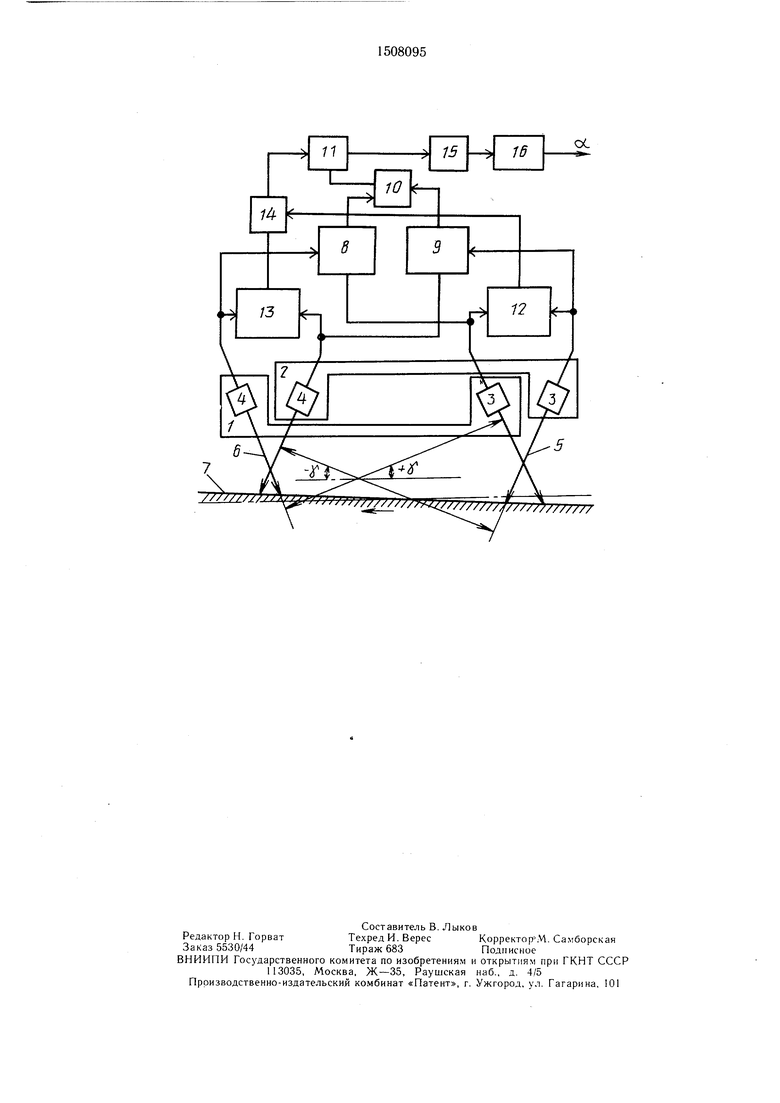
Изобретение относится к измерительной технике и может быть использовано, например, в наземных навигационных системах и системах автоматического определения высоты. С целью повышения точности блоки 1,2 датчиков 3,4 неоднородностей поверхности установлены на основании транспортного средства так, что точки пересечения осей чувствительности одноименных датчиков (3 или 4) расположены вблизи земной поверхности. Сигналы с датчиков 3,4 поступают на четыре блока определения транспортного запаздывания 8,9,12,13. Формируемая в блоке 14 разность транспортных запаздываний (блоки 12,13) делится в блоке деления 11 на сумму, формируемую в сумматоре 10 по данным блоков транспортного запаздывания 8 и 9. Сигнал с блока деления 11 поступает на вход блока масштабного коэффициента 15 и далее на вход блока 16 формирования угла наклона основания транспортного средства к земной поверхности. В устройстве оси чувствительности датчиков 3,4 каждого из блоков 1,2 расположены на известном расстоянии друг от друга под заданным углом к основанию транспортного средства. 1 ил.
| Белоглазое Н | |||
| Г | |||
| и др | |||
| Основы навигации по геофизическим полям | |||
| М.: Наука, 1985, с | |||
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения угла наклона основания транспортного средства к земной поверхности | 1986 |
|
SU1362929A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
