СО
с

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования удара твердых тел | 1988 |
|
SU1567889A2 |
| Устройство для измерения угла наклона основания транспортного средства к земной поверхности | 1987 |
|
SU1508095A1 |
| Устройство для формирования изображения при коническом сканировании | 1989 |
|
SU1734233A1 |
| Устройство для измерения рельефа местности | 1986 |
|
SU1530897A1 |
| ФУНКЦИОНАЛЬНЫЙ ГЕНЕРАТОР | 2013 |
|
RU2541147C1 |
| ФАЗОЧУВСТВИТЕЛЬНЫЙ ПРИЕМНИК ДЛЯ РЕЛЬСОВОЙ ЦЕПИ | 1991 |
|
RU2041099C1 |
| Устройство определения и индикации углов крена самолета | 1991 |
|
SU1827361A1 |
| Измеритель местоположения бурового судна | 1983 |
|
SU1134928A1 |
| ФАЗОВЫЙ ПЕЛЕНГАТОР | 2001 |
|
RU2206901C1 |
| Устройство для имитации движения судна вблизи берега | 1982 |
|
SU1084830A1 |
Область использования: измерительная техника. Сущность изобретения: устройство содержит две пары датчиков неоднородности земной поверхности (1. 2), каждый из которых состоит из первого (3) и второго (4) Датчиков, три блока определения запаздывания (5, 6. 7), вычислитель угла наклона (8). вычислитель.скорости (9), два перемножителя (10, 19), вычитатель (11). два квадратора
Изобретение относится к области измерительной техники и может быть использовано, например, в геодезии, высокоточных навигационных системах, в том числе в системах для автоматического определения высоты..
Целью изобретения является повышение информативности за счет одновременного определения высоты плоскости основания транспортного средства над земной поверхностью и измерение скорости движения.
Для уяснения принципа работы предлагаемого устройства рассмотрим чертеж. Из параллельности осей чувствительности датчиков неоднородности земной поверхности, принадлежащих к одной паре датчиков 1 и 2, следуетподобие треугольников AAiOiBi и Л А2ОаВ2. При этом выполняется соотношение
Da C2 Ai Bt Di Ci
DZ N2 4- N2 DiCi
или
00
5
iJ ю ел
Bj v h2
#1 v hr
hi +D sin a
tii
(D
где D - известное расстояние между точками пересечения осей чувствительности:
hi,2 - искомая высота точки отсчета Oi,2 над земной поверхностью;h2 hi + D.sin a (5)
а угол наклона основания к земной
поверхности;. &i - 0 V- скорость движения транспортного 5 - Т2 sin 2 у средства;
01,2- транспортное запаздывание меж- sin «(cos a -Mgyslrm) ду одноименными (первыми, соответствен- cos2v- I г а . но, вторыми) датчиками, принадлежащими
к различным парам датчиков ( в i -1 2 - t i ; Ю ф - лы (6) можно получить уравне„ие ; eSj. 1, здесь t i и моменты прохож- для sin a дения неоднородности земной поверхности
соответствен но черезось чувствительности2 а первого и второго датчиков 1-ой пары, I т cos у - т sin a -
1,2);15 , j
В то же время имеет место следующее вы-- tg у а sin ay 1 - S|n2 a . (7)
ражение:
где
AiBt 0iv AiCt+.CiBi 20 f- ft-ft -m;
(y-a) +tg(y + «) т2 sin 2 у w
sin 2 у /2 Возведя обе части уравнения (8) в квад- cos2 у- sin2 а - 25 РЭТ находим
При выводе (2) использовались идеест- 1 + (f+tgy)2 sin a - ны е формулы .
- 2fcos2y(f-ftgy)
tgx+tgy iJLL:30 ... . . : cosxcosy ,Sin2a + f2cos4y 0. (9),
COS (У - CC, COS f V Ь tt :
v/ VAу Исходя из физических соображений, угояа
2 2является действительной величиной, отве cos у -sin а.35 чающей условию
В свою очередь, скорость транспортно- а акр, (10) го средства может определяться традиционным корреляционно-экстремальным путем где « кр - предельно возможный угол на- (1) по формуле (см.чертеж): 40 клона основания, который для. реальных п, п транспортных средств составляет несколь- v - ---У--- ---Р..СО5.У---в ко десятков градусов.
Г2С08(у-«) Т2соз(у-«.).Кроме того, знак угла а определяется
. соотношениями между величинами транс- (3) портного запаздывания (см.чёртеж): .
TI (cos a + tg у sin a)
.: - : .: . :.. V . . . :. . fa в2 :-- . . . гДе D - известное базовое направление
второй пары датчиков, равное расстоянию(9i fh - ft 0 (11)
между осями чувствительности датчиков; 50 :,
Т2 - интервал времени между момента-Условия (10)-(11) определяют единст- ми прохождения неоднородности земной венное решение уравнения (9), которое вы-. Поверхности через оси чувствительности бирается из множества решений датчиков второй пары: Г2 t 2-t 2.
; Решая совместно уравнения (1)-(3), на- 55 а arcsin( ± V)(12) ; ходим ....,. -. .-..-. .- . ....... - . л -...- . .-.
Здесь использованное обозначение являет: .. 0iv ( cos2 у - sin2 а ) ( решением квадратного уравнения 1 ; sin2y V
Y2 + PY + q 0.
в котором
p 2fcos2y(f +tgy) +1 ,(14) 5 (f+tgy)2 + 1
cos у
(f+tgy)2 + 1
В (13) величина Y определяется выражением
-y
-q
.(15)
Анализ уравнений (3)-(5), (8), (12), (14) и (15) показывает, что, значения величины D ,у
и непрерывно измеряя, например, корреля- ционно-экстремальным путем в 1, #2. 2 при физических условиях (10)-(11), можно однозначно определять угол наклона а, скорость v, a также высоты hi, h2. Алгоритмы (3}-(5), (8), (10)-{12), (14), (15) являются основой принципа работы предлагаемого устройства.
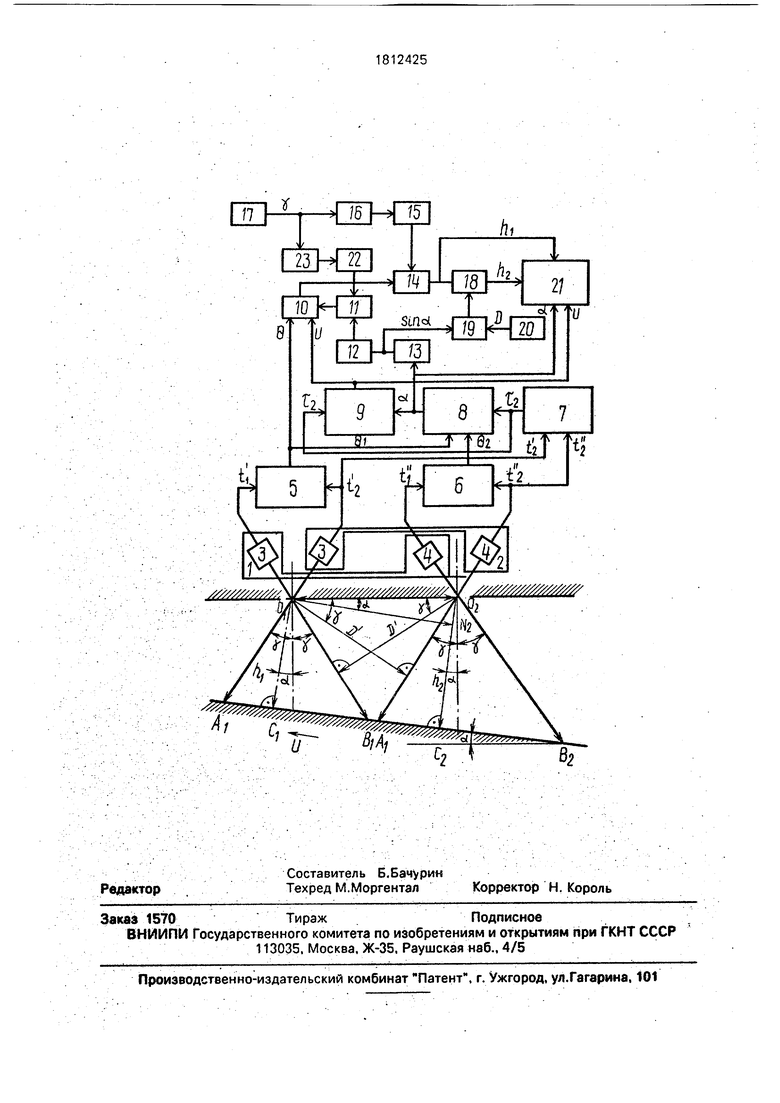
На чертеже представлена структурная схема заявляемого устройства.
Устройство содержит первый 1 и второй 2 пары датчиков неоднородности земной поверхности; каждая ,из которых включает первый 3 и второй 4 датчик неоднородности земной поверхности. Оси чувствительности всех датчиков расположены в вертикально- продольной плоскости. При этом оси датчиков каждой пары параллельны и расположены на известном базовом направлении D , а оси одноименных датчиков (двух первых 3 и двух вторых 4) пересекают- ся в точках Oi и Оа на уровне отсчета высоты транспортного средства. Расстояние между точками пересечения ОЮ2 равно известной величине D. Базовые направления первой 1 и второй 2 пары датчиков составляют с ос- нованием углы, равные у, что обусловливает величину угла между осями чувствительности одноименных датчиков 2 у. Первые датчики 3 подключены к двум входам первого блока определения запаздыва- ния 5, а вторые датчики 4 - к двум входам второго блока определения запаздывания 6. Кроме того, вторая пара датчиков 2 соединена с двумя входами третьего блока определения запаздывания 7, выход которого через вычислитель угла наклона 8, вычислитель скорости 9, первый перемножитель 10, третий вход которого через вычитатель 11 и первый квадратор 12 связан с выходом пер
5
10
15
20 25
30 35 40 45 5055вого блока определения синуса 13, делитель 14, второй вход делителя которого через второй блок определения синуса 15 и умножитель на два 16 соединен с выходом задат- чика величины угла 17, и сумматор 18, второй вход которого через второй перемножитель 19 связан с выходом задатчика величины расстояния 20, подключен к входу регистратора 21, причем вход уменьшаемого вычитателя 11 через второй квадратор 22 и блок определения косинуса 23 связан с выходом задатчика величины угла 17.
Блоки определения запаздывания 5, 6 и 7 представляют собой корреляционно-экстремальные блоки, содержащие корреляторы и регулируемые линии задержки (см., например, БЕЛОГЛАЗОВ И.Н., ТАРАСЕН- КО В.П. Корреляционно-экстремальные системы. М.: Советское радио, 1974, с.12, рис. 1.5). Они могут быть реализованы в цифровом виде (см., например, патент США N° 4509131, кл. G 01 Р 3/42, 364/565, 1988.)
Согласно материалам прототипа, а также авт.св.Мг 1362929 по кл. G 01 С 7/04, вычислители 8 и 9 могут быть реализованы на основе микропроцессоров, выполняющих операции по формулам (12), (14), (15) и (3).
В качестве регистратора 21 может применяться дисплей, магнитограф, ЦПУ и т.п.
Заявляемое устройство работает следующим образом. При движении транспортного средства при прохождении одних и тех же неоднородностей земной поверхности первым 3 и вторым 4 датчиками второй пары датчиков 2 в третьем блоке определения запаздывания 7 корреляционно-экстремальным путем формируется величина т.. Одновременно по сигналам первых 3 и вторых 4 датчиков в первом 5 и втором 6 блоках определения запаздывания находятся величины 01 и $2. В вычислителе угла наклона 8, используя сигналы Г2, #1 и 9 2 и зная величину у, по формулам (8), (10)-(15) находят текущее значение угла наклона а. Величина ее поступает в регистратор 21 для фиксации и отображения, а также вычислитель скорости 9, где. зная т 2, « , D и у , с помощью формулы (3) определяют текущее значение скорости v транспортного средства. Полученный сигнал v фиксируется регистратором 21. Сигнал угла наклона ас помощью первого блока определения синуса 13 и первого квадратора 12 также вычитается в вычитателе 11 из сигнала cos2 у, который образуется путем последовательного преобразования постоянного сигнала задатчика величины угла 17 у в блоке определения косинуса 23 и втором квадраторе
Технико-экономическое преимущество заявляемого устройства заключается в расширении функциональных возможностей за счет дополнительного определения высоты основания транспортного средства надземной поверхностью и изменения скорости движения.
Формулаизобретения Устройство для определения положения основания транспортного средства от- ноеительно земной поверхности, содержащее первую и вторую пары датчиков неоднородности земной поверхности, первый блок определения запаздывания, каждый из двух входов которого подключен к выходу первого датчика неоднородности соответствующей пары, второй блок опре- запаздывания, каждый из двух входов которого подключен к выходу второго датчика соответствующей пары, третий блок определения запаздывания, первый и второй входы которого подключены соответственно к выходам датчиков неоднородности второй пары, и вычислитель угла наклона, каждый из трех входов которого подключён к соответствующему блоку определения запаздывания, а выход соединен с первым входом регистратора, при чем оси чувствительности датчиков неоднородности расположены попарно параллельно друг другу в продольной плоскости, перпендикулярной плоскости основания транспортного средства, под углом у к нормали, к плоскости и с пересечением осей чувствительности соответствующих датчиков нео- днородности другой пары в двух точках,
расположенных на расстоянии D друг от друга, отличаю щееся тем. что, с целью повышения информативности за счет одновременного определения высоты плоскости основания транспортного средства над земной поверхностью и скорости движения, оно снабжено двумя блоками определения синуса, двумя квадраторами, двумя перемножителями, умножителем на два, блоком определения косинуса, сумматором, делителем, вычитателем, задатчиком величины угла ( у), задатчиком величины расстояния D и вычислителем скорости, первый и второй входы которого подключены соответственно к выходам третьего блока определения запаздывания и вычислителя угла наклона, а выход соединен с вторым входом регистратора и с первым входом перемножителя, второй вход которого соединен с выходом первого
блока определения запаздывания, третий вход соединен с выходом вычитателя, а выход подсоединен к соответствующему входу делителя, другой вход которого подключен к выходу первого блока определения синуса, а выход соединен с третьим входом регистратора и через сумматор - с четвертым входом регистратора, другой вход сумматора соединен с выходом второго умножителя, два входа которого соединены соответственно с выходами задатчика величины расстояния D и второго блока определения синуса, подключенного входом к выходу вычислителя угла наклона и соединенного через первый квадратор с соответствующим
входом вычитателя, другой вход которого подключен через последовательно соединенные блок определения косинуса и второй квадратор к выходу задатчика величины угла у, подключенного также через умножитель на два ко входу первого блока определения синуса, при этом точки пересечения осей чувствительности соответствующих датчиков неоднородности совмещены с плоскостью основания
транспортного средства.
| Устройство для измерения угла наклона основания транспортного средства к земной поверхности | 1986 |
|
SU1362929A1 |
| Устройство для измерения угла наклона основания транспортного средства к земной поверхности | 1987 |
|
SU1508095A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
