1
Изобретение относится к машиностроению и может быть использовано в качестве привода поступательного движения исполнительного органа механизмов и маитн и в качестве двигателя транспортных средств.
Наиболее близким к предлагаемому является инерционный двигатель, содержащий опору и установленный на ней с возможностью поворота вокруг оси корпуса с размещенными на ней двумя одинаковыми дебаланснымн грузами, соединенными передачей «с приводным валом, установленными на кривошиг пах симметрично относительно плоскости с возможностью синхронного вращения в противоположных направлениях 1 .
Недостаток известного двигателя заключается в малой величине амплитуды тягового усилия в направлении перемещения, ограничений вследствие наклона направления действия этого усилия к направлению перемещения и постоянного значения центробежной силы, действующей на каждый грр, из-за постоянной скорости вращения кривощнпов грузов.
Цель язибрстення - увеличение амплн /ды тягового усилия.
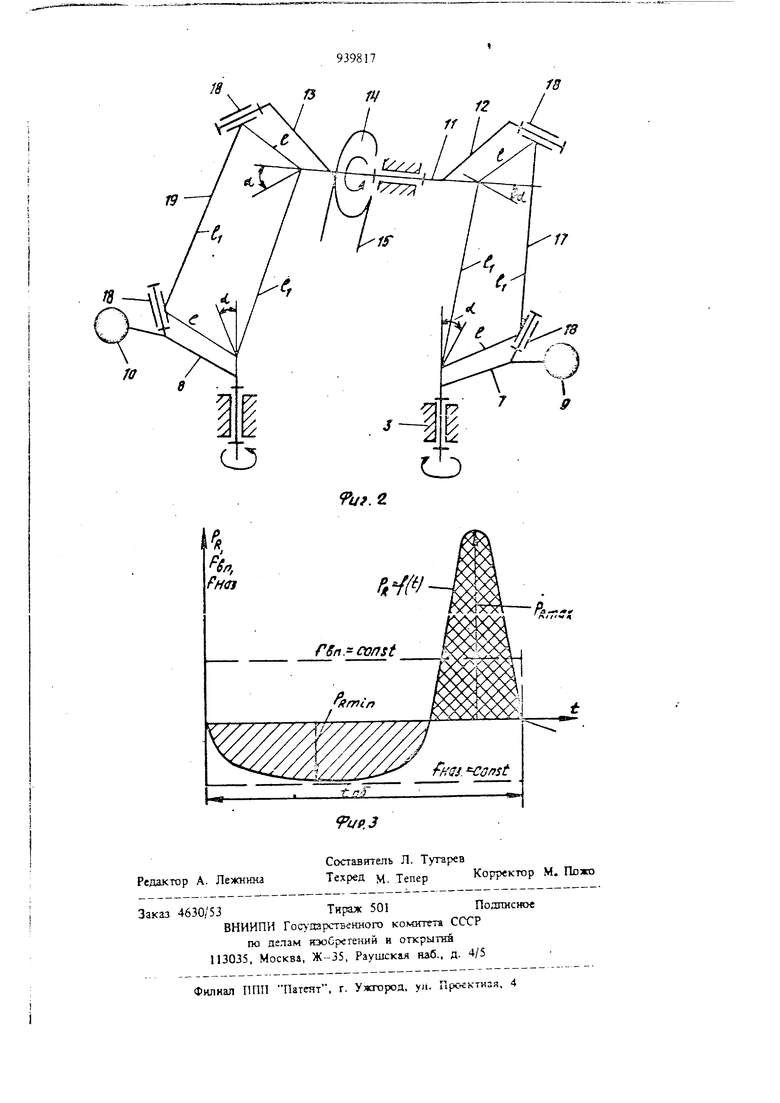
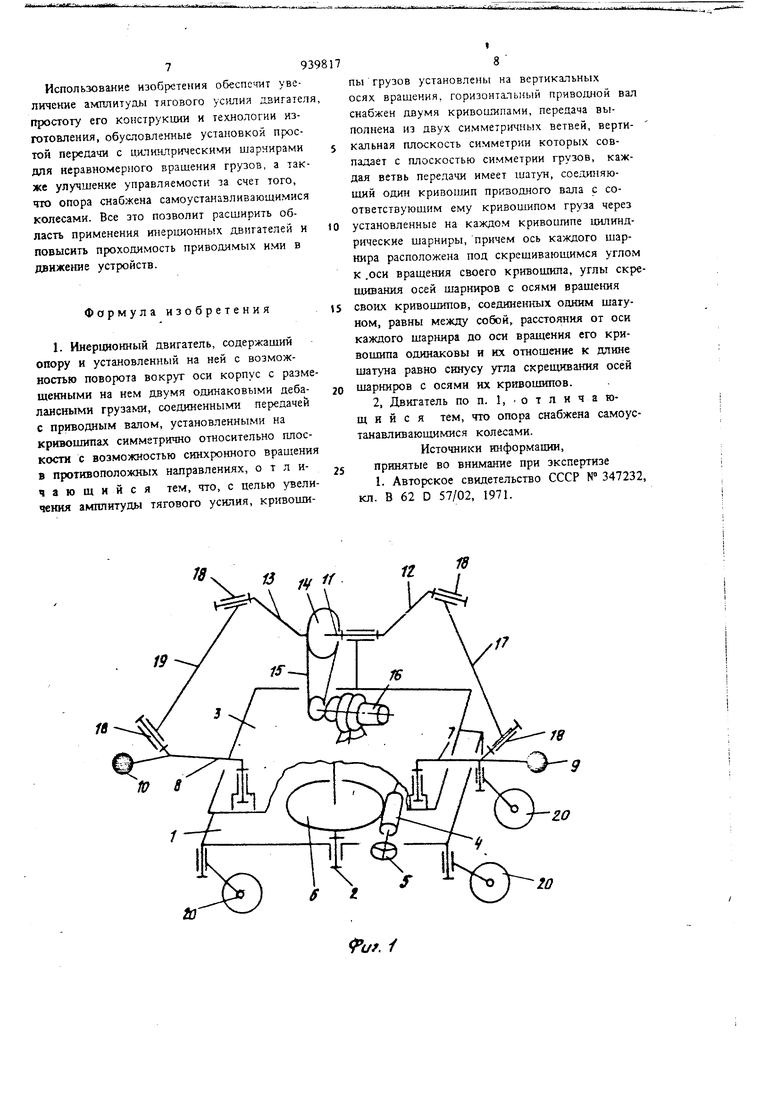
Указанная цель достигается тем, что кривошипы грзэов установлены на вертикальных осях вращения, горизонтальной приводной вал снабжен двумя кривошипами, передача выполнена из двух симметричных ветвей, вер тикальная плоскойь симметрии которых совпадает с плоскостью симметрии грузов, каждая ветвь передачи имеет щатун, соединяющий один кривощип приводного вала с соответствующим ему кривошипом груза через устаноапенные на каждом кривощипе цилиндрически шарниры, причем ось каждого шарнира расположена под скрещивающимся узлом к оси вращения своего . кривошипа, углы скрещивания осей шарниров с осями вращения своих кривощипов, соединенных одним щатуном, равны между собой, расстояния от оси каждого шарнира до оси вращения его кривошипа одинаковы и их отношение к длине шатуна равно синусу угла скрещивания oceji шарниров с осями ях кривощипов. 3. Опора снабжена с;(мо С1аиав;1ии:1К1|11имисч колесами. Такое выполнение устройства обеспечивасг неравномерное вращение кривошипов ц; при равномерном вращении принояного вала за счет чего достигается увеличение амилшуды центробежных тяговых усн.ий, действ юших на при максимальном значении скорости их вран1ения в моменг максимального смещения грузов в сторону ттеремешения приводимых двигате1тем устройств. Уве;пичению амгтлитудьт тюлезного тягового усили ;пособствует также то, что направление дейст вия максимального по величине тягового усилия в предлагаемом инерщтонном двигате ле совпадает с направлением движения воспринимающих это усилие устройств. На фиг. 1 схематично представлен предлагаемый инерционный двигатель, обтиий вид на фиг. 2 -- схема передачи, соединяюитей кривои.гапы грузов с приводлым валом, с обозначением размеров элементов передачи; на фиг. 3 - график изменетшя су.ммарного инерциошюго тягового усилия двигателя за полный оборот приводного вала с учетом действия сил трения опоры о поверхность, по которой перемешается приводимое в дви жение устройство. Двигатель содержит опору 1 и установлен ный на ней с возможностью поворота вокр) оси 2 корпус 3. Поворотное устройство кор са 3 может быть выполнено, например, в ви де червячной передачи, включающей червяк 4, при среплрнншй к ру.левому колесу 5, и червячное колесо 6, прикрепленное к корпусу 3. На корпусе 3 установлены Tia кривош пах 7 и 8 два одинаковых дебалансных гру 9 и 10 с возможтюстью синхронного врашения в противоположных направлениях вокру вертикальных осей симметрично относительно вертикальной плоскости. Грузы 9 и 10 соединены передачей с горизонтальным приводным валом 11, снабженным двумя кривошипами 12 и 13. На вхпуМ жестко закрештено зуичаюе колесо {гля шкив) 14, соединенное с цепью (или ремне.м) 15 с приводным двигателем 16. Передача выполнена из двух симметричных ветвей, вертикальная плоскость симметрии которых совпадает с плocкocfью симметрии грузов. Пра вая ветвк передачи имеет uiaTy i 17, соединяющий кривошип 12 привод 1ого вала 11 С соответствующим ему кривошипом 7 груза 9 через сгановлент1ые на каждом кривошипе пит1.1р1иеские иприиры 18, причем иск ка:кдого шарнира 1Я расположена под скрешичанчлимся NTIOM а к оси вращения сноег1 кривошитта. Углы скреширзним л oi-ей шлрниров I- с осями прашенпн своих крииишниов / и 12. соединенных шаrvHOM 1 /, pjBHbi между соГнп), расстояния I от оси каждою нирнира 18 до оси врашенич ею кривошипа 7 и 12 о.динаковы иих отношение к длине шатуна I, равно .синусу угла ск)сн1ивания а осей шариир 5в 18 с осями их кривоишпов 7 и 12. 1/11 sin ft(1) При таком вьшолнении размеров передачи расстояние между осью врашения приводного вала 11 и осью врашения кривоншпа каждого груза равно длине шатуна I, и оси шарниров, соединенных одним шатуном, расположены под углом 90° друг к другу. Левая ветвь передачи симметрична правой ее ветви относительно вертикальной плоскости во всех фазах их движения и содержит соответственно шатун 19, соединяющий кривошип 13 приводного вала 11 с кривошипом 8 груза 10 через шарниры 18, установленные на крийо лпах 8 и 13.:Опора 1 снабжена самоустанавливаюшимися колесами 20. Устройство работает следуюшим образом. От приводного двигателя 16 вращение передается через цепь (ремень) 15 колесу (шкиву) 14 и приводному валу 11. Кривошипы 12 и 13 приводного вала 11 передают вращение кривошиттам 7 и 8 грузов 9 и 10 через передачу, вкJTЮчaюшyю шатуны 17 и 19 и цилиндрические шарнирьт 18. Равномерное вращение приводного вала 11 при описанном выше вьшолнении передачи преобразуется в синхронное вращение грузов 9 и 1U в противоположных направлениях с неравномерной угловой скоростью за оборот. Максимальное и минимальное значения угловой скорости врашения кривошипов 7 и 8 зависят от величины угла скреишвания а осей шарниров с осями вращения их кривошипов и определяются выражениями; и;„„(1, ах -l-sinoL -«-sividггте со ср. - средняя угловая скорость вращения кривоитипов грузов, равная скорости вратцения приводного вала 11; U- максимхтьная скорость врашения кривотнипов гр -зов; uj.- - минимальная скорость нрашения кривошипов грузов; а - угол скрещивания осей шарниров 18 с осями ) их кривоипшоп. 5 При прошении каж;ш1и из ipvioB и iO возиикае инерционная си IH 1, ik ро,ч;1п;1смия через крив1)1)и111.| 7 и 8 из Kopnvc .. Величина силы опрс.челиеюи выражением Р mw(4) величина инерииннного усилия; масса груза; полное ускорение вращающеюся iVco- - + е угловая скорость вращения груза; угловое ускорение при вращении груза; I -- расстояние от оси шарнира криво шипа груза до оси врашения посл него. В результате сложения векторов инерционных усилий, действующих на грузы 9 и 10, вследствие cиммeтpи moгo синхронного вращения грузов в противоположные стороны, составляющие инерционных усилий, действующих на равные грузы, направленные перпендикулярно к вертикальной- шюскости симметрии, взаимно уравновешиваются, а составляющие этих усилий, направленные параллельно плоскости симметрии, складываются, поэтому итоговое инершюнное усилие действует на корпус 3 в плоскости симметрии грузов по горизонтали. Направление действия этого усилия периодически изменяется на противоположное, при зтом максимальное по величине усилие, соответствующее максимальной скорости вращения грузов, направлено в сторону перемещения приводимой в движение опоры 1. а минимальное по величине усилие, соответствующее минимальной скорости вращения грузов направлено в противоположную сторону. На фиг. 3 обозначены: результирующее (итоговое) инерщюнное усапие Р , пол -чаемое в результате сложения векторов инерционных усилий, действующих на грузы 9 и 10; сила трения Fg опоры о поверхность, по которой она перемещается, в направлении движения устройства (вперед); сила трения Ffta опоры о поверхность, по которой она перемещается, препятствующая движению устройства в противоположном направлении (иаэад); время to6, соответствующее одно му обороту приво1хного вала 11 и грузов 9 к 10. Площадь, ограниченная кривой Рц f(t) н находящаяся над осью абсвдсс графика (фиг. 3), представляет собой импульс силы РЙ в направлении движения опорЫ, а площапь. играннчспная кривой ( f(t), нахоняишяся iiojt осью цПскисг этого 1ра({)Ика. пре.чстанлиет собой импу.и.с силы ,, в протинопо.чожиом направлении. В соответствии с законом сохр;1ненин ко.-шчества движения величины этих импульсов равны. Однако вслелствие нерав юмернос1И вращения грузов и существенного превышения а.матитуды силы Pf в маправ.чении перемещения опоры по сравнению с амплитудой этой силы в противоположном направлении при обеспечении величю)ы сил трения FB и Риаэ. равной и.чи немного большей амплитуды ctuibi Рд в направлении, противоположном движению опоры 1, действие силы Рд в этом направлении парируется силой трения Рназ. а сила PR в направлении движения лишь уменьшается на величину силы трения РВП.. так как максимальное значение силы в этом направлении существенно превышает величину Fan- В итоге полезный движущий импульс предлагаемого двигателя отображается на графике фиг. 3 площадью, ограниченной сверху кривой Р (t ), а снизу - прямой Fan const. В моменты, когда угловая скорость вращения грузов о; принимает максимальное и минимальное значения ,, и -, угловое ускорение if, равно нулю. Поэтому максимальное и минимальное значения силы инерции, действующей суммарно на оба груза предлагаемого двигателя, с учетом выражений (2), (3), (4) и (5) соответственно цЛ Рп,а.-и-в иа.)ср ССЛ%(. ,.1, . (7 Рщли (,М.} Для значений: m 10 кг, I 0,1 м, uj.p 10 с-, при а 20° Ртах 408 Н, 94 Н; при а 60° Рп,ах 2782 Н, 14 Н. Как видно из этого примера, с увеличением угла а скрещивания осей шарниров с осями вращения их кривошипов значительно увеличивается амплитуда тягового усилия. Значение угла а из конструктивных соображений желательно брать в пределах 10-65°. Для изменения направления движения поворачивают рулевое колесо 5, в результате чего корпус 3 через червячное колесо 6 поворачивается червяком 4 вокруг оси 2 относительно опоры 1. Этим достигается изменение направления действия тягового усилия двигателя. При изменении направления движения опоры 1 самоустанавлнвающиеся колеса 20 поворачиваются вдоль новой траектории движения.
7939817
Использование изобретения обеспечит увеличение амплитуды тягового усилия двигателя, простоту его конструкции и технологии изготовления, обусловленные установкой простой передачи с цилинлрит1ескимн шарнирами 5 для неравномерного вращения грузов, а также улучшение управляемости за счет того, что опора снабжена самоустанавливающимися колесами. Все это позволит расширить область применения инерционных двигателей и повысить проходимость приводимых ими в движение устройств.
Формула изобретения
1. Инерционный двигатель, содержащий опору и установленный на ней с возможностью поворота вокруг оси корпус с размешенными на нем двумя одинаковыми дебалаисными грузами, соединенными передачей с приводным валом, установленными на кривошипах симметрично относительно плоскости с возможностью синхронного вращения в противоположных направленнях, о т л ичающийся тем, что, с целью увеличения амплитуды тягового усилия, кривоши8
пы грузов установлены на вертикальных осях вращения, горизонтальный приводной вал снабжен двумя кривошипами, передача выполнена из двух симметротных ветвей, вертикальная плоскость симметрии которых совпадает с плоскостью симметрии грузов, каждая ветвь передачи имеет 1иатун, соедш1яющий один кривошип приводного вала с соответствующим ему кривощипом груза через установленные на каждом кривошипе цилиндрические шарниры, причем ось каждого шарнира расположена под скрещивающимся углом к .оси вращения своего кривошипа, углы скрещивания осей шарниров с осями вращения своих кривошипов, соединенных одним шатуном, равны между собой, расстояния от оси каждого шарнира до оси вращения его кривошипа одинаковы и их отношение к длине шатуна равно синусу угла скрещивания осей шарниров с осями их кривошипов.
2, Двигатель по п. 1,. о т л и ч а ющ и и с я тем, что опора снабжена самоустанавливающимися колесами.
Источники информации, принятые во внимание при зкспертизе 1. Авторское свидетельство СССР № 347232, кл. В 62 D 57/02, 1971.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПЛОТНЕНИЯ ГРУНТА | 2015 |
|
RU2583802C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ ВЕСТИБУЛЯРНОГО АППАРАТА | 2015 |
|
RU2602056C2 |
| Устройство для расчесывания меховых шкурок | 1987 |
|
SU1472513A1 |
| Гребное устройство для плавсредства | 1984 |
|
SU1235792A1 |
| Способ протравливания и устройство для осуществления способа | 1979 |
|
SU950216A1 |
| Устройство для гальванопластической обработки деталей | 1984 |
|
SU1186706A1 |
| Устройство для галтовки деталей | 1978 |
|
SU751593A1 |
| Устройство для жидкостной обработки изделий | 1979 |
|
SU883210A1 |
| Устройство для тренировки вестибулярного аппарата | 1987 |
|
SU1535558A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ ЖИДКОСТЕЙ | 2016 |
|
RU2633902C1 |