Изобретение относится к области автоматики и может использоваться в системах обработки изображений.
Цель изобретения - повышение точности устройства.
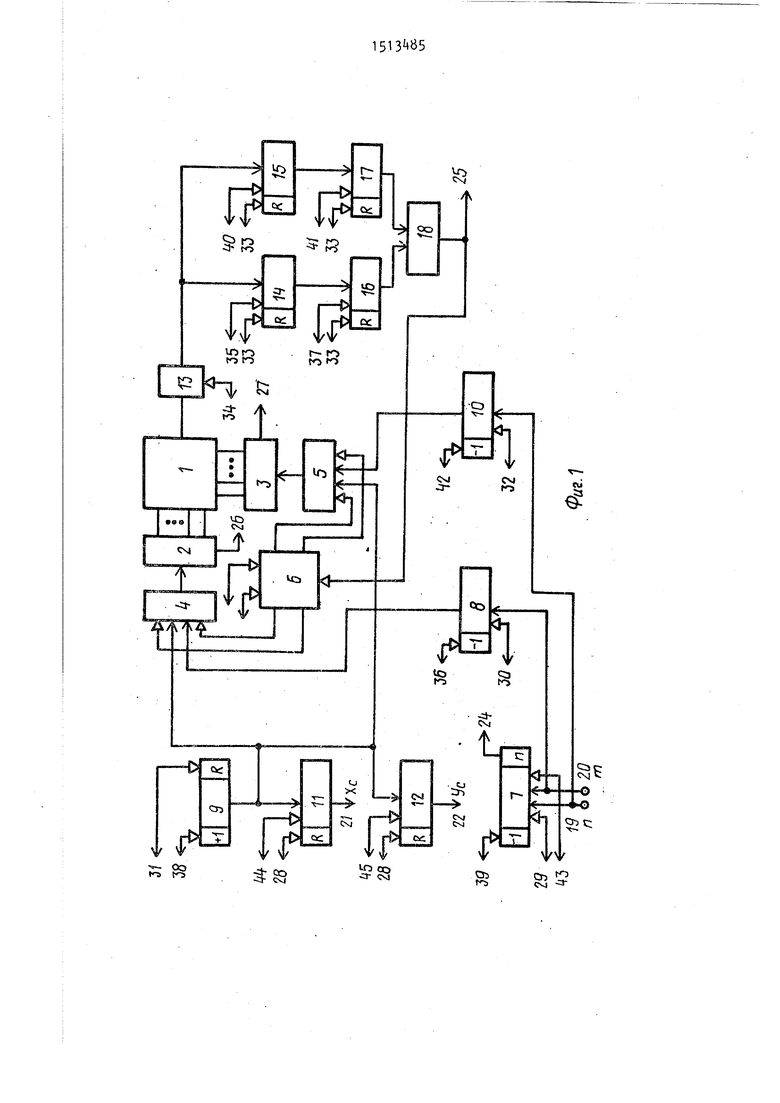
На фиг.1 представ лена схема устройства; на фиг.2 - схема блока управления; на фиг.З - схема блоков выбора строк и столбцов фотоэлектрического датчика и схема блока разрешения чтения фотоэлектрического датчика; на фиг. - комбинационная схема блока управления; на фиг.5 - блок-схема алго- ритма рйботы устройства.
Устройство содержит фотоэлектрический датчик 1, дешифраторы 2 и 3, бло- ки i и 5 выбора строк и столбцов фотоэлектрического датчика, блок 6 разрешения чтения фотоэлектрического датчика, четыре счетчика 7-10, два регистра
11 И 12, аналого-цифровой преобразователь 13, четыре накапливающих сумматора Й-17, схему 18 сравнения, первый 19 и второй 20 управляющие входы уст-- ройства, первый 21 и второй 22 выходы устройства, блок 23 управления.
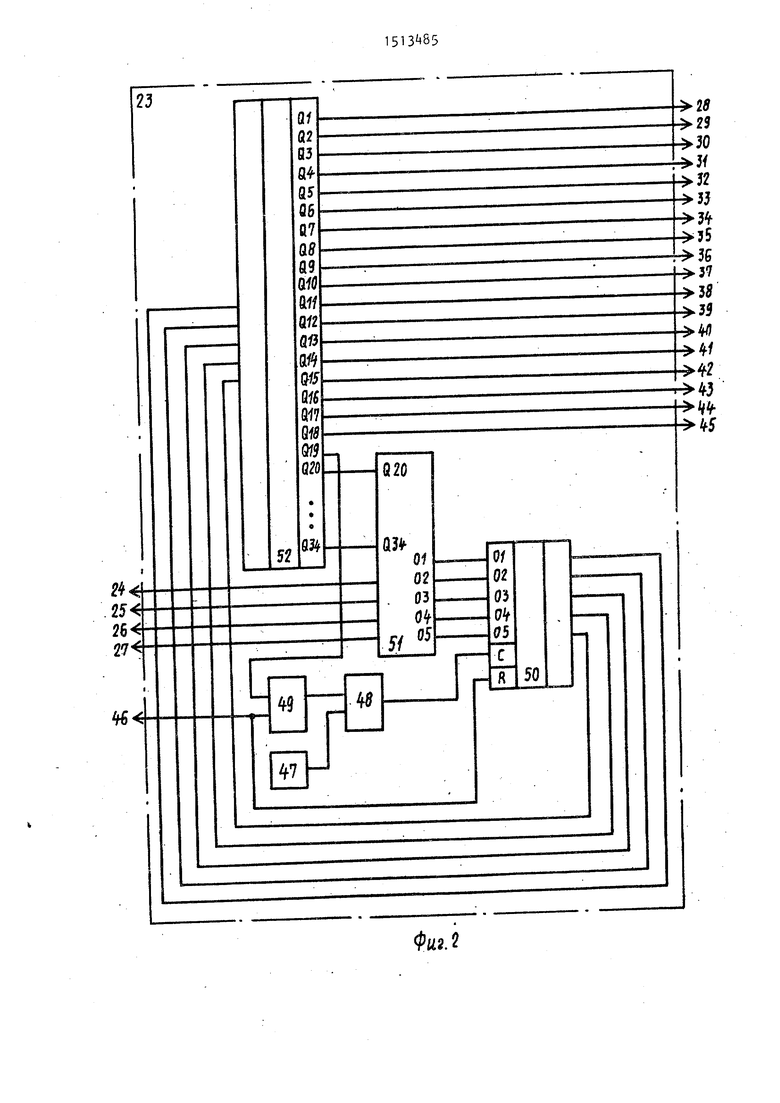
Блок 23 управления содержит информационные входы , выходы , вход Пуск , генератор tj импульсов, элемент И А8, триггер kS, регистр 50, комбинационную схему 51 и блок 52 постоянной памяти.
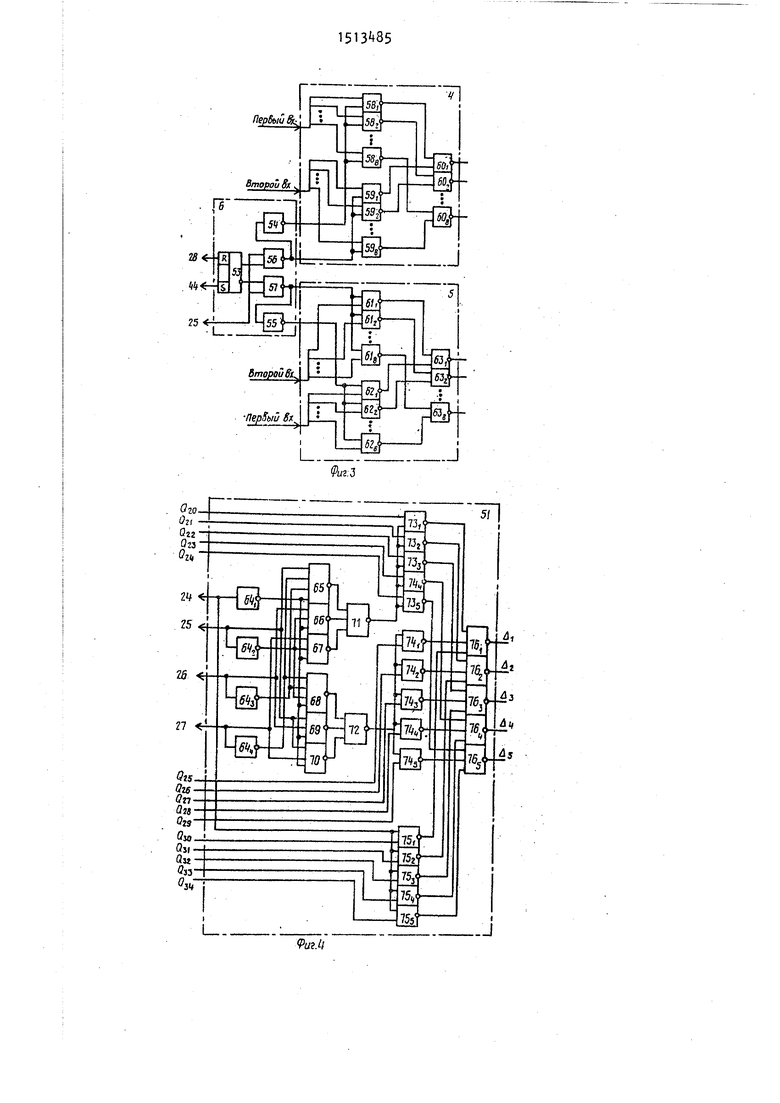
Блок 6 разрешения чтения фотоэлектрического датчика содержит триггер 53, четыре элемента НЕ блок выбора строк.фотоэлектрического датчика содержит три группы элементов И-НЕ 58- .60J блок выбора столбцов фотоэлектри- ческого датчика содержит четвертую - шестую группы элементов И-НЕ 61-63.
3 513 85
Комбинационная схема блока управления содержит (фиг.А) группу элементов НЕ , первый - шестой элементы И-НЕ 65-70, пятый элемент И-НЕ 71, шестой элемент И-НЕ 72, седьмую группу элементов И-НЕ 73, восьмую группу элементов И-НЕ Ik, девятую и десятую группы элементов И-НЕ 75 и 7б.
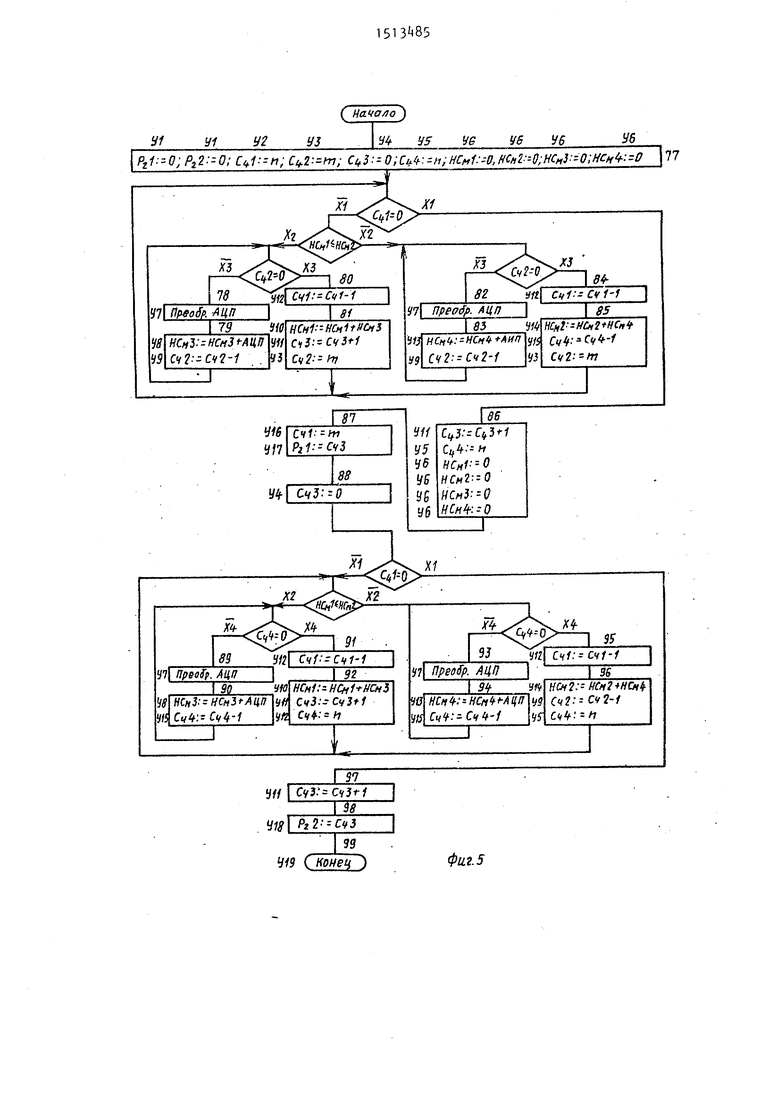
.Блок-схема алгоритма (фиг,5) содер-чо жит блоки 77-99.
Устройство работает следующим образом.
; Изображение проецируется на вход 15 фотоэлектрического датчика 1, который содержит MXN ячеек. Вначале определяется координата .X. По сигналу пуск обнуляется регистр 50, триггер разрешает прохождение импульсов с генератора 720 на синхровход регистра 50. Начинается выборка содержимого постоянного блока 52 памяти с адреса 00000„ На выходах 28-33 блока 23 управления и выходе 2k блока 52 г амяти появляются единичные , 25 потенциалы, происходит выполнение микроопераций блока 77 блок-схемы алгоритма (фиг.5), т.е. обнуление регистров 11 и 12, присвоение значений счетчикам 7 и 10 значения N, счетчику В 30 значения М, а счетчик Э и накапливающие сумматоры 1 - 17 придут в исходное состояние. При поступлении тактового импульса с генератора kl происходит выборка содержимого адреса 00001 3S блока 52, на выходах которого появляются единичные потенциалы,, Происходит запуск аналого-цифрового преобразователя 13. На следующем шаге к содержимому накапливающего сумматора k при-40 бавляется значение блока 13, содержимое счетчика 8 уменьшается на единицу. Происходит выборка и накопление ai-ia- чений ячеек нулевого столбца блока 1.
8это время на выходе 2б дешифратора .зд 2 появляется сигнал и происходит вы. полнение микроопераций блоков 80 и 81 схемы алгоритма, т.е. содержимое счетчика 7 .уменьшается на единицу, к содержимому накапливающегосумматора д 1б прибавляется содержимое накапливающего сумматора I , содержимое счетчика
9увеличивает) на единицу, счетчику 8 присваивается значение М. Процесс продолжается до тех пор, пока значение j. накапливающего сумматора 1б не превы- сит значение накапливающего сумматора 17j после чего происходит накопление значений М-го, (М-1)-го и так далее
столбцов блока 1 в накапливающем сумматоре 15 до тех пор, пока его не превысит значение накапливающего сумматора 1б. Когда ячейки всех столбцов, кроме одного, опрошены, в накапливающих сумматорах 16 и 17 хранятся значения статических моментов инерции левой и правой частей изображения относительно искомой координаты X. К значению счетчика 9 прибавляется единица, а результат присваивается регистру 11 Аналогично осуществляется определение .координаты Y. При этом искомая координата определяется из выражения
е-( qк-г ь
zi|h(j)i z:z:iih()L
a-i
где- llh(j), | ,
||h(n+1--i) II - нормы соответствующих векторов-столбцов матрицы.
Левая и правая части уравнения - статические моменты левой и правой частей изображения относительно искомой координаты X.
Формула изобретения
Устройство для определения коорди- нат центра тяжести изображения, со- дери(ащее фотоэлектрический датчик, первый регистр, три счетчика, блок управления и блок сравнения, первый выход блока управления соединен с зходом - Сброс первого регистра , о т - личающе-еся тем, что, с целью повышения точности устройства, оно содержит четыре накапливающих сумматора, аналого-цифровой преобразователь., второй регистр, блок выбора строк фотоэлектрического датчика, блок выбора столбцов фотоэлектрического датчика, два дешифратора, -блок разрешения чтения фотоэлектрического датчика и четвертый счетчик, выход блока сравнения соединен с первым ин-- формационным входом блока управления, выход фотоэлектрического датчика соединен с входом аналого-цифрового преобразователя, вход запуска которого соединен с седьмым выходом блока уп- равления, а выход соединен с информационными входами первого и второго -.. накапливающих сумматоров, выходы ко- - торых соединены с информационными входами третьего и четвертого накапливающих сумматоров, выходы которых соединены с входами блока сравнения, первый и второй управляющие фотоэлектрического датчика соединены g с выходами первого и второго дешифраторов, информационные входы которых соединены с выходами блоков выбора строк и столбцов фотоэлектрического датчика соответственно, первый и вто- ю рой установочные входы первого счетчика являются первым и вторым управляющими входами устройства, выход переполнения первого счетчика соединен с первым информационным входом блока 15 управления, а вычитающий вход первого счетчика соединен с двенадцатым выходом блока управления, первый и второй входы разрешения записи первого счетчика соединены с вторым и шестнадцатым20 выходами блока управления, установочные входы второго и четвертого счетчиков соединены соответственно с вторым и первым входами устройства, входы
третьим и четвертым выходами блока разрешения чтения фотоэлектрического датчика, первый выход которого соединен с выходом блока сравнения, выход третьего счетчика соединен с информационными входами первого и второго регистров и вторым информационным входом блоков выбора строк и столбцов фотоэлектрического датчика, второй и третий выходы блока разрешения чтения фотоэлектрического датчика соединены с первым и семнадцатым выходами блока управления, входы разрешения записи первого и второго регистров соединены с семнадцатым и восемнадцатым выходами блока управления, а их выходы являются первым и вторым выходами устройства, вход Сброс третьего счетчика соединен с четвертым выходом блока управления, входы Сброс накапливающих сумматоров соединены с шестым выходом блока управления, суммирующий вход третьего счетчика соединен с одиннадразрешения записи второго и четвертого25 цатым выходом блока управления, входы счетчиков соединены с третьим и пятым разрешения записи первого - четвертого выходами блока управления, а вычитаю- Накапливающих сумматоров соединены щие входы соединены с девятым и пятнадцатым выходами блока управления.
соответственно с восьмым, тринадцатым, десятым и четырнадцатым выходами бловыходы второго и четвертого счетчиков 30 ка управления, установочный вход блока
третьим и четвертым выходами блока разрешения чтения фотоэлектрического датчика, первый выход которого соединен с выходом блока сравнения, выход третьего счетчика соединен с информационными входами первого и второго регистров и вторым информационным входом блоков выбора строк и столбцов фотоэлектрического датчика, второй и третий выходы блока разрешения чтения фотоэлектрического датчика соединены с первым и семнадцатым выходами блока управления, входы разрешения записи первого и второго регистров соединены с семнадцатым и восемнадцатым выходами блока управления, а их выходы являются первым и вторым выходами устройства, вход Сброс третьего счетчика соединен с четвертым выходом блока управления, входы Сброс накапливающих сумматоров соединены с шестым выходом блока управления, суммирующий вход третьего счетчика соединен с одиннадцатым выходом блока управления, входы разрешения записи первого - четвертого Накапливающих сумматоров соединены
соответственно с восьмым, тринадцатым, десятым и четырнадцатым выходами бло
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения координат центра тяжести изображения | 1988 |
|
SU1543430A1 |
| Буферное запоминающее устройство | 1990 |
|
SU1833918A1 |
| Устройство для определения координат центра изображения | 1986 |
|
SU1427395A1 |
| Буферное запоминающее устройство | 1983 |
|
SU1124379A1 |
| Устройство для формирования видеосигнала | 1990 |
|
SU1741124A1 |
| Устройство для обработки информации о комплектовании партии деталей | 1986 |
|
SU1425718A1 |
| Генератор случайного марковского процесса | 1989 |
|
SU1619263A1 |
| Буферное запоминающее устройство | 1988 |
|
SU1571679A1 |
| Устройство для ускоренного вычисления матрицы неполного параллелизма | 2016 |
|
RU2634200C1 |
| Устройство для обработки видеоинформации | 1988 |
|
SU1640714A1 |
Изобретение относится к области автоматики и может быть использовано в системах обработки изображений. Цель изобретения, заключающаяся в повышении точности устройства, достигается введением аналого-цифрового преобразователя, двух дешифраторов, блоков выбора строк и столбцов, фотоэлектрического датчика, блока разрешения чтения фотоэлектрического датчика, регистра, двух счетчиков, блока сравнения и четырех накапливающих сумматоров, что позволяет определять координаты центра тяжести изображения по статическим моментам инерции. 5 ил.
соединены с первым информационным входом блоков выбора строк и столбцов фотоэлектрического датчика, первый и второй входы управления которых соединены соответственно с первым, вторым,
управления является входом пуск устройства, управляющие выходы первого и второго дешифраторов соединены с третьим и четвертым информационными входами блока управления.
§
t
00 Cvl
CO
CNl
Oi f
cr
Cvj .2
I
9aiM
Tl
( Нача/ о
{1
s/(; w
/3
HM-- HCHit Cffi
XI
sy
У9