J-Sr
7
7
00
о
CDi/i.l
3151
Изобретение относится к тре}1аже- рам и МС1ЖСТ быть использовано для обучения водителей управлению транспортным средством при взаимодействии на дороге с другими участниками движения в условиях объездов и обгонов .
Цель изобретения - повышение эффективности обучения путем прибли- жения условий обучения к реальным.
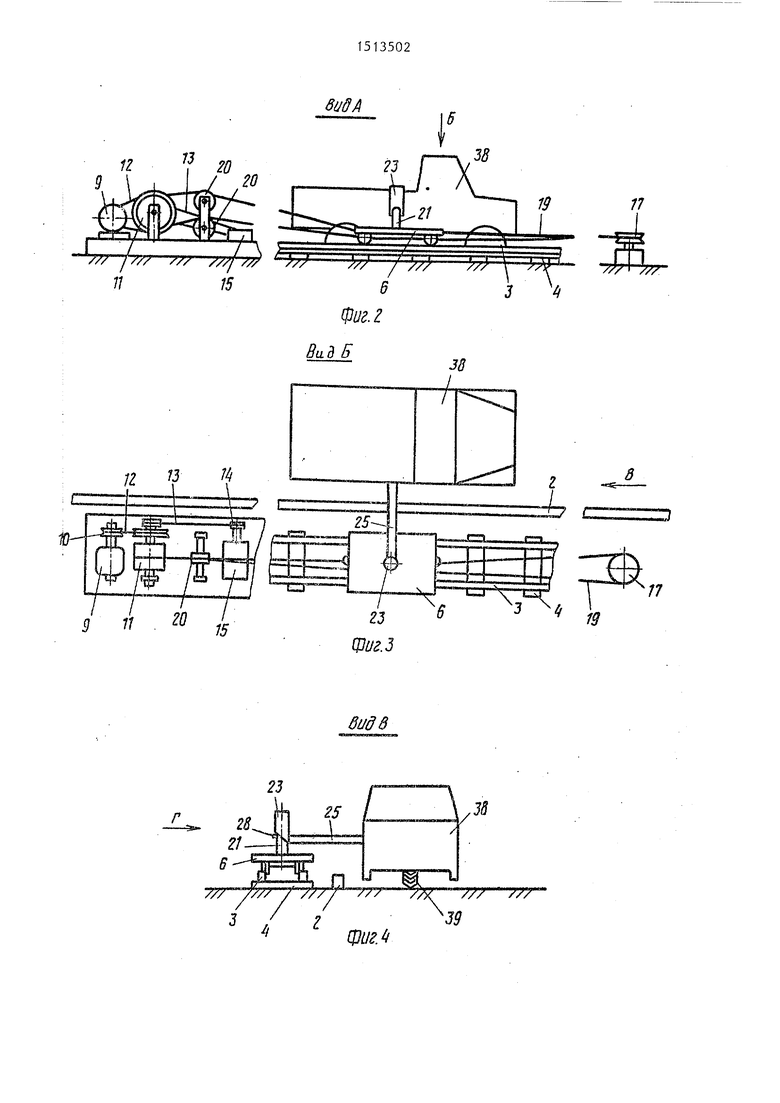
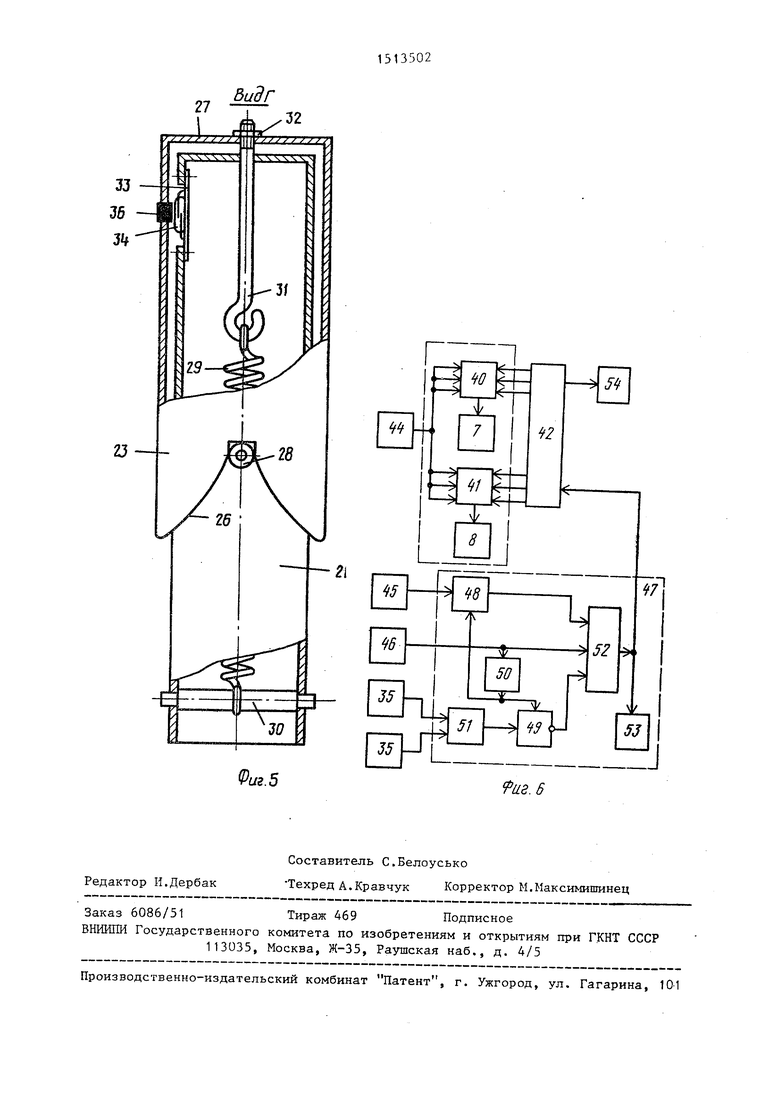
На фиг.1 изображена схем а тренажера, общий вид; на фиг.2 - вид А на фиг.1; на фиг.З - вид Б на фиг.2; на фиг.4 - вдп, В на фиг.З; на фиг.З- вид Г на фиг,4; на фиг,б - структурная схема блока контроля и связи его с задатчиком программы и с датчиками рубежа и столкновения.
Па испытательной трассе 1 по обе боковые Стороны установлено защитное ограждение (бордюр) 2, за которыми размещены путепроводы, выполненные в виде рельс.3, прикрепленных к шпалам 4, уложеньм на трассе 1, На рель сах 3 установлены подвижные тележки 5 и 6. На одном конце путепроводов смонтированы электроприводы 7 и 8 перемещения подвижных тележек 5 и 6, имеющие в своем составе электродви- гатель 9 с ведуи им шкивом 10, бараба 11 с тормозным устройством, клиноре- менную передачу 12, цепную передачу 13 и механизм 14 считывания пути с блоком 15.
Механизм считывания пути представляет собой винт, на котором смонтирована копирная гайка. На другом конце путепроводов установлены концевые блоки 17 и 17, охваченные тросаьт 18 и 19, огибающими барабан 11 и натяжные ролики 20 и связанными с подвижными тележками 5 и 6. На подвижных тележках 5 и б закреплены вертикальные стойки 21, на которых шарнирно установлены поворотные головки 22 и 23, жестко связанные с рычагами 24 и
25,Нижний торец поворотной головки 23 имеет симметричный фигурный вырез
26,а верхний - приваренное донышко 27 с отвсзрстием в центре. Поворотная головка своим симметричным фигурным вырезом опирается на опорный ролик 28, установленный на боковой поверхности вертикальной стойки 21, Внутри вертикальной стойки 21 размещена пру жина 29, нижний конец которой посредтвом штыря 30 связан с вертикальной стойкой 21, а верхний - соединен со
0 с
0 c
0
5
штоком 31. Конец штока 31 пропущен в отверстие н центре донышка 27 и при помощи гайки 32 прикреплен к доньш1ку 27. В отверстии боковой поверхности вертикальный стоек 21 на плате 33 размещен неподвижный элемент 34 (маг- нитоуправляемые нормально замкнутые контакты) датчиков 35 столкновения, подвижный элемент 36 (магнит) которых закреплен на поворотных головках 22 и 23.
В исходном состоянии под действием магнита 36 контакты датчика столкновения разомкнуты. С рычагами 24 и 25 жестко связаны объемные макеты 37 и 38 транспортных средств, опирающиеся на испытательную трассу 7 посредством колес 39, Объемные 1 1акеты 37 и 38 выполнены в натуральную величину, например из фанеры. Входы злектроприво- дов 7 и 8 подключены к выходам блоков 40 и 41 управления, входы которых подключены к выходам задатчика 42 программ. Объемные макеты 37 и 38 транспортных средств, путепроводы,3, подвижные тележки 5 и б, электроприводы 7 и 8 перемещения подвижных тележек и блоки 40 и 41 управления образуют имитатор дорожной обстановки. На испытательной трассе 1 в зоне движения учебного транспортного средства 43 скрытно установлены три датчика 44-46 рубежа, выдающие сигнал в момент наезда на них колес учебного транспортного средства 43 или в момент проезда его над датчиками. Выход первого датчика рубежа подключен к дополнительным входам блоков 40 и 41 управления.
Тренажер содержит также блок 48 контроля, включающий в свой состав два блока 48 и 49 памяти, элемент 50 задержки, сумматор 51, блок 52 сравнения и звуковой сигнализатор 53.
Вход первого блока 48 памяти подключен к первому входу блока 47 контроля, соединенному с выходом второго датчика 45 рубежа, прямой выход - к первому входу блока 52 сравнения, вькод которого подключен к выходу звукового сигнализатора 53 и к выходу блока 47 контроля, соединенному с входом задатчика 42 программ. Второй вход блока 52 сравнения и вход элемента 50 задерлжи подключены к второму входу блока 47 контроля, соединенному с выходом третьего датчика 46 рубежа. Входы сумматора 51
51
подключены к остальным входам блока
47контроля, связанным с выходами датчиков 35 столкновения. Выход элемента 50 задержки подключен к первым установочным входам обоих блоков
48и 49 памяти, а выход сумматора 51 - к второму установочному входу второго блока 49 памяти, инверсный выход которого подключен к третьему входу блока 52 сравнения.
На обочине испытательной трассы 1 установлен многопозиционный дорожный знак 54, подключенный к дополнительному выходу задатчика 42 программ. Блоки 40 и 41 управления, за- датчик 42 программ, блоки 48 и 49 памяти, сумматор 51, элемент 50 задержки, блок 52 сравнения, устройство переключения многопозиционного дорожного знака 54 и звуковой сигнализатор 53 образуют схему контроля и управления процессом обучения.
Блоки 40 и 41 управления выполнены, например, в виде магнитных пускателей, подключенных к устройствам для регулировки скоростей вращения электродвигателей 9. Задатчик 42 программ выполнен, например, в виде регистра сдвига или шагового искателя, соответствующие выходы дорожек которого соединены с входами блоков 40 и 41 управления и устройства переключения многопозиционного дорожного знака 54, а обмотка управления - к выходу блока 52 сравнения. В качестве блоков 48 и 49 памяти могут быть использованы Т-триггеры с установочными входами. Сумматор 51 выполнен, например, в виде логического элемента ИЛИ, элемент 50 задерж-. ки - в виде ждущего мультивибратора, блок 52 сравнения - в виде логического элемента И, звуковой сигнализатор 53 - в виде автогенератора с усилителем и динамической головкой-.
Предлагаемый тренажер работает следующим образом.
Упражнение Объезд стоящего транспортного средства при встречном движении .
В исходном положении объемные макеты 37 и 38 транспортных средств находятся на начальных участках путепроводов. На лицевой панели многопозиционного дорожного знака 54 изображен дорожный знак Объезд препятствия слева. На выходах задатчика 42 программ, соединенных с блоком 40 уп0
35026
равления и с устройством переключения многопозиционного дорожного знака 54, установлены нулевые уровни напряжения, а на одном (первом) из выходов
задатчика 42 программ, соединенном с выходом блока 41 управления - единичный. Блоки 48 и 49 памяти установлены в нулевое состояние, а контакты датчиков 44-46 рубежа и контакты датчиков 35 столкновения - разомкнуты, при этом на выходах третьего датчику 46 рубежа и первого блока 48 памяти установлены нулевые уровни напряже ния, на инверсном выходе второго блока 49 памяти - единичный уровень напряжения, а на выходе блока 52 сравнения - нулевой уровень напряжения. При управлении учебным транспортQ ным средством 43 водитель должен
руководствоваться предписаниями многопозиционного доролшого знака 54.
8момент наезда колес учебного транспортного средства 43 на первый дат5 чик 44 рубежа контакты датчика замыкаются и формируют электрический сигнал, поступающий в блоки 40 и 41 управления. Так как на первом входе блока 41 управления, соединенного с выходом задатчика 42 программ, установлен сигнал разрешения, под воздействием сигнала первого датчика 44 рубежа срабатывает первый магнитный пускатель этого блока управления и через устройство регулирования ско5 рости вращения включается электродвигатель 9.
Ведущий шкив 10 электродвигателя
9начинает вращаться с максимальной (первой) скоростью. Через клипоремен кую передачу 12 вращение от ведущего шкива 10 передается барабану 11, который начинает вращаться по часовой стрелке. При этом нижняя ветвь троса 19, огибая концевой блок 17 и натяж ной ролик 20, наматывается на барабан 11. Одновременно верхняя ветвь троса 19 сматывается с барабана 11, и подвижная тележка 6 вместе с объемным макетом 38 дв1-гжется вперед на первой скорости, например 30 км/ч. Посредством цепной передачи 13 вращение от барабана 11 передается механизму 14 считывания пути. Винт этого механизма вращается и переме щает копирную гайку. В крайних положениях копирная гайка нажимает на концевые выключатели блока 15 и устанавливает следуюсще режимы: оста0
новку электродвигателя 9 при подъезде подвижной тележки б к краю путепровода, вращение электродвигателя 9 в обратпом направлении, остановку подвилсной тележки 6 на начальном участке путепровода. В результате этого обеспечивается перемещение объемного макета транспортного средства по полосе двилсения с установленной задатчиком 42 программ скоростью и автоматический возврат объемного макета транспортного средства в исходное положение.
При срабатывании первого датчика 44 рубежа электропривод 7 не включается, так как на выходах задатчика 42 программ, соединенных с входами блока 40 управления, установлены пулевые уровни напряжения. Поэтому объемный макет 37 транспортного средства остается неподвижным и в соответствии с предписанием многопозиционного дорожного знака 54 водитель совершать объезд неподвижного объемного макета 37 при одновременно движущемся навстречу ему на первой скорости объемном макете 38.
Учебное транспортное средство 43 по траектории 55 (фиг.1) объезжает стоящий объемный макет 37 транспортного средства, выезжая при этом па, ПОЛОСА встречного движения. В момент наезда колес учебного транспортного средства па второй датчик 45 рубежа его контакты замыкаются и формируют сигнал, поступающий на первый вход блока 47 контроля, т.е. на вход первого блока 48 памяти, переключая его Единичный уровень напряжения с выхода этого блока 48 памяти устанавливается на первом входе блока 51 срав пения.
При дальнейшем движении учебного транспортного средства 43 его колеса наезжают на третий датчик 46 рубежа контакты его замыкаются и сформированный сиг:: ал поступает на вход элемента 50 задержки и на второй вход :5лока 52 сравнения. В этот момент времени на всех входах блока 52 сранения устанавливаются единичные урони напряжения и па его выходе формируется сигнал, поступающий затем :ia входы задатчика 42 nporpa№i и зв хового сигнализатора 53. В результате включаемся звуковой сигнализатор ,53, информирующий водителя о правил
10
15
20
25
30
35
40
45
50
55
но выполненном объезде, а задатчик 42 программ переключается в следующее положение. В соответствии с программой на его выходе, соединенном с вторым входом блока 41 управления, устанавливается единичный уровень напряжения, а на остальнь х выходах - нулевые уровни.
Сигнал, поступающий с третьего датчика 46 рубежа на вход элемента 50 задержки, задерживается иьз на время переключения блока 52 сравнения и подается на первые установочные входы обоих блоков 48 и 49 памяти, устанавливая их в исходное (нулевое) состояние.
Таким образом, после правильного выполнения водителем объезда стоящего объемного макета 37 транспортного средства при одноврекешшм движении навстречу на максимальной скорости объемного макета 38 задатчик 42 программ переключается на следующую программу и формирует на своих выходах соответствующие сигналы. Блоки 48 и 49 памяти устанавливаются в исходное состояние, показание многопозиционного дорожного знака не меняется, объемный макет 38 возвращается в начальное поломсение, а второй магнитный пускатель блока 41 управления подготовлен к включению повышенной (второй) скорости вращения электродвигателя 9 электропривода 8,
Водитель снова выполняет упражнение Объезд стоящего транспортного средства при встречном движении. При этом объемный макет 38 после срабатывания первого датчика 44 рубежа движется с повышенной, по сравнению с первым заездом, скоростью, например 40 км/ч. Увеличение скорости движения встречного объемного макета 38 усложняет условия вьшолнения водителем упражнения и предъявляет к его навыкам объезда повышенные требования. При правильном объезде стоящего объемного макета 37 элементы тренажера работают в том же порядке, как и в нервом заезде, а сигнал с выхода блока 52 сравнения переводит датчик 42 программ в третье положение.
Для следующих заездов учебного транспортного средства 43 единичный уровень напряжения устанавливается последовательно на других выходах задатчика 42 программ, соединенных с входами блока 41 управления. На
остальных выходах задатчика 42 программ после его переключения сохраняются нулевые уровни напряжений. Для последнего заезда первого упражнения скорость движения объемного макета 38 устанавливается задатчи- ком 42 программ максимальной. Поэто- fy при выполнении этого заезда водитель должен сначала остановиться перед объемным макетом 37 и пропустить движущийся навстречу ему объемный макет 38, а затем произвести объезд стоящего объемного макета 37. Если объезд при этом выполнен правильно и не произошло столкновения учебного транспортного средства 43 с объемньми макетами 37 или 38, то задатчик 42 программ переключается. На его дополнительных выходах, соединенных с входом устройства переключения многопозиционного дорожного знака 54 и с первыми входами блоков 40 и 41 управления, появляются единичные уровни напряжения. На лицевой панели многопозиционного дорожного знака 54 появляется новый дорожный знак - Ограничение минимальной скорости 40 км/ч. Магнитные пускатели блоков 40 и 41 управления готовы по сигналу первого датчика 44 рубежа к включению первых скоростей движения объемных макетов 37 и 38. Водитель приступает к выполнению второго упражнения - Обгон при встречном движении.
Если при выполнении первого уп- ражнения по объезду стоящего транспортного средства водитель на учебно транспортном средстве 43 совершает столкновение, например, с макетом 38 то под действием удара этот макет перемещается по дуге в направлении против часовой стрелки, а рычаг 25 поворачивает поворотную головку 23 в том же направлении. Поворотная головка 23 скосами нижнего выреза 26 скользит по onopHONry ролику 28 и одновременно перемещается вверх по вертикальной стойке 21. В результате поворотная головка 23 посредством рычага 25 приподнимает объемный ма кет 38 над поверхностью дорожного покрытия и переносит его через защитное ограждение 2 за пределы проезжей части трассы 1. Вместе с поворотной головкой 23 происходит смещение вверх штока 31, что вызывает натяжение расположенной внутри вертикальной стойки 21 пружины 29, После проезда учебного транспортного средства 43 через место столкновения, т.е. при выходе его из контакта с объемным макетом 38 за счет скосов фигурного выреза 26 и усилия пружины 29 поворотная головка 23 с рычагом 25 возвращается в исходное положение. Q Объемный макет 38 транспортного средства устанавливается на проезжую часть трассы 1.
В момент столкновения учебного транспортного средства 43 с объемным 5 макетом транспортного средства и поворота поворотной головки 23 магнит 36 отходит от неподвижного элемента 34 датчика 35 столкновения и его контакты замыкаются. Сформированный эти- 0 ми контактами сигнал столкновения учебного программного средства 43 с объемньом макетом транспортного средства проходит через сумматор 51 и переводит второй блок 49 памяти в еди- 5 ничное состояние. На инверсном выходе второго блока 49 памяти устанавливается нулевой уровень напряжения, поступающий на третий вход блока 52 сравнения. Поэтому после выполнения во- Q дителем упражнения на третьем входе блока 52 сравнения также устанавливается нулевой уровень напряжения и в момент появления сигнала с третьего датчика 46 рубежа напряжение на выходе блока 52 сравнения не изменяется. Звуковой сигнализатор 53 не срабатывает и задатчик 42 не переключается и остается в прежнем состоянии.
Таким образом, учебное транспортное средство 43 и объемные макеты транспортных средств при столкновении не повреждаются, а задатчик. 42 программ сохраняет для cлeдyюE eгo заезда прежнюю програ п гу функционирования элементов тренажера. Водитель получает возможность повторить заезд в таких же условиях.
Упражнение Обгон транспортного средства при встречном дв1-шении.
После правильного выполнения водителем всех заездов первого упражнения, предназначенного для формирования навыков объезда неподвижного транспортного средства, на всех вхо- 5 дах блока 52 сравнения устанавливают-- ся единичные уровни напряжения. Задат- чик 42 программ переключается и на лицевой панеле многопозиционного дорож5
0
5
0
11 15 ого знака 54 устанавливается новый нак - Ограпичепне максимальной скоости 40 км/ч. Единичные уровни напяжения , устаноБИВ1ш-1еся на первых ходах блоков 40 и 41 управления, выают разрешение на включение первых коростей электронрйводов 7 и 8.
В момент наезда колес учебного ранспортного средства 43 на первый датчик 44 рубежа его контакты формируют электрический сигнал , пос- тупарощий в блоки 40 и 41 управления. Первые магнитные пускатели этих блоков управления срабатывают и через устройства регулирования скоростей включают электроприводы 7 и 8, Объемные макеты 37 и 38 транспортных средств начинают двигаться навстречу друг другу на первых скоростях (30 км/ч). Руководствуясь предниса- нием установленного дорожного знака, водитель на скорости не менее 40 км/ч должен совершить обгон движущегося объемного макета 37 транспортного средства.
При правильно выполненном обгоне колеса учебного транспортного средствам 43 наезжают сначала на второй /датчик 45 рубежа, а затем на третий датчик 46 рубежа. Сигнал с второго датчика 45 рубежа поступает на вход первого блока 48 памяти и переключает его. Единичный уровень напряжения с прямого выхода первого блока 48 памяти устанавливается iia первом входе блока 52 сравнения. В момелгт замьн а Н1я контактов третьего датчика 46 рубежа на всех входах блока 52 сравне1п-1я устанавливаются единичные уровни напряжения и сигнал с его выхода поступает на входы задатчика 42 программ и звукового сигнализатора 53. Последний включается, информируя водителя о нравильно выполненном обгоне, а задатчик 42 программ переключается в следующее положение. Сог- ласно программе на его дополнительных выходах, соединенных с устройством переключения многопозиционного дорожного знака 54 и с вторыми входами блоков 40 и 41 управления, устанавливаются единичные уровни нанря- лсения. Па лицевой панели многопозиционного дорожного знака 54 устанавливается дорожный знак Ограничение минимальной скорости 50 км/ч.
Объемные макеты 37 и 38 при достижении конечного участка путепро0
3502 2
вода автоматически возвращаются в исходное положение, блоки 48 и 49 памяти устанавливаются в нулевое состоя 1ие, а блоки 40 и 41 унравле ния подготавливаются к включению вторых скоростей электропроводов 7 и 8, которые обеспечивают движение объемных макетов 37 и 38 со скоростью 40 км/ч. На скорости не менее 50 км/ч и в усложненнЕ)1Х условиях водитель выполняет второй заезд. После правильного его выполнения на лицевой панели многопозиционного дорожг ного знака 54 устанавливается дорожный знак Ограничение минимальной . -т скорости 60 км/ч, а блоки 40 и 41 управления готовы по сигналу с первого датчика 44 рубежа включить третьи
20 скорости электроприводов 7 и 8. Таким образом, при правильном выполнении заезда для следующего заезда скорости двюкения объемных макетов 37 и 38 и требования к минимальной скорости
25 учебного транспортного средства 43 повышаются, т.е. условия выполнения упражнения усложняются
Если при выполнении второго упражнения по обгону транспортного
3Q средства происходит столкновение учебного транспортного средства 43 с объемным макетом 37 или 38, объемный макет от удара неремеш;ается за защитное ограждение 2. и контакты неподвижного элемента 34 датчика 35 столкновения сформируют электрический сигнал. Этот сигнал устанавливает на третьем входе блока 52 сравнения нулевой уровень напряжения и после окончания заезда учебного тр-анспорт- ного средства 43,по трассе 1 звуковой сигнализатор 53 не срабатывает, а задатчик 43 нрограмм не переключается. Водитель должен повторить
, упражнение в прежних условиях. Если 45
водитель не выполняет предписания
многонозициоппого дорожного знака ограничение максимальной скорости ,, т.е. снижает скорость учебного транспортного средства 43 ниже установленного этим знаком показания, обгон объемного макета не происходит и учебное транспортное средство 43 дви- хсется за объемным макетом 37, В этом случае контакты второго датчика 45 не замыкаются, первый блок 48 памяти не переключается и на нервом входе блока 52 сравнения постоянно устанавливается нулевой уровень напряже35
40
50
ния. Поэтому после выполнения заезда и срабатывания третьего датчика 46 рубежа напряжение на выходе блока 52 сравнения не изменяется. Звуковой сигнализатор 53 не срабатывает, а задатчик 42 программы не переключается. Водитель снова повторяет заезд при прежних скоростях движения объемных макетов 37 и 38 транспортных средств и требованиях к минимальной скорости движения учебного транспортного средства 43.
Формула изобретения
1. Тренажер транспортного средства, содержаш.ий испытательную трассу с защитным ограждением, блок контрол задатчик программ, вход которого подключен к выходу блока контроля, и имитатор дорожной обстановки, включающий Б себя объемные макеты транспортных средств, путепроводы, размещенные На испытательной трассе, подвижные тележки, установленные на путепроводах, электроприводы перемещения подвижных тележек и блоки управления, входы которых подключены к выходам задатчика программ, а выходы - к входам электроприводов перемещения подвижных тележек, отличающийся тем, что, с целью повышения зффективности обучения путем приближения условий обучения к реальным, он снабжен многопозиционным дорол ным знаком, подключенным к дополнительному выходу задатчика программ, тремя датчиками рубежа, последовательно расположенными на ис ,пытательной трассе, первый из которых подключен к дополнительным входам блоков управления, второй и третий соответственно к первому и вто- входам блока контроля, и датчиками столкновения, подключенными к остальньм входам блока контроля, при этом путепроводы размещены за пределами защитного ограждения по обе стороны от испытательной трассы, на подвижных тележках закреплены вертикальные стойки, на которых шар- нирно установлены поворотные головки, подпружиненные в осевом направQ
0
5
0
5
0
5
0
Ленин относительно BCpTHKaJibHbix стоек и связанные посредствоь рычагов с объемными макетами транспортных средств, на боковой поверхности вертикальных стоек закреплен опорный ролик, взаимодействую11р1Й с фигурным вырезом, выполненным в поворотных головках, а подвижные и неподвижные элементы датчиков столкновения установлены на поворотных головках и вертикальных стойках.
2.Тренажер по п.1, отличающийся тем, что блок контроля содержит два блока памяти, элемент задержки, сумматор, блок сравнения
и звуковой сигнализатор, при этом вход первого блока памяти подключен к первому входу блока контроля, прямой выход - к первому входу блока сравнения, вькод которого подключен к входу звукового сигнализатора и к выходу блока контроля, второй вход блока сравнения и вход элемента задержки подключен к второму входу блока контроля, к остальным входам блока сравнения подключены входы сумматора, выход элемента задержки подключен к первым установочным входам обоих блоков памяти, а выход сумматора - к второму установочному входу второго блока памяти, инверсный выход которого подключен к третьему входу блока сравнения.
3.Тренажер по пп. 1 и 2, отличающийся тем, что блоки управления работой электроприводов перемещения подвижных тележек представляют собой магнитные пускатели, подключенные к устройстам регулировки скорости вращения электродвигателей, задатчик программ выполнен из регистров сдвига или представляет собой шаговый искатель, соответствующие выходы дорожек которого соединены с соответствующими входами блоков и последовательность распайки дорожек которого определена программо;, в качестве узлов памяти использованы Т-триггеры с установочными входами,
в качестве сумматора и узла сравнения - соответственно логические элементы ИЛИ и И, в качестве узла задержки - ждущий мультивибратор.
виОА
/ , /
/// I /// хх /у/
5 7f
;7
Щиг.

| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕНАЖЕР ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2025784C1 |
| Тренажер транспортного средства | 1987 |
|
SU1508265A1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2462696C1 |
| Тренажер транспортного средства | 1983 |
|
SU1141442A1 |
| Способ управления движением транспортных средств с системами помощи водителю в среде "интеллектуальная транспортная система - транспортное средство - водитель" | 2021 |
|
RU2774261C1 |
| Тренажер для водителей транспортных средств | 1988 |
|
SU1626260A1 |
| Устройство для обучения водителей транспортных средств | 1986 |
|
SU1350658A1 |
| Тренажер транспортного средства | 1983 |
|
SU1159052A1 |
| Система для испытания транспортных средств на топливную экономичность | 1985 |
|
SU1587367A1 |
| Устройство для обучения водителей транспортных средств | 1985 |
|
SU1427409A1 |
Изобретение относится к тренажерам и может быть использовано для обучения водителей управлению транспортным средством при взаимодействии на дороге с другими участниками движения в условиях объездов и обгонов. Цель изобретения - повышение эффективности обучения путем приближения условий обучения к реальным. Тренажер содержит испытательную трассу 1, путепроводы с установленными на них подвижными тележками 5, 6, связанные с объемными макетами 37,38 транспортных средств, многопозиционный дорожный знак 54 и схему контроля и управления. В зависимости от задаваемой программы водитель на учебном транспортном средстве 43 совершает объезд неподвижного объемного макета 37 при наличии встречного движения и обгон движущегося объемного макета 37 транспортного средства в условиях встречного движения объемного макета 38. 2 з.п. ф-лы, 6 ил.
/// //// / /// / /// /А: /7/ //7 /
Т
/
Т
| Тренажер транспортного средства | 1978 |
|
SU826394A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
