Qiut. 2
315
Изобретение относится к машино строению/ а именно к маннпуляторам, предназначенным для механизации и автоматизации погруэочно-разгрузочных работ.
Целью изобретения является рас- шнренне технологических возможностей за счет увеличения степеней подвижности.
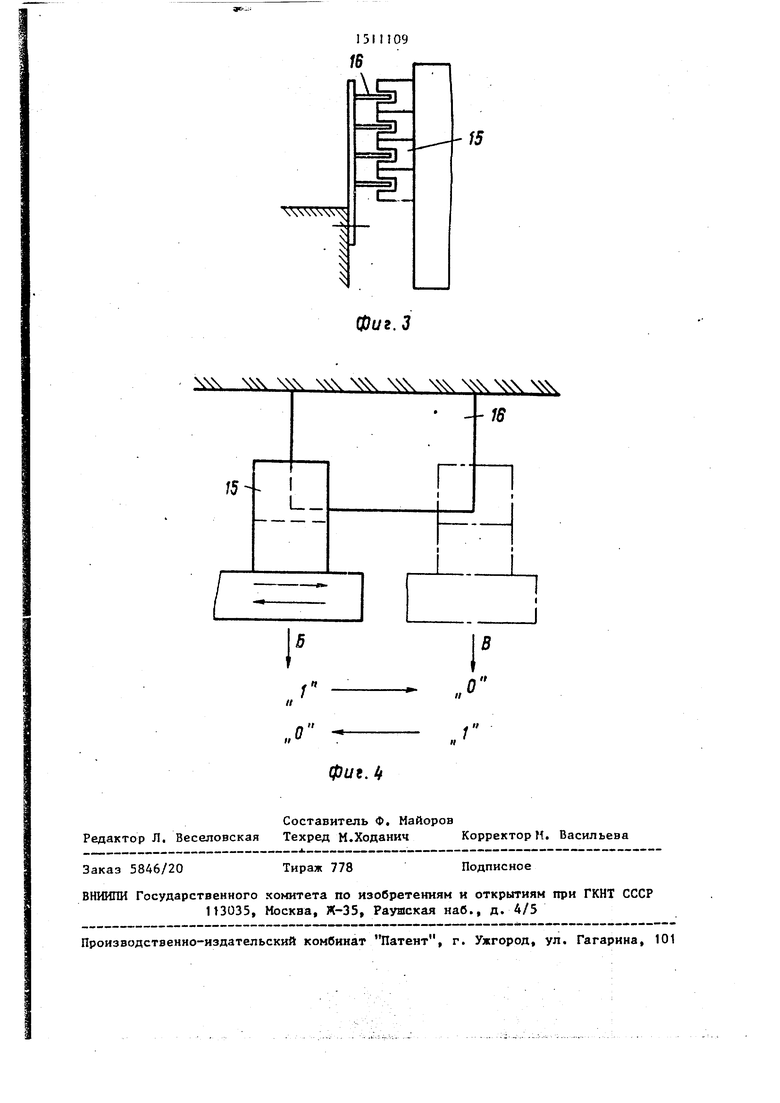
На фиг, 1 изображен манипулятор, общий вид; на фиг, 2 - вид по стрелке А на фиг, 1; на фнг, 3 - элемент автоматики и панель с набором кодовых пластинок, вариант установки; на . А - схема взаимодействия элемента автоматики с кодовой пластн ной, вариант исполнения.
Манипулятор содержит портал 1 с направляющей 2 и зубчатой рейкой 3, на которой расположена каретка А, На каретке 4 установлены два распо ложенных взаимно перпендикулярно направляющих злемента 5 и 6, одни концы которых жестко связаны между собой крестовиной 7 и траверсами 8, а другие соединены растяжкой 9,
На направляющем элементе 6 установлена грузонесущая каретка 10 с приводом 11 ее горизонтального переме щения. Направляющий элемент 5 расположен в вертикальной плоскости перпендикулярно порталу 1 и связан с приводом 12 вертикального перемещения каретки 10, Каретки 4 и 10 снабжены двумя группами роликов 13 и .14, причем ролики 13 имеют цилиндрическую опорную поверхность, а опорная поверхность роликов 14 образована конической канавкой.
Датчики 15 расположены на каретках 4 и 10 с возможностью взаимодействия с кодовыми пластинками 16, установленными на направляющих элементах 5 и 6, Перемещение каретки 4 осуществляется приводом 17,
Манипулятор работает следующим образом.
Включением привода 17, который взаимодействует с зубчатой рейкой 3 портала 1, каретка 4 перемещается вдоль портала 1 по направляющей 2 посредством опорных роликов 14, обеспечивающих безлюфтовое переме- щенне. Цилиндрические опорные ролики 13, опираясь на тйпьную поверхность зубчатой рейки 3, обеспечивают фиксированное положение каретки 4 относительно портала 1,
94
Включением привода It груэонесу щая каретка )0 перемещается по на- прав;шю1цему элементу б в направления,
перпендикулярном перемецению каретки 4. Опорные ролики 14 каретки Ю обеспечивают беэлюфтовое перемещение а опорные ролики 13 обеспечивают фиксированное положение груэонесущей каретки 10 относительно направляющего элемента б. Включением привода 12 направляющий элемент 5 и каретка 10 перемещаются в вертикальной плоскости. Ролики 14 обеспечивают
безлюфтовое перемещение направляющего элемента 5. Ролики 3 выполнены ц|{линдрическими н обеспечивают фиксированное положение направляющего элемента 5 относительно каретки 10,
Управление работой приводов И, 12 и I7 осуществляется системой управления, выполненной с возможностью переадресации двоичным кодом. Управление по точкам адресов, задаиных в двоичиом коде в виде установочных кодовых пластинок 16, пронзводнтся в две ступени.
При входе датчика 15 в зону кодовой пластинки 16 (положение Б на
фиг, 1) в систему управления посылается (например, импульс напряжения 24 Н), которая запоминается оперативной памятью, и в этот момент формируется выключение электропривода. Подвижный орган манипулятора каретки или направляющий элемент продолжает перемещение по инерции. При выходе кодовой пластинки 16 из зоны датчика 15 (положение В на фиг, 4)
в систему управления посылается О, формируется сигнал для торможения движения любым известным способом.
Таким образом, управление движением происходит двухступенчато, что
позволяет получить высокую точность позиционирования подв:1жных органов манипулятора по адресам и повьщ1енную надежность работы за счет уменьшения инерционных сил и удариых нагрузок,
Перестановкой кодовых пластинок 16 можно быстро перепрограммировать работу манипулятора,
Использованне двоичного кода дает возможность получить большое количество адресов при минимальном числе датчиков по зависимости
2tTl -1,
где п - общее число адресов по каждой координате;
ш число датчиков .Так например, при 4 датчиках, на- бр аккых в гребенку (фиг. 3} можно получить
п-2 - -I6-l I5 адресов. Система упра аления, работамщая в данном варианте, легко сопрягается с микропроцессором или ЭВМ.
Формула изобретения
I. Манипулятор, содержащий портал с кареткой, расположенной на направляющих, и грузонесущую каретку с при-15 водом ее вертикального перемещения, расположенньм на каретке портала, отличающнЛся тем, что, с цепью распшрения технологических возможностей за счет увеличения сте- 20 пеней подвижности, он снабжен двумя направляющими элементами, располо- женньа4и взаимно перпендикулярно.
1511109
одни концы которых жестко сипчлпы между собой, а другие соединены растяжкой, и ПрИв оДОМ ГОРИЗОНТАЛЬНОГО
. перемещения грузовой каретки, при этом один из направляющих элемеитов расположен в вертикальной плоскости перпендикулярно порталу и связан с приводом вертикального перемещения
10 грузовой кареткн, а сама грузонесу- щая клретка и привод ее горизонтального перемещения yctaHOBneHu на другом направляющем элементе.
2, Манипулятор поп, I, отличающийся тем, что каретки снабжены двумя группами роликов, установленных на напряйляющих элементах, при этом ролики одной из групп, имеют цилиндрическую опорную поверхность, а опорная поверхность роликов другой группы образована конической Канавкой,
2, Манипулятор поп, I, отличающийся тем, что каретки снабжены двумя группами роликов, установленных на напряйляющих элементах, при этом ролики одной из групп, имеют цилиндрическую опорную поверхность, а опорная поверхность роликов другой группы образована конической Канавкой,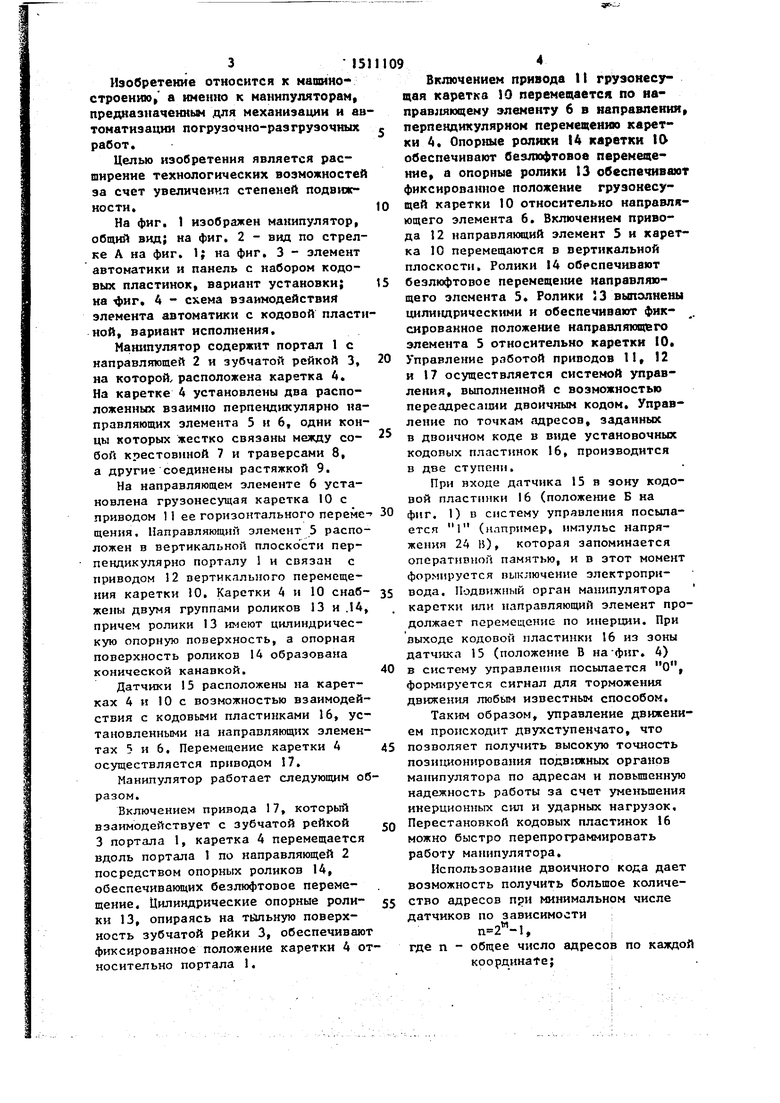

| название | год | авторы | номер документа |
|---|---|---|---|
| ПОРТАЛЬНЫЙ РОБОТ БЕЛЯЕВА Н.П. | 1992 |
|
RU2080243C1 |
| ПОРТАЛЬНЫЙ РОБОТ | 1988 |
|
RU2022770C1 |
| ЛАЗЕРНАЯ МАШИНА ДЛЯ РЕЗКИ ПЛОСКИХ ЗАГОТОВОК | 1992 |
|
RU2032514C1 |
| ПОДЪЕМНО-ТРАНСПОРТНЫЙ АГРЕГАТ | 1997 |
|
RU2112736C1 |
| МАНИПУЛЯТОР ДЛЯ ОЧИСТКИ ВАГОНОВ С ДВУХСКАТНЫМ ПОЛОМ | 1989 |
|
RU2026215C1 |
| СТЫКОВОЧНЫЙ АГРЕГАТ | 2007 |
|
RU2341447C1 |
| Портальный манипулятор | 1985 |
|
SU1303402A1 |
| Устройство для автоматической сварки угловых соединений | 1990 |
|
SU1764915A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ СВАРКИ | 2005 |
|
RU2294274C1 |
| РОБОТИЗИРОВАННЫЙ ПОРТАЛ ДЛЯ ЛАЗЕРНОЙ РЕЗКИ И СВАРКИ ТРУБНЫХ ЦИЛИНДРИЧЕСКИХ ЗАГОТОВОК | 2018 |
|
RU2697686C1 |
Изобретение относится к машиностроению, а именно к манипуляторам, предназначенным для механизации и автоматизации погрузочно-разгрузочных работ. Целью изобретения является расширение технологических возможностей за счет увеличения степеней подвижности. Манипулятор имеет три программируемые степени подвижности в системе декартовых координат благодаря наличию направляющих элементов 5 и 6, смонтированных на каретке 4 с возможностью перемещения в вертикальной плоскости, и грузонесущей каретки 10, смонтированной на направляющем элементе 6. Система управления манипулятором выполнена с возможностью переадресации в двоичном коде. 1 з.п. ф-лы, 4 ил.
Фаг./
. N ЧХ
фиг. Ц
Составитель Ф. Майоров Редактор Л. Веселовская Техред М.Ходанич °PP L lli :T.lt
Заказ 5846/20
Тираж 778
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР П3035, Москва, Х-35, Раушская наб., д. А/5
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина, 101
15
Фиг.З
Подписное
| Поверхностный конденсатор | 1926 |
|
SU8005A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
