1
Устройство предназначено для задания и автоматического поддержания постоянства величины натяжения ленты в станках для намотки труб из стеклопластика.
Известно устройство для регулирования натяжения ленты, например в намоточных станках, содержащее тормозной механизм с двигателем постоянного тока, статические преобразователи, датчик и электродатчик натяжения.
Предлагаемое устройство отличается от известного тем, что к цепи электродвигателя подключен статический бесконтактный регулируемый преобразователь, охваченный отрицательной обратной связью по току и поддерживающий постоянство тока в якорной цепи независимо от скорости, и интегрирующий усилитель. При этом сигнал рассогласования электрически связан с задатчиком величины натяжения и датчиком напряжения и управляющий статическим бесконтактным регулируемым преобразователем, изменяющим ток возбуждения двигателя.
Для расширения диапазона регулирования усилия натяжения обмотка возбуждения электродвигателя включена по схеме питания от двух включенных встречно источников - регулируемого и постоянного.
С целью компенсации уменьшения коэффициента усиления системы применена отрицательная обратная связь по напряжению двигателя, сигнал которой поступает в статический преобразователь силового каскада через диод и сопротивление. На фиг. 1 показана блок-схема устройства;
на фиг. 2 - то же, электрическая схема; на фиг. 3 - электрическая схема узла датчика натяжения; на фиг. 4 - схема узла преобразователя и на фиг. 5 - кинематическая схема устройства.
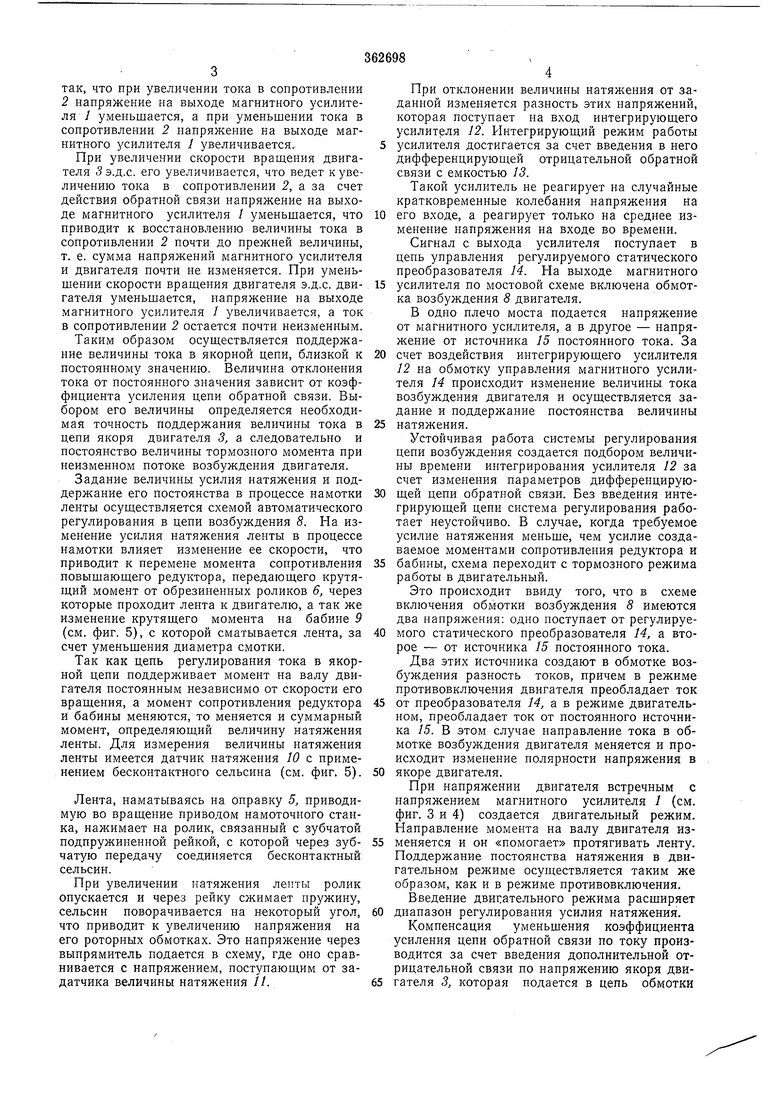
К магнитному усилителю 1 через сопротивление 2 подключен электродвигатель 5 постоянного тока. Падение напряжения на сопротивлении 2 подается в обмотку управления промежуточного усилителя 4, на выходе которого включена обмотка управления магнитного усилителя /.
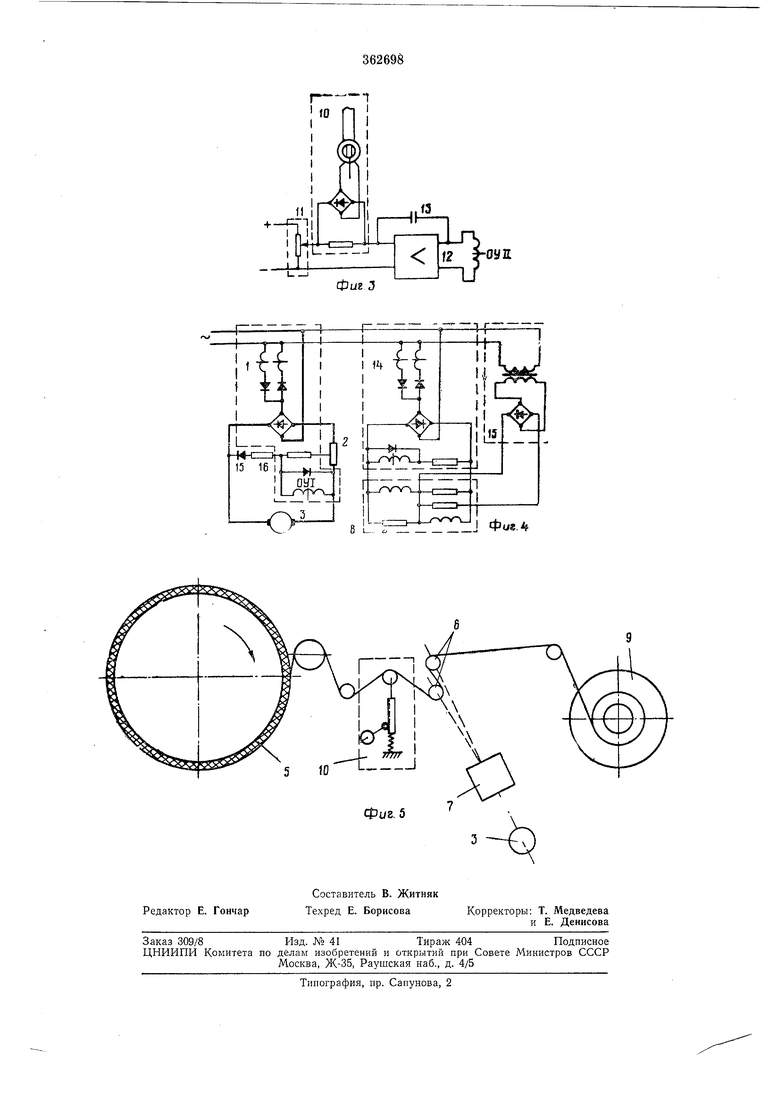
При наматывании ленты на оправку 5 (см. фиг. 5) за счет натяжения ленты, охватывающей отпускные обрезиненные ролики 6 происходит вращение двигателя 3 через повышающий редуктор 7. Работа двигателя происходит в режиме противовключения в силовой цепи магнитного усилителя (см. фиг. 3). Совершается суммирование двух напряжеНИИ: напряжения преобразователя / и э.д.с. электродвигателя 5 (см. фиг. 3).
Сумма этих напряжений определяет величину тока в сопротивлении 2. Обратная связь стремится поддержать этот ток неизменным,
так как магнитные усилители 1 и 4 включены
так, что при увеличении тока в сопротивлении 2 напряжение на выходе магнитного усилителя У уменьшается, а при уменьшении тока в сопротивлении 2 напряжение на выходе магнитного усилителя / увеличивается.
При увеличении скорости вращения двигателя 5 э.д.с. его увеличивается, что ведет к увеличению тока в сопротивлении 2, а за счет действия обратной связи напряжение на выходе магнитного усилителя / уменьшается, что приводит к восстановлению величины тока в сопротивлении 2 почти до прежней величины, т. е. сумма напряжений магнитного усилителя и двигателя почти не изменяется. При уменьшении скорости вращения двигателя э.д.с. двигателя уменьшается, напряжение на выходе магнитного усилителя I увеличивается, а ток в сопротивлении 2 остается почти неизменным.
Таким образом осуществляется поддержание величины тока в якорной цепи, близкой к постоянному значению. Величина отклонения тока от постоянного значения зависит от коэффициента усиления цепи обратной связи. Выбором его величины определяется необходимая точность поддержания величины тока в цепи якоря двигателя 3, а следовательно и постоянство величины тормозного момента при неизменном потоке возбуждения двигателя.
Задание величины усилия натяжения и поддержание его постоянства в процессе намотки ленты осуществляется схемой автоматического регулирования в цепи возбуждения 8. На изменение усилия натяжения ленты в процессе намотки влияет изменение ее скорости, что приводит к перемене момента сопротивления повышающего редуктора, передающего крутящий момент от обрезиненных роликов 6, через которые проходит лента к двигателю, а так же изменение крутящего момента на бабине 9 (см. фиг. 5), с которой сматывается лента, за счет уменьшения диаметра смотки.
Так как цепь регулирования тока в якорной цепи поддерживает момент на валу двигателя постоянным независимо от скорости его вращения, а момент сопротивления редуктора и бабины меняются, то меняется и суммарный момент, определяющий величину натяжения ленты. Для измерения величины натяжения ленты имеется датчик натяжения Ю с применением бесконтактного сельсина (см. фиг. 5).
Лента, наматываясь на оправку 5, приводимую во вращение приводом намоточного станка, нажимает на ролик, связанный с зубчатой подпружипенной рейкой, с которой через зубчатую передачу соединяется бесконтактный сельсин.
При увеличении натяжения лепты ролик опускается и через рейку сжимает пружину, сельсин поворачивается на некоторый угол, что приводит к увеличению напряжения на его роторных обмотках. Это напряжение через выпрямитель подается в схему, где оно сравнивается с напряжением, поступающим от задатчика величины натяжения 11.
При отклонении величины натяжения от заданной изменяется разность этих напряжений, которая поступает на вход интегрирующего усилителя 12. Интегрирующий режим работы усилителя достигается за счет введения в него дифференцирующей отрицательной обратной связи с емкостью 13.
Такой усилитель не реагирует на случайные кратковременные колебания напряжения на
его входе, а реагирует только на среднее изменение напряжения на входе во времени.
Сигнал с выхода усилителя поступает в цепь управления регулируемого статического преобразователя 14. На выходе магнитного
усилителя по мостовой схеме включена обмотка возбуждения 8 двигателя.
В одно плечо моста подается напряжение от магнитного усилителя, а в другое - напряжение от источника 15 постоянного тока. За
счет воздействия интегрирующего усилителя 12 на обмотку управления магнитного усилителя 14 происходит изменение величины тока возбуждения двигателя и осуществляется задание и поддержание постоянства величины
натяжения.
Устойчивая работа системы регулирования цепи возбуждения создается подбором величины времени интегрирования усилителя 12 за счет изменения параметров дифференцирующей цепи обратной связи. Без введения интегрирующей цепи система регулирования работает неустойчиво. В случае, когда требуемое усилие натяжения меньще, чем усилие создаваемое моментами сопротивления редуктора и
бабины, схема переходит с тормозного режима работы в двигательный.
Это происходит ввиду того, что в схеме включения обмотки возбуждения 8 имеются два напряжения: одно поступает от регулируемого статического преобразователя 14, а второе - от источника 15 постоянного тока.
Два этих источника создают в обмотке возбуждения разность токов, причем в режиме противовключения двигателя преобладает ток
от преобразователя 14, а в режиме двигательном, преобладает ток от постоянного источника 15. В этом случае направление тока в обмотке возбуждения двигателя меняется и происходит изменение полярности напряжения в
якоре двигателя.
При напряжении двигателя встречным с напряжением магнитного усилителя / (см. фиг. 3 и 4) создается двигательный режим. Направление момента на валу двигателя изменяется и он «помогает протягивать ленту. Поддержание постоянства натяжения в двигательном режиме осуществляется таким же образом, как и в режиме противовключения. Введение двигательного режима расширяет
диапазон регулирования усилия натяжения.
Компенсация уменьшения коэффициента усиления цепи обратной связи по току производится за счет введения дополнительной отрицательной связи по напряжению якоря двигателя 3, которая подается в цепь обмотки
управления магнитного усилителя 1 через сопротивление 16, диод. При увеличении скорости вращения двигателя на его якоре растет напряжение. Это напряжение, поступая в цепь обмотки управления магнитного усилителя /, оказывает действие аналогично цепи отрицательной обратной связи, усиливая ее. Диод не позволяет проходить напряжению с выхода преобразователя в цепь обмотки управления.
Предмет изобретения
1. Устройство для регулирования натяжения ленты, например, в намоточных стенках, содержащее тормозной механизм с электродвигателем постоянного тока, статические преобразователи и датчик натяжения, отличающееся тем, что, с целью повышения надежности и облегчения обслуживания устройства, к цепи электродвигателя подключен статический бесконтактный регулируемый преобразователь, охваченный отрицательной обратной связью по току и поддерживающий постоянство тока Б якорной цепи независимо от скорости, и интегрирующий усилитель, электрически связанный с датчиком натяжения и управляющий статическим бесконтактным регулируемым преобразователем, изменяющим ток возбуждения двигателя.
2. Устройство по п. 1, отличающееся тем, что, с целью расщирения диапазона регулирования усилия натяжения, обмотка возбуждения электродвигателя включена по схеме питания от двух включенных встречно источников-регулируемого и постоянного.
3. Устройство по пп. 1 и 2, отличающееся тем, что, с целью компенсации уменьщения коэффициента усиления системы, применена отрицательная обратная связь по напряжению
двигателя, сигнал которой поступает в статический преобразователь силового каскада через диод и сопротивление.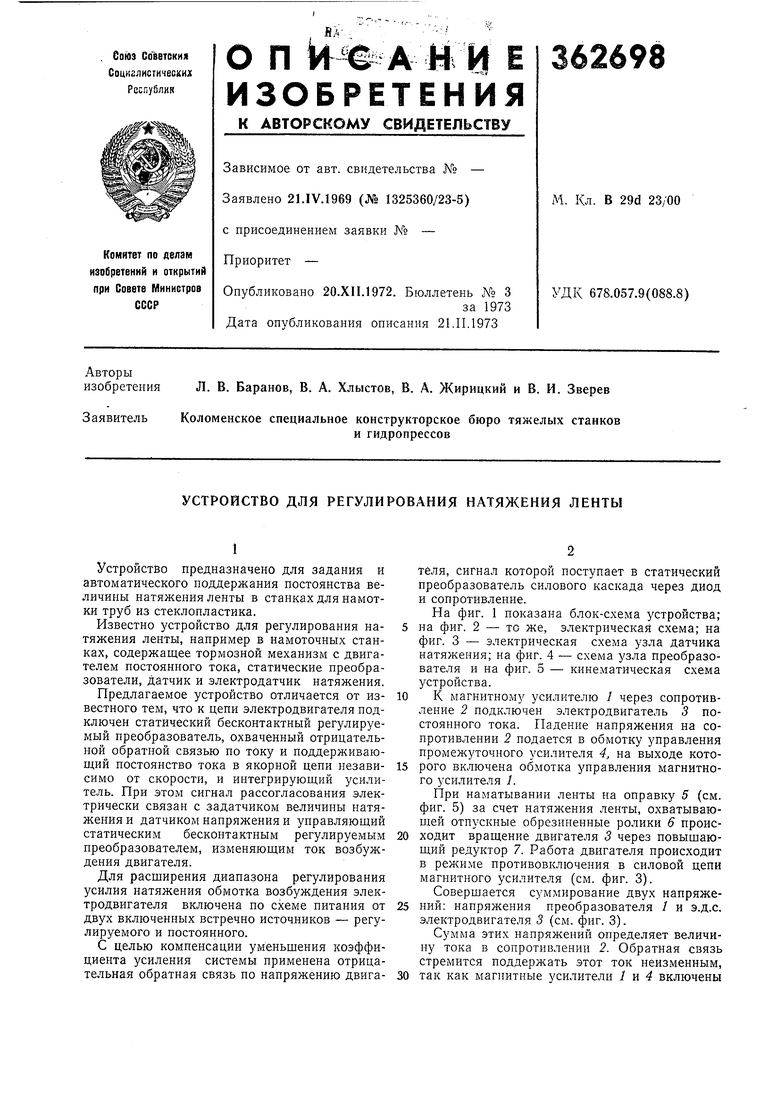

| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ВОЗДУШНОГО ОХЛАЖДЕНИЯ БЛОКОВ ПУСКОТОРМОЗНЫХ РЕЗИСТОРОВ | 2010 |
|
RU2465152C2 |
| Многодвигательный электропривод постоянного тока | 1969 |
|
SU560311A1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ТОРМОЗНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ЭЛЕКТРОПРИВОДА АГЛОЛЕНТЫ | 2002 |
|
RU2232121C1 |
| Устройство для перемотки ленточного материала | 1985 |
|
SU1329862A1 |
| Устройство для стабилизации скорости электродвигателя постоянного тока | 1979 |
|
SU921011A1 |
| Реверсивный электропривод | 1991 |
|
SU1791951A1 |
| СПОСОБ УПРАВЛЕНИЯ ПОТОКОМ ВОЗБУЖДЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 1999 |
|
RU2154892C1 |
| Регулируемый электроприводпОСТОяННОгО TOKA | 1978 |
|
SU803094A1 |
| Квазиоптимальная система автоматического регулирования натяжения полосы на прокатном стане | 1976 |
|
SU578134A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1981 |
|
SU958217A1 |
i-TE rrr-jlriJ
Фиг. 2
