Изобретение относится к машиностроению, а именно к портальным манипуляторам, предназначенным для межоперационных перемещений заготовок, и может быть использовано при работе в автоматизированных станочных комплексах и автоматических линиях.
Цель изобретения - расширение технологических возможностей путем увеличения зоны обслуживания и повышение надежности при межоперационных перемещениях с тяжелым грузом.
На фиг. 1 показан манипулятор, обший вид; на фиг. 2 - то же, вид сбоку.
Манипулятор содержит подвижную вдоль портала каретку 1 с опорной стойкой 2. Каретка 1 снабжена ходовыми катками 3, а на стойке 2 смонтирован опорный ролик 4. Оси катков 3 и ролика 4 взаимно перпендикулярны. Устройство подъема и опускания грузозахватного механизма представляет собой отклоняющуюся раму, состоящую из двух щек 5, прикрепленных к нижнему валу 6, размещенному в опорах на каретке 1. Щеки 5 рамы несут размещенный в опорах верхний вал 7. На Каретке 1 жестко закреплено зубчатое колесо 8, а на верхнем валу 7 - зубчатое колесо 9. Зубчатые колеса 8 и 9 связаны между собой промежуточными зубчатыми колесами 10. Зубчатое колесо 11, закрепленное на нижнем валу 6, кинематически связано с зубчатым колесом 12, соединенным с валом привода 13. Нривод 14 служит для перемещения каретки 1 по рельсовому пути 15 портала 16. На верхнем валу 7 отклоняющейся рамы закреплен грузозахватный механизм 17 с приводом его поворота 18 и приводом 19 управления захватами. Верхняя направляющая 20 портала имеет П-об- разное сечение и является направляющей для опорного ролика 4.
Манипулятор работает следующим образом.
Для продольного перемещения каретки манипулятора включают привод 14, который приводит во вращение ходовой каток 3. Перекатываясь по продольному рельсовому пути 15, ходовой каток 3 перемещает каретку 1 с грузозахватным механизмом 17.
Для поперечной передачи манипулятором деталей включают привод 13, который через зубчатые колеса 12 и 11 приводит в движение вал б рамы. При этом отклоняющаяся рама начинает отклоняться влево или вправо в зависимости от направления вращения зубчатого колеса 11. Промежуточное зубчатое колесо 10 начинает обкатываться вокруг зубчатого колеса 8, жестко закрепленного на каретке 1. Так как зубчатые колеса 8 и 9 одинаковы, то при отклонении рамы грузозахватный механизм 17 сохраняет вертикальное положение при любых углах отклонения рамы в обоих направлениях. При этом происходит одновременное перемещение грузозахватного механизма 17 с деталью в горизонтальной и вертикальной плоскостях, а угол между осью стойки 2 и плоскостью рамы равен углу между этой плоскостью и продольной осью механизма 17. Направляющая 20 образует верхнюю опору, так как ролик 4 опирается в ее боковые стенки.
Формула изобретения
Портальный манипулятор, содержащий подвижную по рельсовому пути вдоль портала каретку, грузозахватный механизм и привод его перемещения, отличающийся тем, что, с целью расщирения технологических возможностей путем увеличения зоны
обслуживания и повышения надежности при межоперационных перемещениях с тяжелым грузом, он снабжен расположенной на каретке стойкой и рамой, установленной на этой каретке в опорах вращения и имеющей индивидуальный привод ее поворота в плоскости; перпендикулярной рельсовому пути, вал, установленный также в опорах вращения в боковых стенках рамы, и зубчатую передачу, одно из колес которой жестко связано с этим валом, а другое - с
кареткой, при этом грузозахватное устройство расположено на указанном валу рамы, на портале смонтирована дополнительно введенная П-образная направляющая, а на стойке - ролик, контактирующий с боковыми сторонами направляющей и образующий с ней дополнительную опору.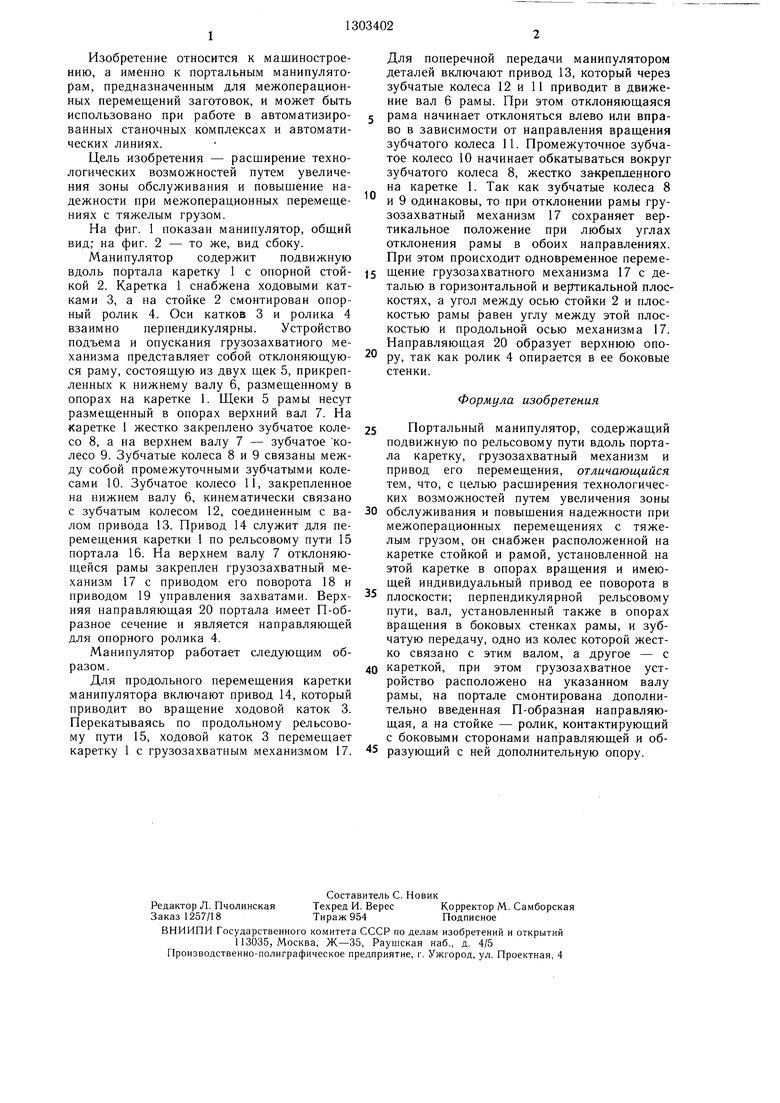
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕНТОЧНО-ПИЛЬНЫЙ СТАНОК | 1998 |
|
RU2139182C1 |
| САМОХОДНАЯ УСТАНОВКА ДЛЯ ВОЗВЕДЕНИЯ АНКЕРНОЙ КРЕПИ | 2021 |
|
RU2765002C1 |
| Стенд для испытаний приводной тележки башенного крана | 1989 |
|
SU1796958A1 |
| Линия для обработки листовых заготовок | 1990 |
|
SU1784369A1 |
| Каретка буровая портальная | 1977 |
|
SU754056A1 |
| УСТАНОВКА ДЛЯ ФОРМОВАНИЯ ИЗДЕЛИЙ ИЗ БЕТОННЫХ СМЕСЕЙ | 1991 |
|
RU2047483C1 |
| ПОРТАЛЬНАЯ БУРОВАЯ КАРЕТКА | 1973 |
|
SU361279A1 |
| ЛЕНТОЧНО-ПИЛЬНЫЙ СТАНОК | 2002 |
|
RU2211137C1 |
| Штабелер для обслуживания полочных стеллажей | 1982 |
|
SU1031860A1 |
| Устройство для передачи форм вагонеток | 1978 |
|
SU735402A1 |
Изобретение относится к машиностроению и может- быть использовано для межоперационных перемещений заготовок в автоматизированных станочных комплексах и автоматических линиях. Цель изобретения - расширение технологических возможностей за счет увеличения зоны обслуживания и повышение надежности при межоперационных перемещениях. Подвижная вдоль портала 16 каретка 1 имеет грузозахватный механизм 17 и устройство его подъема и опускания, выполненное в виде отклоняющейся рамы, имеющей вращающиеся валы 6 и 7. На каретке 1 и валу 7 смонтированы одинаковые зубчатые колеса 8 и 9, образующие с промежуточными зубчатыми колесами 10 передачу для сохранения вертикального положения грузозахватного механизма 17. Портал имеет направляющую 20 П-образного сечения, в которой расположен опорный ролик 4. При отклонении рамы ролик 4 упирается в боковые стенки направляю щей 20, которая образует для рамы верхнюю опору. 2 ил. - о $е 1с/)
| Манипулятор | 1975 |
|
SU524685A2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| АВТООПЕРАТОР^ i.;0 | 1972 |
|
SU424689A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
