Известны электромеханические интеграторы с точностью интегрир;вания до 0,1% и выше. Они основаны на принципе интегрирования угловой скорости. Для обеспечения подобной точности используются замкнутые следящие системы, имеющие тахогенераторы. Однако использование интегрирующих двигателей (В качестве электромеханических интеграторов не получило широкого распространения из-за их невысокой точности, которая определяется нелинейностью регулировочной характе-: ристики.
Предлагаемое корректирующее устройство для компенсадии ногрещности интегрирующего двигателя постоянного тока отличается тем, что оно выполнено на калиброванном сопротивлении, включенном но-: следовательно в цепь якоря, и. усилителе, к входу которого подключен; часть цепи якоря с калиброванным сопротивлением, а его выход включен последовательно в цепь якоря двигателя. Такое выполнение позво-; ляет улучшить линейность регулировочной характеристикиКроме этого, с целью увеличения входного сопротивления, устройство вылолнено с использованием усилителя постоянного тока и мостовой схемы, в одно из плеч которой включен интегрирующий двигатель; одну из диагоналей составляет выход усилителя, другую - цепь обратной связи, Включенная последовательно с входом усилителя.
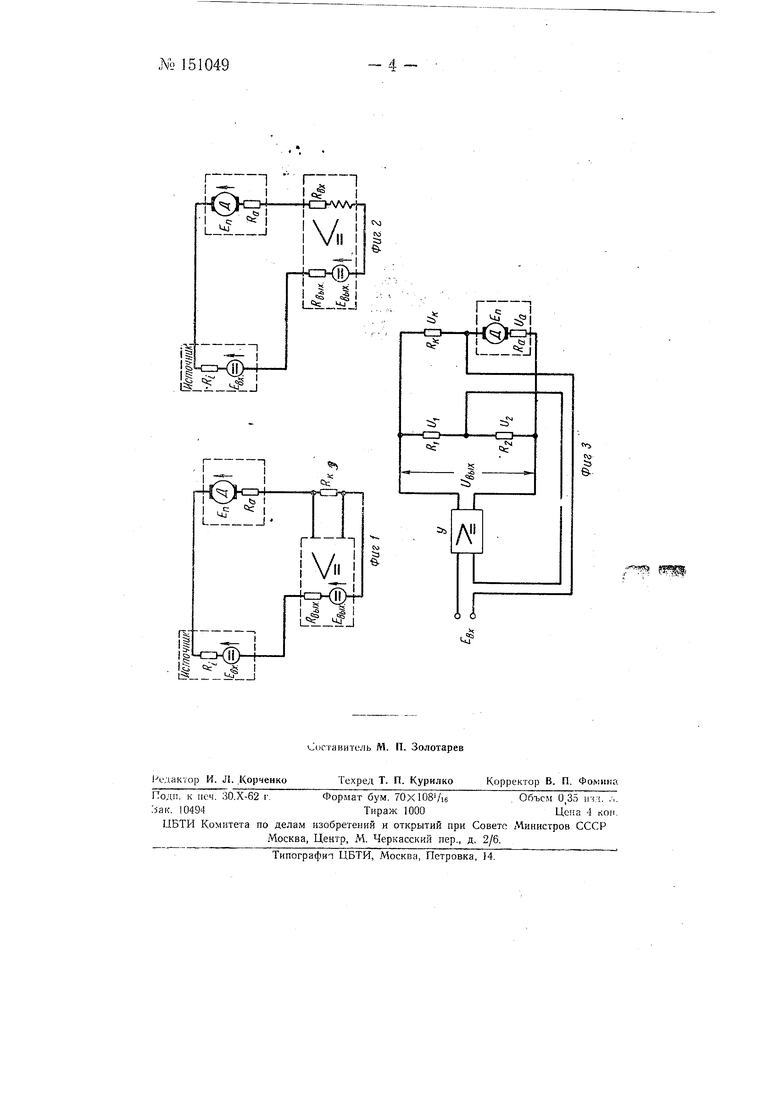
На фиг. 1 показана схема Предлагаемого устройства с компенсационным сопротивлением; на фиг. 2 - то же, с магнигны-м усилителем; на фиг. 3 - принципиальная схема устройства с интегратором, включающим масщтабньш усилитель.
В устройстве в качестве исполнительного органа используется обычный интегрирующий двигатель, который питается напряжением, автомаJ 151049 2 -тичесгеи откорректированным таким образом, что его погрешность оказывается скомпенсированной независимо от скорости вращения и момента нагрузки.
Интегрирующий двигатель представляет собой электродвигатель постоянного тока с постоянным магнитом. Момент трения и момент инерции двигателя доведены до весьма малых величин. В таком двигателе скорость вращения с высокой точностью должна быть нропорцио1гальнз питающему напряжению, и угловой путь ротора, равный интегралу от скорости вращения, пронорциокален интегралу от напряжения зо времени. Погрешность интегрирования устраняется нутем компексации (гадеш-гя напряжения на сопротивлении цени интегрирующего двигателя, что приводит к стабильной скорости вращения носледнего.
В схему устройства входят двигатель Д (фиг. 1), компенсационное сонротивление RK , усилитель с выходной электродвижущей силой еыл: источник напряжения с Яв, питающий двигатель Д. Э.д.с. Еg., уравновешивается суммой противо-э.д.с. ЕП, полученной в результате падения напряжения на сопротивлении Ra неподвижного двигателя (сонрогивление Ra равно сумме сопротивлений обмоток, щеточно-коллекторного узла и .проводников) н падения напрял ения на внутреннем сонротивлении Ri источника. Выходная э.д.с. усилителя связана с входным напряжением IRa через коэффициент /С усиления по напряжению, при g
этом /С -75 . где / - ток, протекающий но комненсационному соiKit
нротивлению.
Требуемый коэффициент Кй усиления равен
о j о -j .С) I ,
-г/ /
гл.е R,,jc - выходное сопротивление усилителя (значения Ra, Ri, RK приведены ранее).
Для полной компенсации погрещности скорости вращения, а следовательно, для точного интегрирования в статическом режиме необходимо чтобы коэффициент /С усиления но напряжению соответствовал требуемому коэффициенту Ко усиления. Когда коэффициент К усиления меньше коэффициента /Со, имеет место недокомпенсадия двигателя, а при будет его нерекомпенсация.
В уст;.ойстве может быть применен магнитный усилитель (фиг- 2). вгепосредстьенно измеряющий ток, потребляемый интегрирующим двигателем. В усилителе выходная э.д.с. Е,, пропорциональна входному
току/ел. а коэффициент усиления Ку . Характеристика устройства с магнитным усилителем не отличается от характеристики устройства с компенсационным сопротивлением.
Корректирующее устройство также может быть выполнено в виде KrfTerparopa (фиг- 3), представляющего собой комбинацию масштабного усилителя, -питающего интегрирующий двигатель, со схемой компенсации погрешности двигателя. Масштабный усилитель образуется усилителем У с больщим коэффициентом усиления и цепью обратной Связи, выполненной :в виде делителя напряжения, с помощью которой осуществляется глубокая обратная связь. Схема компенсации состоит из компенсационного сопротивления Rx,, включенного последовательно с двигателем. Падение напряжения UK на нем, пропорциональное току, а следовательно, погрещности двигателя, складывается со входной э.д.с. ESX для компенсации погрешности двигателяRU
Полученное суммарное напряжение псступает на вход масштабногч) усилителя. Усиленное напряжение подается на двигатель Д. Цепью обратной связи является делитель напряжения на сопротивлениях . Напряжение обратной связи равно разности выходного напряжения делителя, и падения напряжения на компенсационном сопротивлении RK. По-следний вариант устройства проверен практически и показал положительные результаты.
Предмет изобретения
1.Корректирующее устройство для компенсации погрешности ии егрируюш,его двигателя постоянного тока, отличающееся тем, что, с целью улучщения линейности его регулировочной характеристики, оно выполнено на калиброванном сопротивлении, включенном последовательно в цепь якоря, и усилителе, к входу которого подключена часть цепи с калиброванным сопротивлением, а выход включен последовательно в цепь якоря.
2.Устройство по н. 1, отличающееся тем, что, с целью увеличения входного сопротивления, оно выполнено с использованием усилителя постоянного тока и мостовой схемы, в одно из плеч которой включен интегрирующий двигатель; одну из диагоналей составляет выход усилителя, другую - цепь обратной связи, включенная последо-вательно с входом усилителя.
- 3 -№ 151049

| название | год | авторы | номер документа |
|---|---|---|---|
| Интегратор | 1979 |
|
SU834715A1 |
| Электронный автоматический самопишущий полярограф | 1954 |
|
SU111830A1 |
| ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕННОГО ТОКА | 1994 |
|
RU2084905C1 |
| УСТРОЙСТВО для РЕГУЛИРОВАНИЯ НАТЯЖЕНИЯ ЛЕНТЫ | 1973 |
|
SU362698A1 |
| Стенд для исследования переходных процессов в системах автоматического регулирования | 1947 |
|
SU87332A1 |
| Интегрирующее устройство | 1979 |
|
SU824227A1 |
| ИНТЕГРАТОР ДЛЯ ХРОМАТОГРАФА | 1967 |
|
SU204619A1 |
| Устройство для математических вычислений | 1937 |
|
SU56843A1 |
| УСТРОЙСТВО КОМБИНИРОВАННОГО ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ЭКСКАВАТОРА | 1990 |
|
RU2030521C1 |
| КУЛОНОМЕТРИЧЕСКАЯ УСТАНОВКА С КОНТРОЛИРУЕМЫМ ПОТЕНЦИАЛОМ | 1998 |
|
RU2135987C1 |