ел
00
Изобретение относится к измерительной технике и может быть использовано в системах измерения рельефа пройденного пути и высоты местности преимущественно для наземных транспортных средств.
Цель изобретения - упрощение устройства.
На фиг.1 представлена схема ускоре НИИ, воздействующих на акселерометры; на фиг,2 - структурная схема устройства.
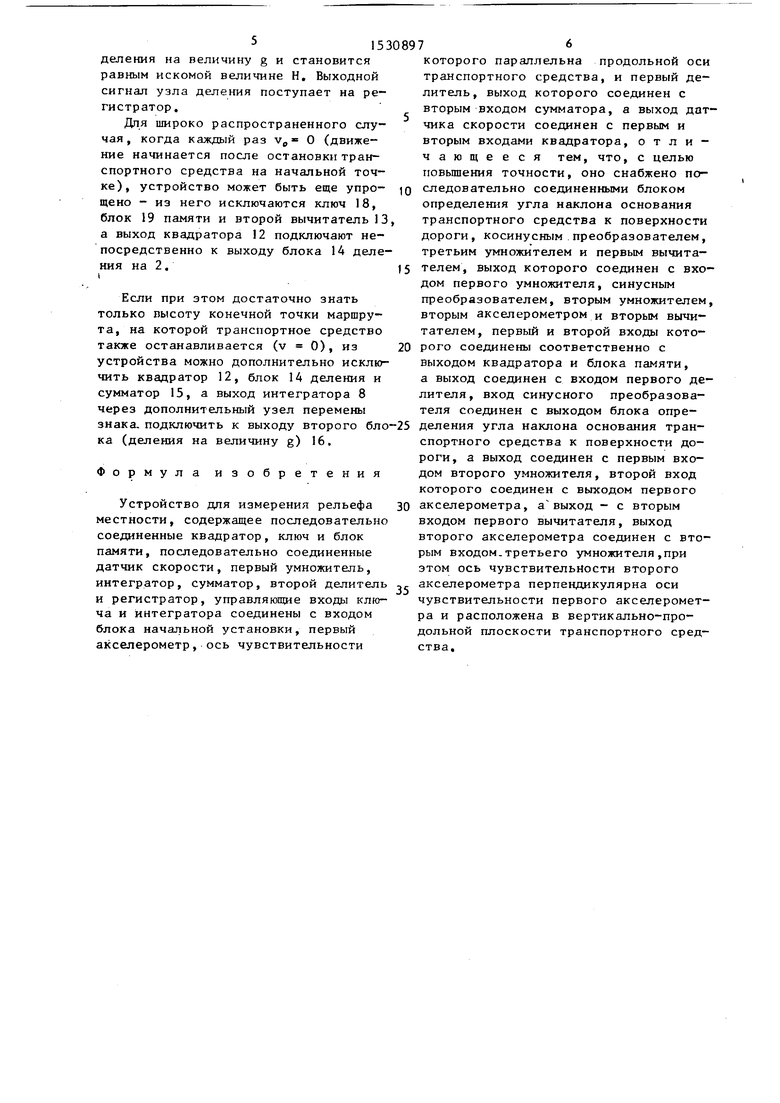
Устройство для измерения рельефа местности (фиг.2) включает в себя блок 1 определения угла наклона основания транспортного средства к поверхности дороги, выход которого через синусный преобразователь 2 и второй умножитель 3 подключен к суммирующему входу первого вычитателя 4, а через косинусный преобразователь 5 и третий умножитель 6 - к вычитающему входу первого вычитателя 4, выход которого через первый умножитель 7 подклю- чен к входу интегратора 8, причем вторые входы второго 3 и третьего 6 умножителей соединены с выходами соответственно первого 9 и второго 10 жестко связанных с основанием аксе- лерометров, оси чувствительности которых направлены соответственно перпендикулярно и параллельно основанию в вертикально-продольной плоскости.
Устройство содержит также датчик 11 скорости, выход которого соединен с вторым входом первого умножителя 7 и через последовательно включенные квадратор 12, второй вычита- тель 13, первый делитель (осуществля- ющий деление на 2) 14 и сумматор 15 подключен к второму делителю (осуществляющему давление.на величину g) 16, второй вход связан с задатчиком 17 сигнала ускорения силы тяжести g.
Выход квадратора 12 через последовательно включенные ключ 18 и блок 19 памяти соединен с вычитающим входом второго вычитателя 13, а управляющие входы интегратора 8 и ключа 18 подключены к блоку 20 начальной ус- тановки. Выход интегратора 8 соединен с вторым входом сумматора 15. Выход второго делителя соединен с регистратором 21.
Устройство реализует следующую
зависимость:
г 2 t
Н ------- + - j (a sinoi
2g
g
Q
5
.
5
5
- c) -v -dt,
где H - определяемое превышение; Vjj,v - начальная и текущая скорости транспортного средства; g - ускорение силы тяжести в
точке измерений;
а,ау - измеренные акселерометрами ускорения;
об - угол наклона основания транспортного средства в вертикально-продольной плоскости к поверхности дороги. Устройство работает следующим образом.
В начальный момент по цепи подается сигнал Начальная установка, который производит обнуление интегратора 8 и замыкание ключа 18. При этом сигнал начального значения скорости V VQ , вырабатываемый датчиком 11 скорости, возводится в квадрат в квадраторе 12 и через ключ 18 подается в блок 19 памяти, где фиксируется в виде v. По окончании действия кратковременного сигна- . ла Сброс ключ 18 размыкается. Измеренное блоком 1 значение угла oL поступает на входы синусного преобразователя 2 и косинусного преобразователя 5, выходные сигналы которых в виде sin оС и cosoL умножаются во втором 3 и третьем 6 умножителях соответственно на показания первого 9 (ati) и второго 10 (а) акселеромет- ров. Полученная на выходе первого вы- читателя 4 разность (ausinoi-а cosut) в первом умножителе 7 перемножается с текущим значением скорости v, поступающим с выхода датчика 11 скорости, сигнал ( o6)v интегрируется по времени в интеграторе 8 и подается на первый вход сумматора 15.
На второй вход сумматора поступаv - v«
ет сигнал , который образуется за счет прохождения выходного сигнала датчика 11 скорости v через квадратор 12, второй вычитатель 13, на вычитаю ций вход которого подключен сигнал Vg блока 19 памяти,блок 14 деления на 2.
Выходной сигнал второго суммато- lit
V - Vflt
pa 15 в виде -г j (a sinoL- a cosoi)v.dt делится в блоке 16
5 15308976
деления на величину g и становитсякоторого параллельна продольной оси
равным искомой величине Н. Выходнойтранспортного средства, и первый десигнап узла деления поступает на ре-литель, выход которого соединен с
гистратор. вторым входом сумматора, а выход датДпя широко распространенного слу-чика скорости соединен с первым и чая, когда каждый раз v О (движе-вторым входами квадратора, о т л и - ние начинается после остановки тран-чающееся тем, что, с целью спортного средства на начальной точ-повышения точности, оно снабжено пока), устройство может быть еще упро- Q следовательно соединенными блоком щено - из него исключаются ключ 18,определения угла наклона основания блок 19 памяти и второй вычитатель 13, транспортного средства к поверхности а выход квадратора 12 подключают не-дороги, косинусным.преобразователем, посредственно к выходу блока 14 деле-третьим умножителем и первым вычитания на 2.15 телем, выход которого соединен с вхо- дом первого умножителя, синусным
Если при этом достаточно знатьпреобразователем, вторым умножителем,
только высоту конечной точки марщру-вторым акселерометром и вторым вычита, на которой транспортное средствотателем, первый и второй входы кототакже останавливается (v 0), из20 рого соединены соответственно с
устройства можно дополнительно исклю-выходом квадратора и блока памяти,
чить квадратор 12, блок 14 деления иа выход соединен с входом первого де-
сумматор 15, а выход интегратора 8лителя, вход синусного преобразова-
через дополнительный узел переменытеля соединен с выходом блока опре- знака, подключить к выходу второго бло-25 деления угла наклона основания транка (деления на величину g) 16.спортного средства к поверхности дороги, а выход соединен с первым вхо-
Формула изобретениядом второго умножителя, второй вход
которого соединен с выходом первого
Устройство дпя измерения рельефа30 акселерометра, а выход - с вторым
местности, содержащее последовательновходом первого вычитателя, выход
соединенные квадратор, ключ и блоквторого акселерометра соединен с втопамяти, последовательно соединенныерым входом,третьего умножителя,при
датчик скорости, первый умножитель,этом ось чувствительности второго
интегратор, сумматор, второй делитель акселерометра перпендикулярна оси
и регистратор, управляющие входы клю-чувствительности первого акселерометча и интегратора соединены с входомра и расположена в вертикально-проблока начальной установки, первыйдольной плоскости транспортного средакселерометр, ось чувствительностиства.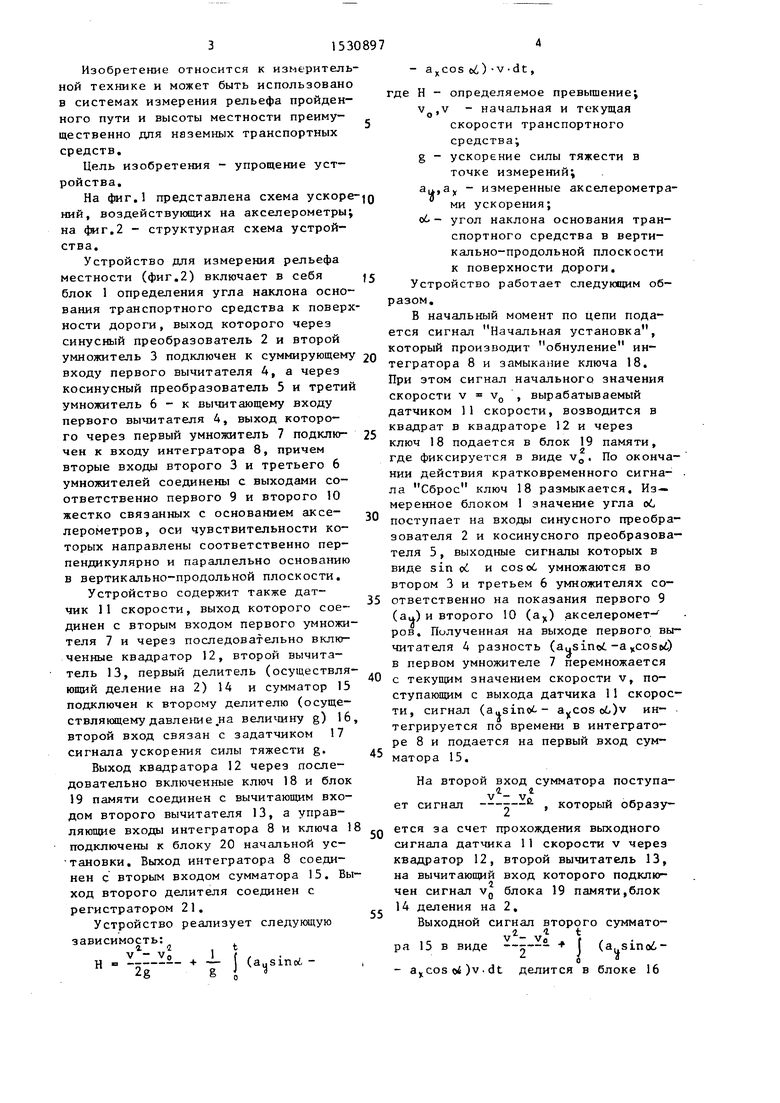
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического нивелирования | 1986 |
|
SU1388726A1 |
| Устройство для выбора частотных диапазонов передачи группового радиосигнала | 1982 |
|
SU1072277A1 |
| Фильтр Калмана | 1987 |
|
SU1385265A1 |
| Устройство для измерения отношения мощностей сигнал/шум в корреляционных приемниках | 1977 |
|
SU621107A1 |
| Цифровой фильтр | 1990 |
|
SU1739483A1 |
| СКАНИРУЮЩЕЕ УСТРОЙСТВО | 1990 |
|
SU1816185A1 |
| Устройство для определения закона распределения случайной величины | 1986 |
|
SU1425713A1 |
| Устройство для прогнозирования длительности производственных операций | 1990 |
|
SU1781685A1 |
| ОБНАРУЖИТЕЛЬ-ИЗМЕРИТЕЛЬ ДОПЛЕРОВСКИХ СИГНАЛОВ | 1991 |
|
RU2017167C1 |
| Устройство для определения положения основания транспортного средства относительно земной поверхности | 1991 |
|
SU1812425A1 |
Изобретение предназначено для измерения рельефа местности. С целью упрощения устройства угол наклона основания транспортного средства из блока 1 преобразуется в значения синуса и косинуса в преобразователях 2 и 5. Полученные значения в множителях 3 и 6 перемножаются с сигналами акселерометров 9 и 10, установленных соответственно перпендикулярно и параллельно основанию в вертикально-продольной плоскости. В вычитателе 4 формируется разность этих произведений, которая в умножителе 7 перемножается со значением текущей скорости, формируемым датчиком 11. Сигнал с умножителя 7 интегрируется по времени в интеграторе 8 и подается на первый вход сумматора 15. На второй вход последнего поступает сигнал, формируемый в блоках 12, 18, 19, 13 и 14 и являющийся полуразностью квадратов текущей и начальной скоростей. После деления сигнала с сумматора 15 на ускорение силы тяжести в блоке 16 результат в виде искомого превышения поступает на регистратор 21. 2 ил.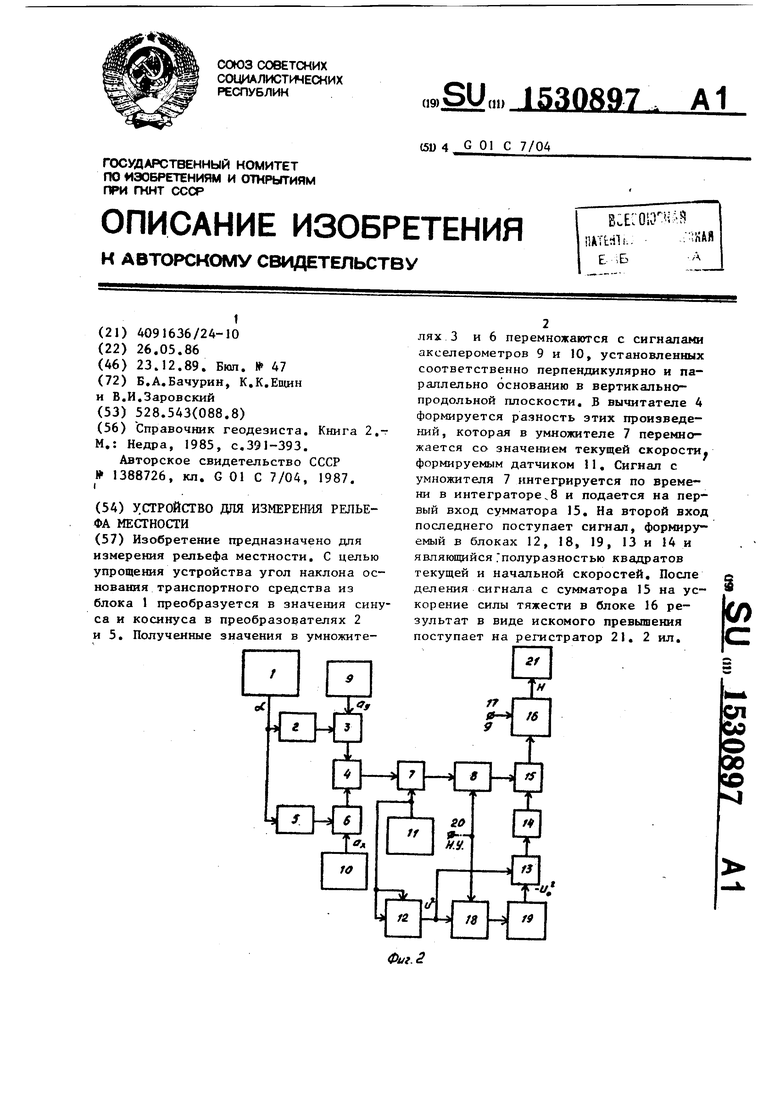
| Справочник геодезиста | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для автоматического нивелирования | 1986 |
|
SU1388726A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
