S
(Л
СП
и 3 корпуса 1, на который действуют силы сопротивления внешней среды. Каждый Д 2 и 3 механически независимо соединен соответственно с одним из однотипных электродвигателей 7 и 8, которые связаны с источником 9 электроэнергии и между собой электрической связью формирователя 10 синхронно-импульсных токов переменного направления. При этом электродвигатели 7 и 8 подключены своими силовыми цепями к формирователю 10 токов встречно и последовательно. С корпусом 1 жестко связан узел 11 стартовой раскачки и стабилизации частоты вращения Д 2 и 3. С формирователем 10 токов посредством выключателя 13 связан дроссель 12, служащий для повыщения устойчивости работы вибровозбудителя при пуске. При работе вибровозбудителя формирование синхронно-импульсных токов переменного направления осуществляется поочередной разрядкой через силовые цепи электродвигателей 7 и 8 емкостных накопителей 16 и 17 энергии ускорения и за медления вращения Д 2 и 3 по сигналу датчиков 20 и 21 положения Д 2. Вращение Д 2 и 3 с переменной скоростью в зависимости от угла их поворота относительно корпуса 1 обеспечивает разную величину амплитуды инерционных усилий, действующих на вибровозбудитель в противоположных направлениях. Это в свою очередь позволяет перемещаться объекту с таким вибровозбудителем даже в изотропном поле сил трения об окружающую среду. Использование электрической связи Д 2 и 3 с источником 9 электроэнергии без применения громоздких рычажных и тяговых узлов, имеющихся в прототипе, обеспечивает компактность вибровозбудителя, повыщение его безотказности, долговечности и управляемости. 1 3. п. ф-лы, 6 ил.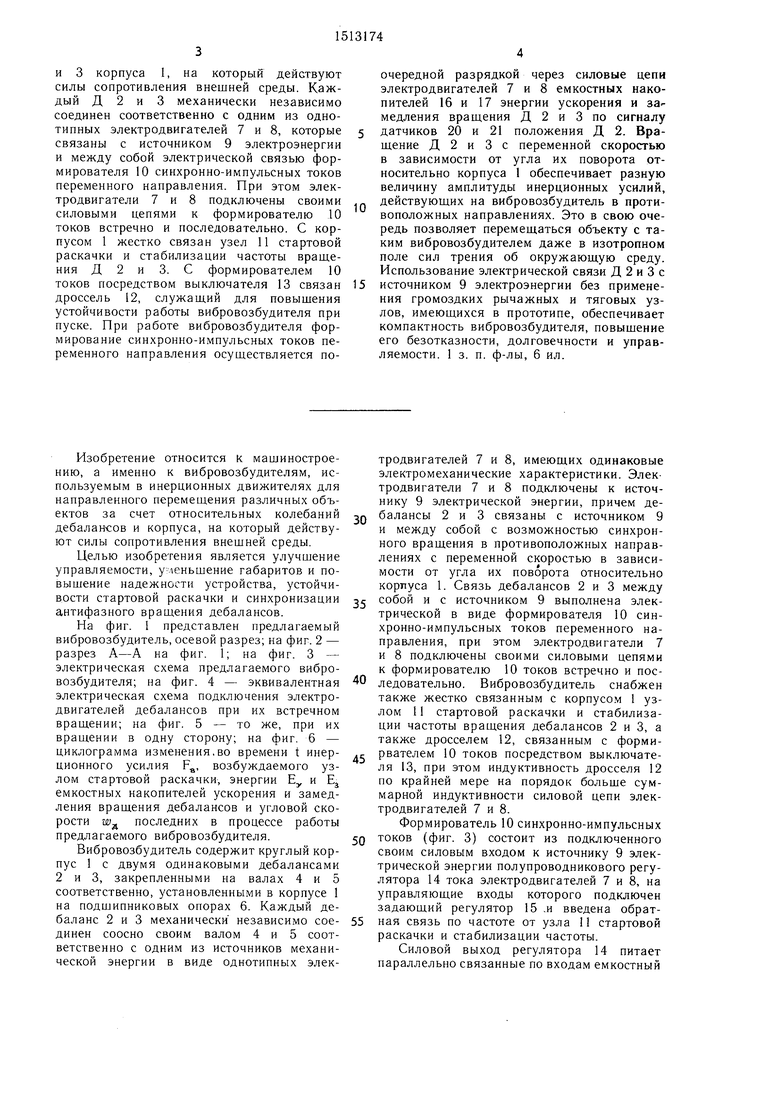
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЕРЦИОННЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2123133C1 |
| ИНЕРЦИОННЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2124143C1 |
| Вибратор с резонансной настройкой | 2022 |
|
RU2816833C1 |
| Устройство управления вибрационной машиной с двумя дебалансными вибровозбудителями | 2023 |
|
RU2814668C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ И ПОДДЕРЖАНИЯ РЕЗОНАНСНЫХ РЕЖИМОВ КОЛЕБАНИЙ ВИБРАЦИОННОЙ МАШИНЫ С ПРИВОДОМ ОТ АСИНХРОННОГО ДВИГАТЕЛЯ | 2014 |
|
RU2589639C1 |
| Устройство для возбуждения колебаний | 1989 |
|
SU1738378A1 |
| СПОСОБ УПРАВЛЕНИЯ АМПЛИТУДОЙ ПРИ АВТОМАТИЧЕСКОЙ НАСТРОЙКЕ НА РЕЗОНАНСНЫЙ РЕЖИМ КОЛЕБАНИЙ ВИБРАЦИОННОЙ МАШИНЫ С ПРИВОДОМ ОТ АСИНХРОННОГО ДВИГАТЕЛЯ | 2017 |
|
RU2653961C1 |
| СИСТЕМА ГЕНЕРИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 2014 |
|
RU2567112C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ РЕЗОНАНСНЫХ РЕЖИМОВ КОЛЕБАНИЙ ВИБРАЦИОННОЙ МАШИНЫ С ПРИВОДОМ ОТ АСИНХРОННОГО ДВИГАТЕЛЯ | 2014 |
|
RU2572657C1 |
| УПРАВЛЯЕМЫЙ ДЕБАЛАНСНЫЙ УЗЕЛ | 2005 |
|
RU2310520C2 |
Изобретение относится к машиностроению и позволяет улучшить управляемость, уменьшить габариты и повысить надежность вибровозбудителей, используемых в инерционных движителях для направленного перемещения различных объектов за счет относительных колебаний дебалансов (Д) 2 и 3 и корпуса 1, на который действуют силы сопротивления внешней среды. Каждый Д 2 и 3 механически независимо соединен соответственно с одним из однотипных электродвигателей 7 и 8, которые связаны с источником 9 электроэнергии и между собой электрической связью формирователя 10 синхронно-импульсных токов переменного направления. При этом электродвигатели 7 и 8 подключены своими силовыми цепями к формирователю 10 токов встречно и последовательно. С корпусом 1 жестко связан узел 11 стартовой раскачки и стабилизации частоты вращения Д 2 и 3. С формирователем 10 токов посредством выключателя 13 связан дроссель 12, служащий для повышения устойчивости работы вибровозбудителя при пуске. При работе вибровозбудителя формирование синхронно-импульсных токов переменного направления осуществляется поочередной разрядкой через силовые цепи электродвигателей 7 и 8 емкостных накопителей 16 и 17 энергии ускорения и замедления вращения Д 2 и 3 по сигналу датчиков 20 и 21 положения Д 2. Вращение Д 2 и 3 с переменной скоростью в зависимости от угла их поворота относительно корпуса 1 обеспечивает разную величину амплитуды инерционных усилий, действующих на вибровозбудитель в противоположных направлениях. Это в свою очередь позволяет перемещаться объекту с таким вибровозбудителем даже в изотропном поле сил трения об окружающую среду. Использование электрической связи Д 2 и 3 с источником 9 электроэнергии без применения громоздких рычажных и тяговых узлов, имеющихся в прототипе, обеспечивает компактность вибровозбудителя, повышение его безотказности, долговечности и управляемости. 1 з.п. ф-лы, 6 ил.
Изобретение относится k мащинострое- нию, а именно к вибровозбудителям, используемым в инерционных движителях для направленного перемещения различных объектов за счет относительных колебаний дебалан-сов и корпуса, на который действуют силы сопротивления внещней среды.
Целью изобретения является улучшение управляемости, у леньщение габаритов и повышение надежности устройства, устойчивости стартовой раскачки и синхронизации антифазного вращения дебалансов.
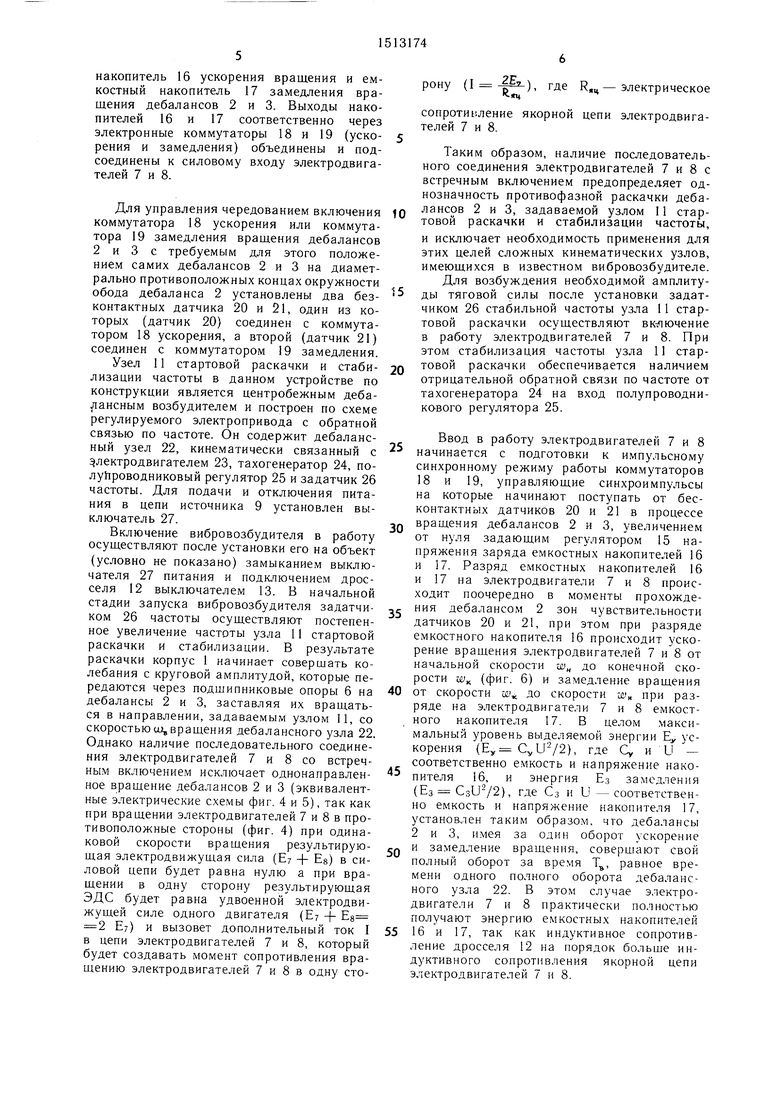
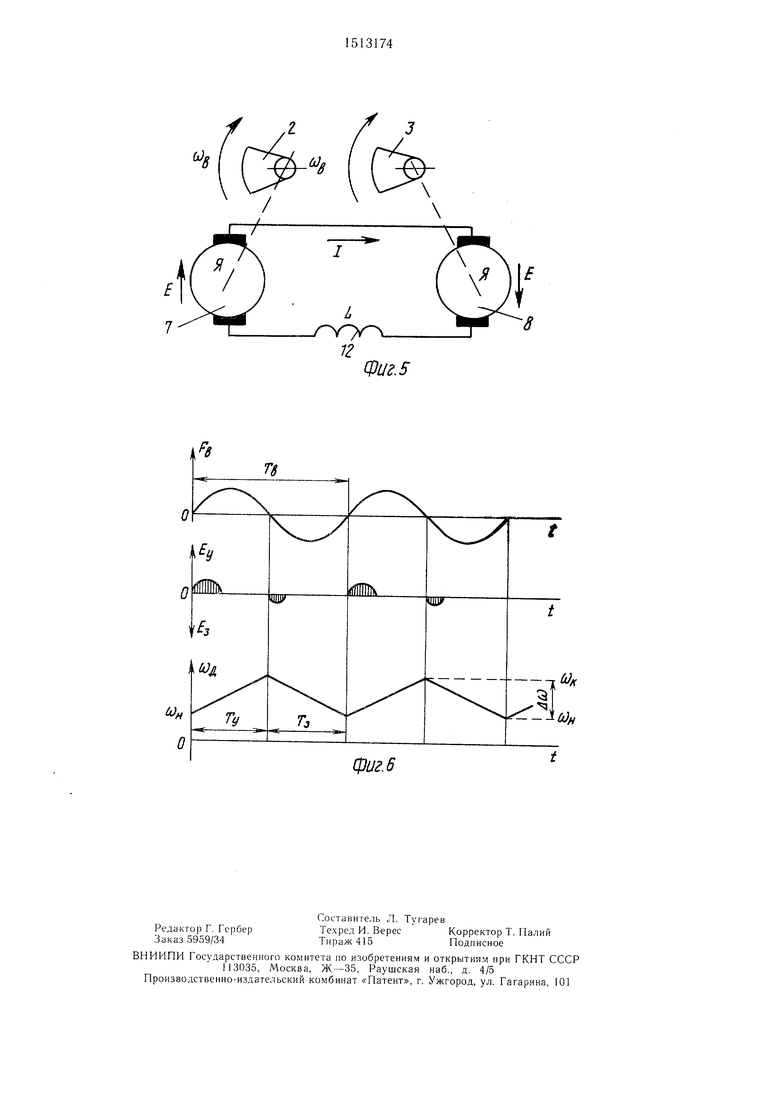
На фиг. 1 представлен предлагаемый вибровозбудитель, осевой разрез; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - электрическая схема предлагаемого вибровозбудителя; на фиг. 4 - эквивалентная электрическая схема подключения электродвигателей дебалансов при их встречном вращении; на фиг. 5 - то же, при их вращении в одну сторону; на фиг. 6 - циклограмма изменения,во времени t инерционного усилия F, возбуждаемого узлом стартовой раскачки, энергии Е и Е емкостных накопителей ускорения и замедления вращения дебалансов и угловой скорости 10Д последних в процессе работы предлагаемого вибровозбудителя.
Вибровозбудитель содержит круглый корпус 1 с двумя одинаковыми дебалансами 2 и 3, закрепленными на валах 4 и 5 соответственно, установленными в корпусе 1 на подшипниковых опорах 6. Каждый де- баланс 2 и 3 механически независимо соединен соосно своим валом 4 и 5 соответственно с одним из источников механической энергии в виде однотипных элек0
5
тродвигателей 7 и 8, имеющих одинаковые электромеханические характеристики. Электродвигатели 7 и 8 подключены к источнику 9 электрической энергии, причем де- балансы 2 и 3 связаны с источником 9 и между собой с возможностью синхронного вращения в противоположных направлениях с переменной скоростью в зависимости от угла их поворота относительно корпуса 1. Связь дебалансов 2 и 3 между собой и с источником 9 выполнена электрической в виде формирователя 10 синхронно-импульсных токов переменного направления, при этом электродвигатели 7 и 8 подключены своими силовыми цепями к формирователю 10 токов встречно и пос0 ледовательно. Вибровозбудитель снабжен также жестко связанным с корпусом 1 узлом 11 стартовой раскачки и стабилизации частоты вращения дебалансов 2 и 3, а также дросселем 12, связанным с формиг рвателем 10 токов посредством выключателя 13, при этом индуктивность дросселя 12 по крайней мере на порядок больше суммарной индуктивности силовой цепи электродвигателей 7 и 8.
Формирователь 10 синхронно-импульсных
0 токов (фиг. 3) состоит из подключенного своим силовым входом к источнику 9 электрической энергии полупроводникового регулятора 14 тока электродвигателей 7 и 8, на управляющие входы которого подключен задающий регулятор 15 .и введена обрат5 ная связь по частоте от узла 11 стартовой раскачки и стабилизации частоты.
Силовой выход регулятора 14 питает параллельно связанные по входам емкостный
накопитель 16 ускорения вращения и емкостный накопитель 17 замедления вращения дебалансов 2 и 3. Выходы накопителей 16 и 17 соответственно через электронные коммутаторы 18 и 19 (уско- рения и замедления) объединены и подсоединены к силовому входу электродвигателей 7 и 8.
Для управления чередованием включения коммутатора 18 ускорения или коммутатора 19 замедления вращения дебалансов 2 и 3 с требуемым для этого положением самих дебалансов 2 и 3 на диаметрально противоположных концах окружности обода дебаланса 2 установлены два без- контактных датчика 20 и 21, один из которых (датчик 20) соединен с коммутатором 18 ускорения, а второй (датчик 21) соединен с коммутатором 19 замедления.
Узел 11 стартовой раскачки и стаби- лизации частоты в данном устройстве по конструкции является центробежным деба- лансным возбудителем и построен по схеме регулируемого электропривода с обратной связью по частоте. Он содержит дебаланс- ный узел 22, кинематически связанный с электродвигателем 23, тахогенератор 24, полупроводниковый регулятор 25 и задатчик 26 частоты. Для подачи и отключения питания в цепи источника 9 установлен выключатель 27.
Включение вибровозбудителя в работу осуществляют после установки его на объект (условно не показано) замыканием выключателя 27 питания и подключением дросселя 12 выключателем 13. В начальной стадии запуска вибровозбудителя задатчи- ком 26 частоты осуществляют постепенное увеличение частоты узла 11 стартовой раскачки и стабилизации. В результате раскачки корпус 1 начинает совершать колебания с круговой амплитудой, которые передаются через подшипниковые опоры 6 на дебалансы 2 и 3, заставляя их вращаться в направлении, задаваемым узлом II, со скоростьюси вращения дебалансного узла 22. Однако наличие последовательного соединения электродвигателей 7 и 8 со встречным включением исключает однонаправленное вращение дебалансов 2 и 3 (эквивалентные электрические схемы фиг. 4 и 5), так как при вращении электродвигателей 7 и 8 в противоположные стороны (фиг. 4) при одинаковой скорости вращения результирующая электродвижущая сила (Е/ + Eg) в силовой цепи будет равна нулю а при вращении в одну сторону результирующая ЭДС будет равна удвоенной электродвижущей силе одного двигателя (В -f- Е8 2 Е;) и вызовет дополнительный ток I в цепи электродвигателей 7 и 8, который будет создавать момент сопротивления вращению электродвигателей 7 и 8 в одну сто
лр
рону (I ), где электрическое
i)tU
5
0
0 5
0
5
5
0
сопротииление якорной цепи электродвигателей 7 и 8.
Таким образом, наличие последовательного соединения электродвигателей 7 и 8 с встречным включением предопределяет однозначность противофазной раскачки дебалансов 2 и 3, задаваемой узлом 11 стартовой раскачки и стабилизации частоты,
и исключает необходимость применения для этих целей сложных кинематических узлов, имеющихся в известном вибровозбудителе. Для возбуждения необходимой амплитуды тяговой силы после установки задат- чиком 26 стабильной частоты узла 11 стартовой раскачки осуществляют вк-лючение в работу электродвигателей 7 и 8. При этом стабилизация частоты узла И стартовой раскачки обеспечивается наличием отрицательной обратной связи по частоте от тахогенератора 24 на вход полупроводни- ко-вого регулятора 25.
Ввод в работу электродвигателей 7 и 8 начинается с подготовки к импульсному синхронному режиму работы коммутаторов 18 и 19, управляющие синхроимпульсы на которые начинают поступать от бесконтактных датчиков 20 и 21 в процессе вращения дебалансов 2 и 3, увеличением от нуля задающим регулятором 15 напряжения заряда емкостных накопителей 16 и 17. Разряд емкостных накопителей 16 и 17 на электродвигатели 7 и 8 происходит поочередно в моменты прохождения дебалансом 2 зон чувствительности датчиков 20 и 21, при этом при разряде емкостного накопителя 16 происходит ускорение вращения электродвигателей 7 и 8 от начальной скорости ш„ до конечной скорости WK (фиг. 6) и замедление вращения от скорости w до скорости Л)„ при разряде на электродвигатели 7 и 8 емкостного накопителя 17. В целом максимальный уровень выделяемой энергии Е, ускорения (Еу С,), где Су и и - соответственно емкость и напряжение накопителя 16, и энергия ЕЗ замедления (Ез ), где Сз и U - соответственно емкость и напряжение накопителя 17, установлен таким образом, что дебалансы 2 и 3, имея за один оборот ускорение и замедление вращения, совершают свой полный оборот за время Т, равное времени одного полного оборота дебалансного узла 22. В этом случае электродвигатели 7 и 8 практически полностью получают энергию емкостных накопителей 16 и 17, так как индуктивное сопротивление дросселя 12 на порядок больше индуктивного сопротивления якорной цепи электродвигателей 7 и 8.
7
При устойчивой работе вибрЪвозбудителя дроссель 12 можно отключить выключателем 13. Вращение дебалансов 2 и 3 с переменной скоростью в зависимости от угла их поворота относительно корпуса 1 обеспечивает разную величину амплитуды инерционных усилий, действующих на устройство в противоположных направлениях. Это, в свою очередь, обеспечивает эффективную работу предлагаемого вибровозбудителя при его использовании в инерционных движителях, позволяя перемещаться объекту с таким вибровозбудителем даже в изотропном поле сил трения об окружающую среду.
Для изменения амплитуды тяговой силы необходимо изменить энергию, запасаемую емкостными накопителями 16 и 17, что обеспечивается без остановки устройства изменением положения задающего регулятора 15. Описанное выполнение устройства позволяет без изменения кинематических цепей обеспечивать в процессе работы устройства гибкое регулирование частоты и амплитуды тягового усилия. Высокая степень жесткости устройства, отсутствие рычажных и тяговых кинематических узлов, имеющихся в известном вибровозбудителе, благоприятно влияют на повыщение безотказности и долговечности устройства.
Простота конструкции и компактность устройства обеспечиваются за счет применения электрических систем регулирования и управления. Это позволяет значительно повысить частоту, возбуждаемую устройством, и обеспечить защиту устройства от разрушения.
гз
8
Формула изобретения
вращения в противоположных направлениях с переменной скоростью в зависимости от угла их поворота относительно корпуса, отличающийся тем, что, с целью улучще- ния управляемости, уменьшения габаритов и повышения надежности, он дополнительно
снабжен жестко связанным с корпусом узлом стартовой раскачки и стабилизации частоты вращения дебалансов и еще одним однотипным электродвигателем, каждый де- баланс механически независимо соединен с
одним из электродвигателей, связь дебалансов между собой и с источником энергии выполнена электрической в виде формирователя синхронно-импульсных токов переменного направления, при этом электродвигатели подключены к формирователю
токов встречно и последовательно.
(Og
CPU г. 2
Фиг.
OJ
Фид.5
фиг. 6
| ДВИЖИТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА | 0 |
|
SU347232A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
| Инерционный двигатель | 1980 |
|
SU939817A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
